模糊PD控制算法在电动舵机系统中的应用
需积分: 40 162 浏览量
更新于2024-09-09
1
收藏 786KB DOC 举报
模糊PD算法
模糊PD算法是一种简单的控制算法,结合了模糊控制和PID控制的优点。该算法可以应用于电动舵机系统的控制,具有良好的稳定性和抗干扰能力。
模糊控制是智能控制的一个重要分支,与常规PID控制相比具有无需建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有一定的适应能力等优点,同时对噪声也具有较强的抑制能力。然而,模糊控制器本身没有积分环节,消除系统稳态误差的性能比较差,尤其是在变量分级不够多的情况下,可能会在平衡点附近产生小幅振荡。
为了改善模糊控制的稳态性能,可以将模糊控制算法与经典PID控制算法结合起来,构成模糊PID控制。模糊PID控制的特点是在大偏差范围内采用模糊控制,而在小偏差范围内转换成PID控制,来改善模糊控制的稳态性能。两者的切换是根据事先给定的偏差阈值来自动实现。
模糊PID混合控制的基本原理是将模糊控制和PID控制结合起来,利用模糊控制的非线性处理能力和PID控制的线性处理能力,来实现对电动舵机的控制。模糊控制部分负责处理大偏差范围内的控制,而PID控制部分负责处理小偏差范围内的控制。通过这种方式,可以提高系统的控制效果和稳定性。
模糊控制原理是建立在模糊推理基础上的一种非线性控制策略。它通过模糊语言表达了人们的操作经验以及常识推理规则。模糊控制系统一般按输出误差及变化率来实现对工业过程的控制。其控制器基本结构包括模糊化、模糊规则基、模糊推理、解模糊化和输入输出量化等部分。
模糊控制器可以由DSP实现,通过A/D、D/A转换接口与模拟环节连接,构成闭环反馈控制系统。模糊控制器的设计可以通过离线转化为一个查询表,存储在计算机中供在线控制时使用。这种模糊控制器结构简单、使用方便,是最基本的一种形式。
在本文中,我们选取单变量二维模糊控制器,即选取误差e和误差变化率ec为模糊控制。这种控制器可以实时地对电动舵机的控制,具有良好的控制效果和稳定性。
模糊PD算法是基于模糊控制和PID控制的结合,可以应用于电动舵机系统的控制,具有良好的稳定性和抗干扰能力。该算法可以实时地对电动舵机的控制,提高系统的控制效果和稳定性。
0引言
电动舵机系统是由若干部件组成的随动系统,其中电动舵机是执行元件。随着材料学、电子
技术及制造工艺水平的发展和提高,电动舵机得到很大的发展,其可靠性和可维护性都好于其
它类型的舵机,同时其控制方式也由模拟控制向数字控制发展。近年来,DSP 技术的发展为电
动舵机的数字化控制提供了有力的支持,由其构成的数字控制系统可以很好地实现模拟控制,
很难甚至无法实现复杂的控制算法。模糊控制是智能控制的一个重要分支,与常规 PID 控制
