LabVIEW驱动的焊缝起始点视觉识别:一种高效自动引导系统
51 浏览量
更新于2024-08-26
收藏 863KB PDF 举报
基于LabVIEW的焊缝起始点视觉识别是一项结合了计算机视觉技术和NI LabVIEW平台的创新应用。这项研究由朱振友、林涛和陈善本三位作者,来自上海交通大学材料科学与工程学院,他们专注于将视觉传感技术应用于工业焊接自动化中,特别是焊缝起始位置的精确识别。他们面临的挑战是开发一种经济、灵活且能够在局部环境中有效工作的系统,以支持焊接机器人的自动导航。
该研究采用了National Instruments (NI) 的IMAQ Vision Builder,这是一种强大的图像处理工具,配合LabVIEW(图形化编程环境)的图片控制工具包和执行程序生成器。他们利用PCI-1409图像采集卡作为硬件基础,这些产品提供了高质量的图像获取和处理能力。通过集成LabVIEW的子VI功能,他们能够有效地处理图像的尺度变化和旋转角度问题,实现了焊缝图像的精确匹配和识别。
他们的方法巧妙地结合了模板匹配和模式识别技术,同时充分利用焊缝图像的边缘信息,提高了识别的准确性和精度。这种方法的优点在于系统的调试和维护简单,运算速度快,使得系统能够适应不同的焊接任务需求,如在无外部光源的情况下进行视觉引导。
焊接机器人在现代制造业中的广泛应用已经显著提升了生产效率,但传统示教再现型机器人仍存在示教复杂、定位精度依赖工装卡具等问题。通过视觉引导,机器人能够根据实时感知的焊缝信息进行自我调整和路径规划,这对于提高焊接质量、扩大应用范围(如核环境和太空等特殊场合)具有重要意义。
因此,基于LabVIEW的焊缝起始点视觉识别技术不仅革新了焊接机器人的控制方式,也推动了焊接自动化向着更智能、自主的方向发展。这一研究结果对于推进工业4.0时代的智能制造有着积极的贡献。
·china.info@ni.com National Instruments
基于 LabVIEW 的焊缝起始点视觉识别
A LabVIEW-based weld beam visual recognition
作者:朱振友,林涛,陈善本
单位:上海交通大学 材料科学与工程学院
应用领域:研究和开发
挑战:采用视觉传感技术,研究
在局部环境中对焊缝起始位置
的识别方法,为进一步实现对焊
接机器人的自动导引提供支持。
应用方案:使用National
Instruments公司的IMAQ Vision
Builder、LabVIEW 图片控制工
具包、执行程序生成器和
LabVIEW来开发一个经济、灵活
的基于PC的立体视觉导引系
统。
使用的产品:LabVIEW;IMAQ
Vision Builder;PCI-1409图像
采集卡
介绍
将 NI 公司的 IMAQ Vision
Builder 与LabVIEW 软件用于对
焊接机器人的导引过程控制中,
通过采用 LabVIEW 提供的子 VI
功能及图像处理软件包实现了
对图像尺度及旋转角度变化的
焊缝图像匹配识别。该方法通过
将传统的模板匹配与模式识别
技术与焊缝图像的边缘信息相
