IND570/IND570XX电子称重仪表用户手册概览
需积分: 50 120 浏览量
更新于2024-07-16
收藏 15.07MB PDF 举报
"IND570/IND570XX电子称重仪表用户手册提供了全面的仪表介绍、规格、配置选项以及操作指南。手册详细介绍了IND570仪表的多种功能,包括模拟传感器和数字传感器的秤台兼容性,如IDNet秤台、POWERCELL传感器、SICSpro协议的RBrick秤台以及PowerDeck数字秤台。此外,还涵盖了仪表的各种选件,如离散输入/输出、以太网连接、串口、PLC接口和特定的应用软件包。手册中也详细阐述了操作界面,包括显示风格、前面板按键、用户安全等级设置以及数据输入方法,如数据输入模式、特殊符号输入和全球字符输入。用户可以学习如何进行清零、去皮、打印、累加、单位切换等基本操作。"
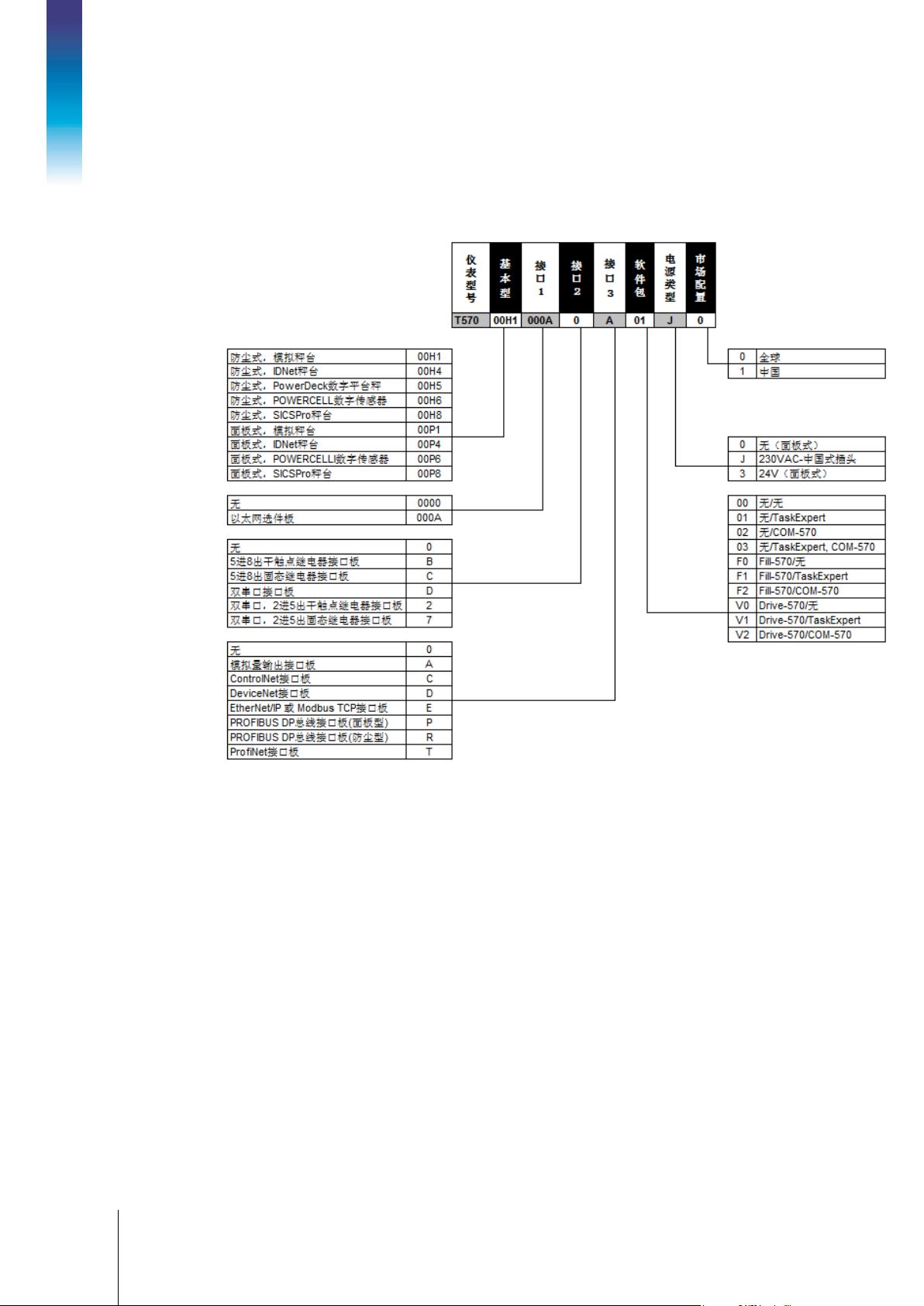
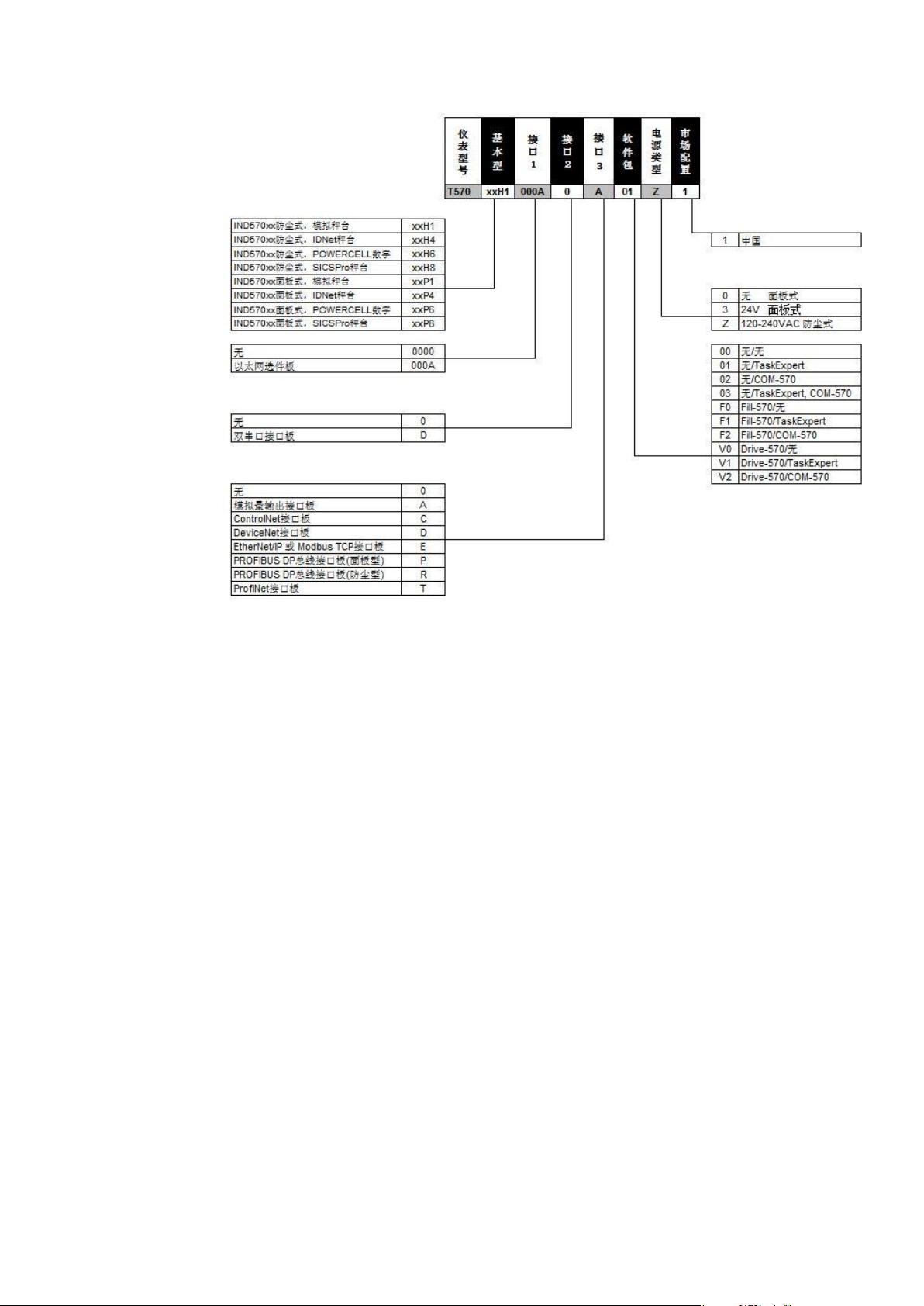
IND570/IND570XX电子称重仪表是一款高级的工业级称重设备,其用户手册详尽地解释了仪表的各个方面。在"引言"部分,手册给出了IND570的概述,包括不同类型的型号和其标准性能特点。这部分还列出了仪表的规格,供用户了解其技术参数,并提供了一份检验和检查清单,确保安装和使用前的准备工作无误。手册中的"型号标识"和"结构尺寸"章节,帮助用户理解仪表的物理特性和安装要求。
仪表的兼容性是其关键特性之一,IND570能与各种传感器配合使用,包括模拟传感器和数字传感器。它支持IDNet秤台,一个专有的通信网络,以及POWERCELL数字传感器,提供高精度的称重数据。另外,SICSpro协议的RBrick秤台和PowerDeck数字秤台也为用户提供了不同的选择。
手册的"选件"部分展示了IND570的扩展能力,如离散输入/输出模块用于控制外部设备,以太网选件允许远程监控和数据传输,而COM2/COM3串口和PLC接口则方便与其他自动化系统集成。此外,还提供了一系列应用软件包,如TaskExpert和InSite SL配置工具,增强了仪表的功能和灵活性。
