《计算机控制技术》课程设计——数字PID控制系统实现与分析
版权申诉
"《计算机控制技术》课程设计文档主要涵盖了数字PID控制系统的设计,包括系统的目的、任务、要求,以及方案设计、硬件电路、控制算法、软件编程和实验结果的详细内容。该设计以89C51单片机为核心,结合A/D和D/A转换器,构建一个闭环反馈控制系统,并采用梯形积分型PID控制算法。"
在《计算机控制技术》课程设计中,主要目的是让学生通过实践全面理解和掌握课堂所学内容,提升实践能力和综合素质。设计任务涉及硬件和软件两部分,硬件部分需要设计89C51单片机的最小系统,配合ADC和DAC电路,以及由运算放大器构建的被控对象。软件部分则包含主程序、中断程序、A/D和D/A转换程序,以及核心的PID控制算法和滤波程序。
数字PID控制系统的方案设计中,首先介绍了系统的控制框图和闭环工作原理。A/D转换电路用于将模拟信号转化为数字信号,D/A转换电路则将处理后的数字信号还原为模拟信号进行输出。控制对象通常是一个物理系统,如电机、温度控制器等,需要通过运放电路实现。
控制算法部分,采用了梯形积分型PID控制,这是一种常见的控制策略,它通过比例、积分和微分三个部分来调整控制量,以实现对系统响应的精确控制。选择合适的采样周期对于控制效果至关重要,因为这直接影响到系统的稳定性和响应速度。
软件编程设计部分,主程序负责系统的整体流程控制,定时中断程序用于定期执行特定任务,如数据采集和控制更新。PID程序执行控制计算,根据误差信号调整控制输出,而滤波程序则用于消除噪声,提高控制精度。
实验与结果分析阶段,学生需要调试系统,确保其正常运行,并通过实验验证控制系统的性能。实验结果分析可以帮助理解控制策略的效果,识别可能存在的问题,并进行优化。
最后,小结与体会部分,学生总结整个设计过程中的收获,反思设计的难点和解决办法,以提高自己的工程素养和问题解决能力。
这个课程设计项目旨在让学生在理论学习的基础上,通过实际操作体验计算机控制系统的开发流程,强化理论知识的应用,提升实践技能。