相比具有无需建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有一定的适
应能力等优点,同时对噪声也具有较强的抑制能力。但是模糊控制器本身没有积分环节,消除
系统稳态误差的性能比较差,尤其在变量分级不够多的情况下,还可能会在平衡点附近产生小
幅振荡。可以将模糊控制算法与经典 PID 控制算法结合起来,构成模糊 PID 控制来改善系统
的控制效果。本文则选用了模糊 PID 混合控制来实现对电动舵机的控制。
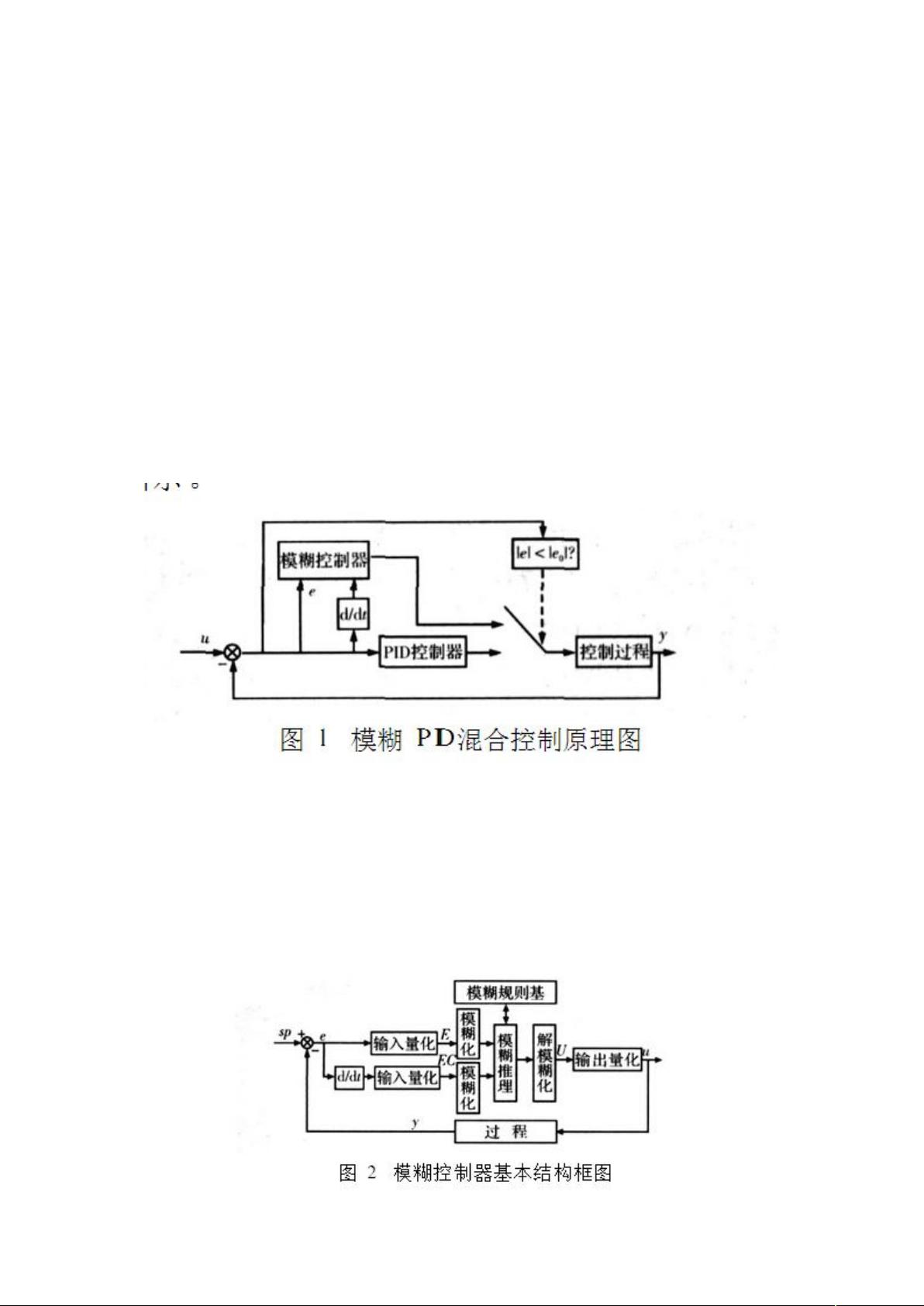
1模糊 PID 混合控制基本原理
模糊 PID 混合控制的特点是在大偏差范围内采用模糊控制,而在小偏差范围内转换成 PID 控
制,来改善模糊控制的稳态性能。两者的切换是根据事先给定的偏差阈值来自动实现。其原
理图如图 1 所示。
2模糊控制原理及控制器设计
211模糊控制原理
模糊控制是建立在模糊推理基础上的一种非线性控制策略。它通过模糊语言表达了人们的
操作经验以及常识推理规则。模糊控制系统一般按输出误差及变化率来实现对工业过程的
控制。其控制器基本结构如图 2 所示。其中包括模糊化、模糊规则基、模糊推理、解模糊
化和输入输出量化等部分。模糊控制系统的结构与一般的数字控制系统基本相似。模糊控
制器可由 DSP 实现,通过 A/D、D/A 转换接口与模拟环节连接,构成闭环反
馈 控 制
系 统 。
图 中
E 、 EC
分 别 是
控 制 偏
差 e 和
偏 差 变
化 率
下载后可阅读完整内容,剩余4页未读,立即下载
270 浏览量
点击了解资源详情
点击了解资源详情
175 浏览量
1089 浏览量
145 浏览量
264 浏览量
150 浏览量
118 浏览量

N-Degree
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- django-dashing:django-dashing是Django的可定制的模块化仪表板应用程序框架,用于可视化有关项目的有趣数据。 受仪表板框架启发
- 7z,没有广告的解压工具
- filepond-plugin-file-poster:将海报图像添加到文件中
- HTML5 canvas实现生物圈里的细胞运动动画效果源码.zip
- 简码
- Bikcraft-wordpress
- RentACarV1BackEnd
- currency-parser:金融.ua汇率
- 数据恢复工具 壁虎数据恢复 v3.4
- html5 canvas实现响应鼠标拖动的流体图片动画特效源码.zip
- 盖塔皮
- split:基于机架的AB测试框架
- dimmer-button
- PR_K._语音识别_语音性别识别_
- ETL_Project
- bookbrainz-api