在"操作"部分,用户可以学习如何设置和使用仪表。"用户安全等级设置"允许设定不同级别的访问权限,确保只有授权人员能进行关键操作。"仪表操作"章节指导用户如何启动和使用仪表,包括HMI(人机接口)的使用,如导向键、软键、秤功能键以及字母数字键的交互方式。此外,手册详细说明了数据输入过程,包括数据输入模式、特殊符号和全球字符的输入,使用户能够高效地输入和处理数据。
"主窗口"和"基本功能"部分介绍了仪表的显示屏和核心功能。用户可以学习如何进行清零、去皮、打印、累加、单位切换和10倍扩展显示等常见操作,这些都是日常称重任务中不可或缺的功能。通过这份用户手册,用户将能够充分利用IND570/IND570XX电子称重仪表的强大性能,实现精确、高效的称重管理。
14
METTLER TOLEDO IND570 用户手册
30073969|02|3/2017
IND570 规格
通讯
标准接口
串口 COM1(RS-232/RS-422/RS-485),波特率从
300~115,200,仅 IND570POWERCELL 版本的 COM1 带隔离
串口 COM4(RS-232,仅 IND570POWERCELL 标配),波特率从
300~115,200,隔离串口
USB 主机端口:Type A 连接器,在 100mA 时+5V,不支持在危险区使
用
选件接口
以太网端口: 10 Base-T 双绞以太网,100 Base-TX 双绞快速以太网
COM2 串口:RS-232,波特率从 300~115,200
COM3 串口:RS-232/RS-422/RS-485,波特率从 300~115,200
支持的协议
USB 输入:ASCII 字符(条形码,键盘),即时文件导入
USB 输出:需求输出;报表打印;即时文件导出
串行输入:ASCII 字符,CTPZ(清除,去皮,打印,清零)的 ASCII 命
令,SICS(0 级和 1 级,某些能支持 2 级命令),远程显示,共享数
据服务器访问
串行输出:连续和需求输出;SICS 协议;报表打印;
ARM100 远程输入/输出模块。任选的 COM-570 应用软件可以用于
法定串行协议。
以太网输入:用于 CTPZ(清除,去皮,打印,清零)的 ASCII 命
令;SICS(0 级和 1 级);远程显示;共享数据服务器访问
以太网输出:连续和需求输出;报表打印
PLC 接口
支持单个接口:模拟量输出,ControlNet,DeviceNet™,以太网/
IP,Modbus TCP,PROFIBUS
