AMARSi NAO自适应控制模块集成与原型架构探讨
需积分: 10 95 浏览量
更新于2024-07-23
收藏 1.47MB PDF 举报
本篇文档是关于"NAO自适应控制模块架构"的研究报告,由欧盟第七框架计划(EUFP7)资助的AMARSi项目(Adaptive Modular Architectures for Rich Motor Skills,ICT-248311)的一部分,D6.1技术报告,发表于2011年10月,历时18个月。这份报告由赫伯特·雅各布斯大学的赫伯特·雅各布斯、比勒费尔德大学的乔赫恩·斯泰尔和菲利克斯·莱因哈特撰写,旨在概述AMARSi项目中的架构贡献,并在与先验概念架构的视角下进行讨论。
报告首先回顾了项目内的现有架构,重点关注那些在早期交付物中有详细记录的部分,强调了它们的简要概述。同时,报告也提及了来自合作伙伴的独立或非AMARSi相关的相关工作,这些工作对理解整个领域的架构发展起到了补充作用。
核心目标之一是在认知水平上集成大量模块,实现反应迅速且复杂的(pre-cognitive)行为。M.6.1部分详细阐述了开发出的原型架构及其相对优缺点,通过D6.1交付物的方式进行了验证。报告还着重探讨了架构设计的基本问题,为丰富运动技能架构提出了一种领域特定的语言。
通过重新表述AMARSi的典型架构,这份报告尝试提供一个通用框架,以便理解和评估不同模块如何协同工作,以及如何根据实际需求进行适应和优化。此外,报告的公开性(Dissemination level: Public)表明其研究成果具有广泛的传播价值,可为NAO机器人系统的设计者、研究人员和开发者提供宝贵的参考材料。
总结来说,这份报告不仅提供了NAO自适应控制模块架构的深入分析,还为设计和实施自适应运动技能的模块化系统提供了关键理论和实践指导,对于理解和改进人机交互、机器人行为控制具有重要意义。
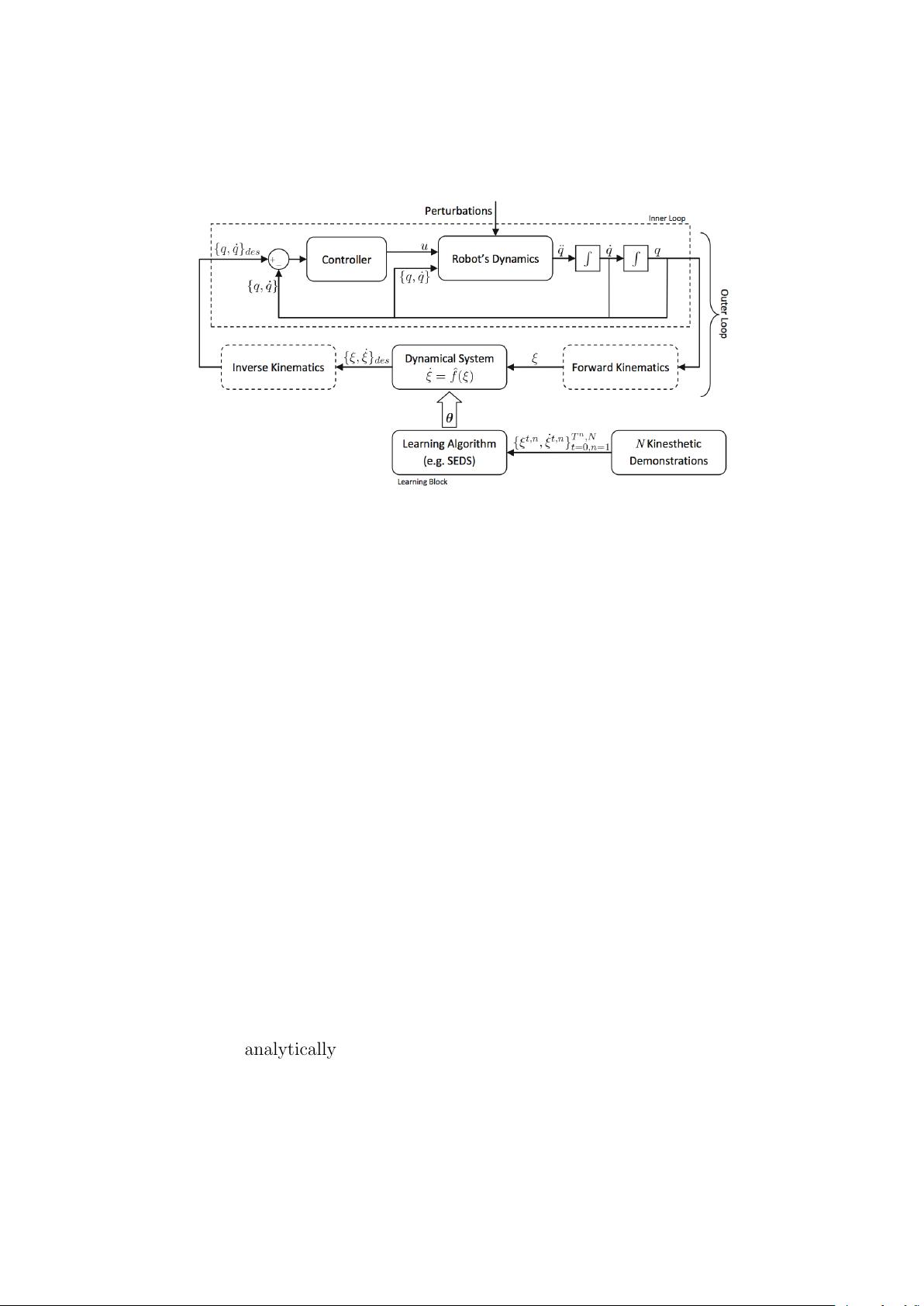
Figure 6: Embedding the SEDS learning module in a basic control architec-
ture (taken from [5]).
which one assumes that motions are driven by an autonomous dynamical
system. In other words, motions are here assumed to follow an ODE that
is time-invariant. Time-invariance is advantageous in that it no longer re-
quires heuristics for time-rescaling when the motion is perturbed. However,
time-invariance in non-linear dynamical systems induces issues of stability
that time-dependent techniques avoid. Methods are developed for learning
an autonomous DS that are asymptotically stable at an attractor. These are
applied to control point-reaching movements. Learning proceeds from a few
demonstration trajectories, by approximating the (assumed ground truth)