结合,识别的准确性及精度较
高,并且系统的调试及维护简
便、方便,而且运算速度较快。
0 序 言
焊接是制造加工业中的重
要工艺技术之一,是一个集热、
电、力、光等综合作用的复杂过
程。将机器人应用于焊接领域是
焊接自动化的革命性进步,它彻
底改变了以往焊接过程刚性自
动化的传统方式,开创了一种柔
性化的自动化生产方式。
目前,在生产中的应用较
多的焊接机器人大多是示教再
现型机器人,它对于不同的焊接
工作要求必须进行重新示教编
程,而且对于焊接工件的工装卡
具以及对焊缝的定位精度较高,
对于在焊接过程中产生的工件
热变形不具有自动调节的能力。
所以,希望焊接机器人能够根据
一定的传感信息而具有自动调
节、自主规划的功能,从而能够
实现焊接机器人的完全自主焊
接,这对于完成那些不适合人来
参与的焊接工作(核环境、太空
等)具有重要的意义。
焊缝的准确识别以及对焊
接机器人的初始焊接位置导引
对于自主焊接是一个不可或缺
的过程。因此,有许多专家学者
在进行这方面的研究,视觉传感
方式由于其有丰富的信息而受
到人们的青睐,本文主要论述在
没有外加辅助光源的条件下,利
用自然光作为光源的被动视觉
传感方式采集焊接场景图像,并
采用图形化编程工具 LabVIEW
对焊缝进行识别的原理及过程。
系统简介
本系统主要由硬件部分和
软件部分组成。其中硬件主要包
括焊接机器人、微型 CCD 视觉
传感器、PCI-1409 图像采集卡、
局域网通讯设施及主控计算机
等组成。软件部分主要包括两部
分,其一是采用 NI 公司的 IMAQ
VISION BUILDER 和 LABVIEW
图形化编程软件编制的图像采
集及分析处理部分,另一部分是
机器人的姿态读取及控制部分。
整个程序的主框架采用
LABVIEW 编制,其中对机器人
的通讯控制部分采用 VC++的动
态链接库方式实现,可以很方便
的在 LABVIEW 状态下调用。
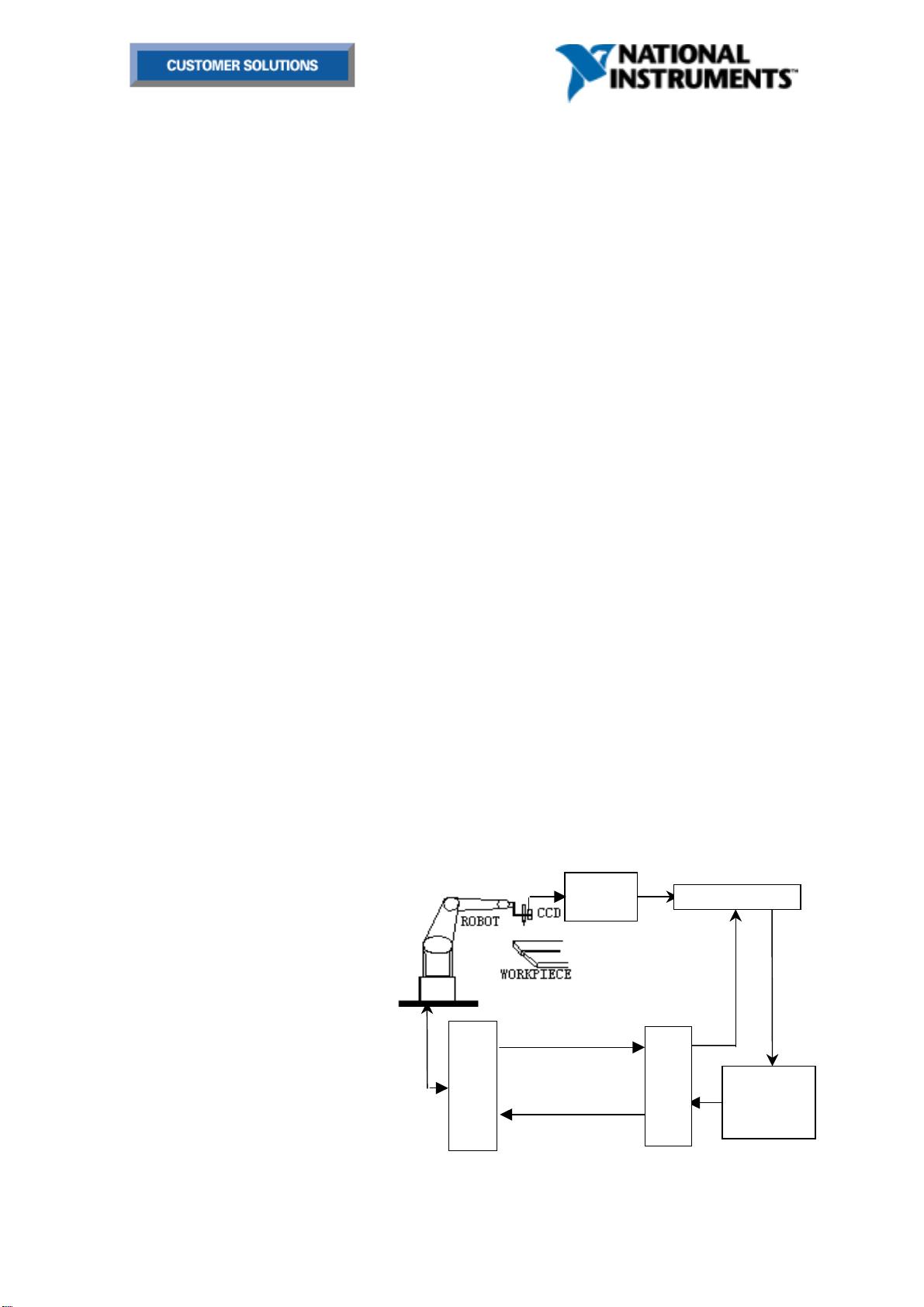
系统的原理框图如图 1 所
示。通过装夹在机器人手臂末端
的 CCD 摄像机获取工作场景的
图像信息,所采集的图像通过
Capture
image
Master computer
N
etwork address
MOTOCOM
Robot controller
Robot state
information
Extract
character
information
N
etwork address
Robot control
information
图
1
系统原理框图
电话:(021)6555 7838·传 真:(021)6555 6244
下载后可阅读完整内容,剩余7页未读,立即下载
2022-05-12 上传
2022-07-15 上传
2021-10-07 上传
2020-06-20 上传
2019-10-29 上传
2021-09-26 上传

weixin_38500047
- 粉丝: 9
- 资源: 979
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
