SIFT与SURF算法详解:尺度不变特征提取
需积分: 0 93 浏览量
更新于2024-06-30
收藏 1.89MB PDF 举报
"本文主要介绍了SIFT和SURF两种经典的图像特征检测算法,重点解析了SIFT算法的各个步骤,包括构建尺度空间、检测关键点、去除不良特征、赋予方向参数以及关键点描述等核心环节。"
SIFT(尺度不变特征变换)是由David Lowe提出的,是一种强大的图像特征检测算法,具有尺度不变性和旋转不变性。SIFT算法的主要目标是在不同的尺度和旋转角度下,找出图像中的稳定特征点,并为这些点提供独特的描述符,以便在不同的图像条件下进行匹配。
1. **构建尺度空间**:
SIFT算法首先通过构建尺度空间来处理图像,这是为了捕捉图像在不同分辨率下的特征。尺度空间通常通过高斯金字塔实现,每个层次代表不同的尺度,从粗略的概览到细致的细节。高斯差分尺度空间(DOG)通过计算相邻尺度的高斯图像的差分来寻找极值点,这些极值点可能对应于图像中的兴趣点。
2. **LoG近似DoG找到关键点**:
DOG(差分高斯)作为Log(高斯拉普拉斯)的近似,用于快速检测尺度空间中的局部极大值和极小值,这些点被认为是潜在的兴趣点。选择合适的尺度差(如2倍σ)以确保检测到的特征点具有良好的稳定性。
3. **除去不好的特征点**:
检测到的初步特征点可能并不都是稳定的,因此需要进一步的精炼。这包括去除边缘响应,检查邻域的梯度强度和方向稳定性,以及抑制相邻尺度和位置的重复特征点,以确保所选特征点的鲁棒性。
4. **给特征点赋值一个128维方向参数**:
对于每个保留下来的特征点,SIFT算法还会确定其方向。这是通过对特征点周围的梯度方向进行统计来完成的,最终为每个点分配一个主方向。此外,还根据这个方向信息生成一个128维的描述符向量,这个向量对旋转具有不变性。
5. **关键点描述**:
在确定了特征点的位置、尺度和方向后,SIFT会在每个点周围的小区域中采样梯度,形成一个描述符向量。这个向量能够描述特征点周围的局部纹理,且对光照变化、旋转和小的几何变形有很好的鲁棒性。
SURF(Speeded Up Robust Features)是SIFT的一种快速版本,它引入了Hessian矩阵来检测特征点,使用Haar小波加速计算,并优化了描述符的计算过程,以提高检测速度而不牺牲太多准确性。
总结起来,SIFT和SURF都是图像处理和计算机视觉领域中的重要工具,它们在特征检测和匹配方面有着广泛的应用,例如在图像配准、物体识别和3D重建等领域。理解并熟练运用这两种算法对于提升图像处理系统的表现至关重要。
为(x,y)处梯度的模值和方向公式。其中
L
所用的尺度为每个关键点各自所在的尺度。至此,图像的关键点已