2
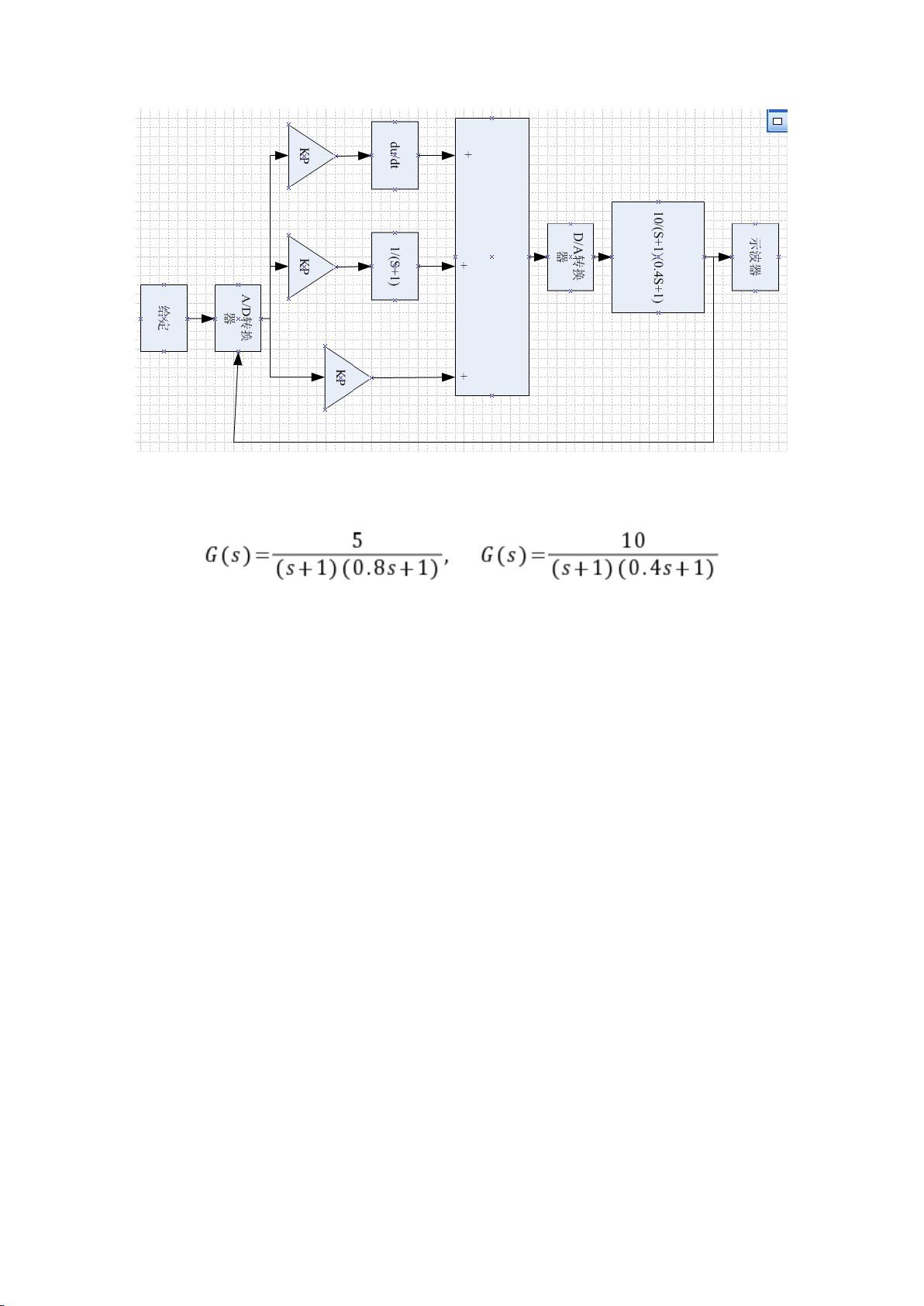
图 1-1 系统结构框图
该闭环控制系统的被控对象为二阶控制对象:
首先利用模数转换单元对两路信号(给定和输出)进行采样,经 A/D 转换后输入
到单片机中,由单片机计算偏差,在进行 PID 计算,然后输出给 D/A 转换器,转换成
为模拟量后,最后对控制对象进行控制。被控对象由两只运放及阻容元件构成。
2.2 闭环工作原理
由信号正向通路和反馈通路构成闭合回路的自动控制系统,又称反馈控制系统。
基于反馈原理建立的自动控制系统。所谓反馈原理,就是根据系统输出变化的信息来
进行控制,即通过比较系统行为(输出)与期望行为之间的偏差,并消除偏差以获得
预期的系统性能。在反馈控制系统中,既存在由输入到输出的信号前向通路,也包含
从输出端到输入端的信号反馈通路,两者组成一个闭合的回路。因此,反馈控制系统
又称为闭环控制系统。反馈控制是自动控制的主要形式。自动控制系统多数是反馈控
制系统。在工程上常把在运行中使输出量和期望值保持一致的反馈控制系统称为自动
调节系统,而把用来精确地跟随或复现某种过程的反馈控制系统称为伺服系统或随动
系统。
反馈控制系统由控制器、受控对象和反馈通路组成(见图)。图中带叉号的圆圈
为比较环节,用来将输入与输出相减,给出偏差信号。这一环节在具体系统中可能与
控制器一起统称为调节器。以炉温控制为例,受控对象为炉子;输出变量为实际的炉
剩余16页未读,继续阅读
174 浏览量
1189 浏览量
点击了解资源详情
2021-10-06 上传
2021-10-07 上传
2021-11-02 上传
2021-09-06 上传
2021-09-13 上传
2022-05-16 上传

小虾仁芜湖
- 粉丝: 115
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