®
DP,PROFINET
®
认证
计量认证:
美国:NTEP Class II,100,000d;Class III/IIIL,10,000d;CoC #13-
123
加拿大:Class II,100,000d;Class III,10,000d;等级 IIIHD,
20,000d;AM-5933
欧洲:OIML R76 等级 II,批准的分度由秤台确定;Class III 和 IIII
10,000e;T11060/TC8458
安全认证:UL,cUL,CE
防爆认证(仅针对 IND570xx):
中国防爆认证证书号:GYB16.1824X
防爆标志: Ex ic nA [ic] IIB T5 Gc
Ex tD A22 IP65 T85°C
已获得的型批证书号 2013F341-32 和 2016F003-32
模拟秤台版本为中国准确度等级 Class III,(0~10000)d


剩余410页未读,继续阅读
2021-08-12 上传
215 浏览量
283 浏览量
2755 浏览量
点击了解资源详情
2024-11-05 上传

冰~山泉
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- vs2015环境下MFC多线程编程示例教程
- 实时掌握知乎热点:自动化爬取工具
- Everything文件搜索工具V1.4.1正式版发布,索引速度飞跃
- C++数据结构源代码解析与应用
- 掌握Firebug与Firepath:浏览器开发的利器
- Android UI界面绘制原理深度解析
- PHP常用方法整理:字符串处理与数组操作技巧
- IOS平台下实现WiFi Socket通信的方法
- Android 4.X 开发实战源代码详解手册
- Bootstrap布局示例演示与学习指南
- 官方已停服,获取Python 3.6.6 Windows安装包
- 多线程C++实现的SFML和ImGui Mandelbrot集渲染器
- ScpToolkit v1.6.238.16010:电脑版PS3手柄驱动安装指南
- 快速获取FlexViewer源码包,免登录下载
- Redis Desktop Manager for Windows压缩版评测
- Delphi临时文件清理工具Clean_CompileFile