经检测完毕,每个关键点有三个信息:位置,所处尺度、方向,由此可以确定一个SIFT特征区域。
梯度直方图的范围是0~360度,其中每10度一个柱,总共36个柱。随着距
中心点越远的领域其对直方图的贡献也响应减小.Lowe论文中还提到要使用高斯函数对直方图进
行平滑,减少突变的影响。
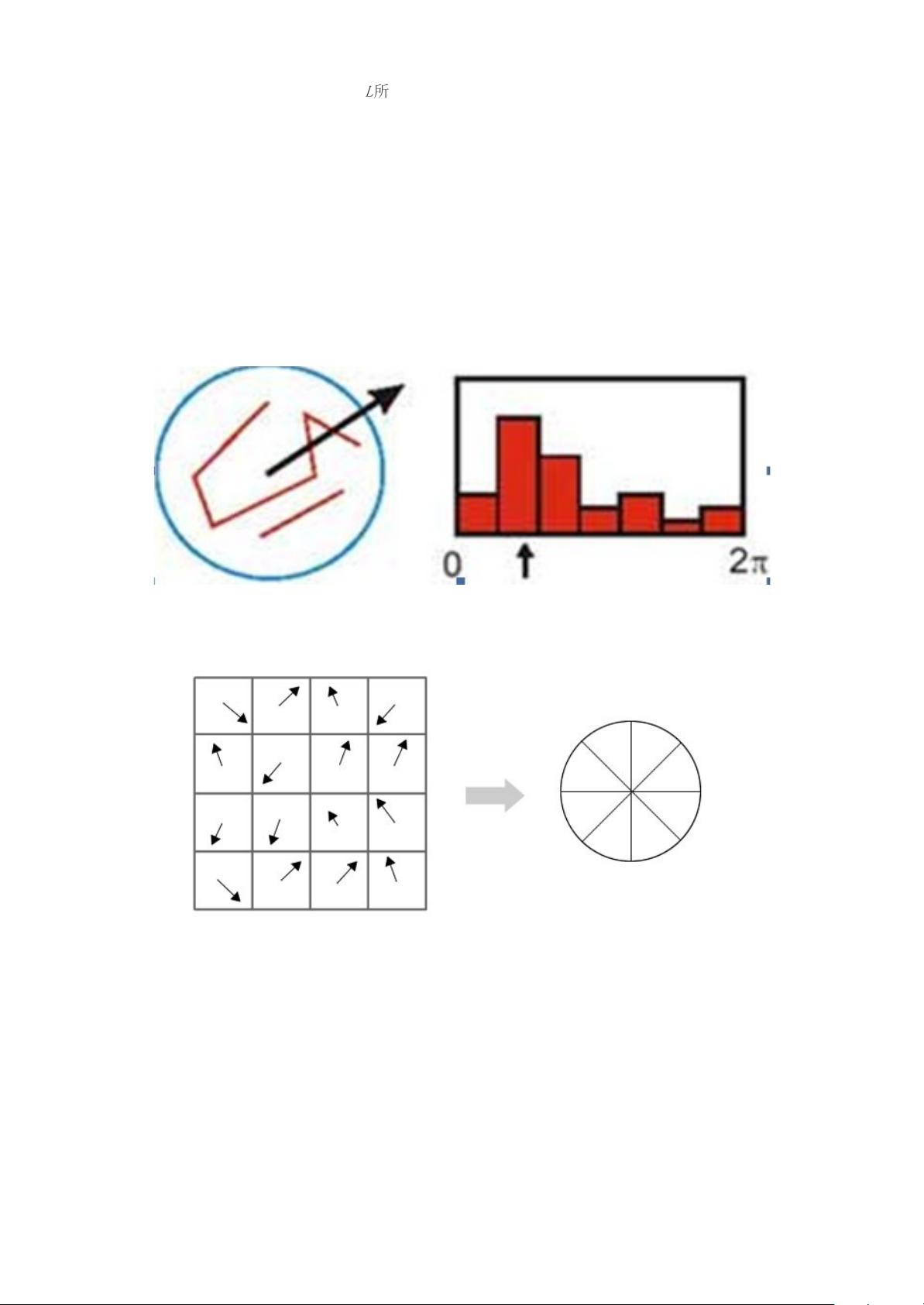
在实际计算时,我们在以关键点为中心的邻域窗口内采样,并用直方图统计邻域像素的梯度方向。梯度直方
图的范围是0~360度,其中每45度一个柱,总共8个柱, 或者每10度一个柱,总共36个柱。Lowe论文中还提
到要使用高斯函数对直方图进行平滑,减少突变的影响。直方图的峰值则代表了该关键点处邻域梯度的主方
向,即作为该关键点的方向。
直方图中的峰值就是主方向,其他的达到最大值80%的方向可作为辅助方向
由梯度方向直方图确定主梯度方向
该步中将建立所有scale中特征点的描述子(128维)
剩余27页未读,继续阅读
108 浏览量
2022-07-14 上传
373 浏览量
2022-09-22 上传
2022-09-22 上传
174 浏览量

乖巧是我姓名
- 粉丝: 35
- 资源: 343
 我的内容管理
展开
我的内容管理
展开







最新资源
- 3-en-raya-1era-parte-:连续3项任务San Pablo
- matlab代码sqrt-coa:用C++编写的布谷鸟优化算法(COA)
- zitiwenjian.rar
- 飞行员:我在硕士论文中创建了一个简单的项目。 它旨在显示用于移动应用程序开发的最流行的跨平台框架的异同。 还包括本机解决方案
- 兰大2018届计算机组成课程PPT
- Dollar:可在heroku中使用的单独的类似FB的应用程序,因为它已在烧瓶上完全堆满并起React
- junfai,matlab中rand的源码,matlab源码之家
- 食品饮料制造业解决方案.rar
- ElectricWow.9o51twf5ei.gahQfEe
- androidtest:android pritace
- react-native-toolbox:一组脚本来简化React Native开发
- 现代hy308手写板驱动 v9.8 官方版
- tns-template-vue:具有TypeScript,PostCSS,Tailwind,Vuex,Vue Router,Webpack等的NativeScript Vue模板
- 算折射率-计算算折射率的一款实用软件包括NK值
- 光线追踪:Projet d'imagerienumérique
- patrick-fulghum.github.io