ODE via mixtures of Gaussians [6, 7, 8], under strict constraints to ensure
stability, as detailed in Chapter 3 of Deliverable 4.1. The autonomous DS is
embedded into the architecture shown in Figure 6 which provides the infras-
tructure for le arning (supply of training data) and robot control (kinematic
transformations and proprioceptive feedback). The architectures displayed
in Figure 2 and Figure 6 share a common layering of control levels and both
include a kinesthetic, human-robot interaction phase.
Two different learning methods have been employed and analyzed:
• Learning the model parameters (means and covariance matrices of par-
ticipating Gaussians) by a constrained nonlinear optimization method
termed SEDS (stable estimator of dynamical systems) leads to a model
with analytically assured global stability (a unique fixed point attractor
at the reaching target location) [7]
• Learning the model parameters via EM, achieving stability in a sub-
10
剩余60页未读,继续阅读
2021-08-13 上传
2022-11-08 上传
2018-01-29 上传
2021-04-27 上传
2020-12-31 上传
2020-09-19 上传
2022-09-14 上传
2022-07-14 上传
2020-12-26 上传

xyxoswald
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- SSM Java项目:StudentInfo 数据管理与可视化分析
- pyedgar:Python库简化EDGAR数据交互与文档下载
- Node.js环境下wfdb文件解码与实时数据处理
- phpcms v2.2企业级网站管理系统发布
- 美团饿了么优惠券推广工具-uniapp源码
- 基于红外传感器的会议室实时占用率测量系统
- DenseNet-201预训练模型:图像分类的深度学习工具箱
- Java实现和弦移调工具:Transposer-java
- phpMyFAQ 2.5.1 Beta多国语言版:技术项目源码共享平台
- Python自动化源码实现便捷自动下单功能
- Android天气预报应用:查看多城市详细天气信息
- PHPTML类:简化HTML页面创建的PHP开源工具
- Biovec在蛋白质分析中的应用:预测、结构和可视化
- EfficientNet-b0深度学习工具箱模型在MATLAB中的应用
- 2024年河北省技能大赛数字化设计开发样题解析
- 笔记本USB加湿器:便携式设计解决方案
