Beckhoff TwinCAT技术详解:实时控制系统与HMI
需积分: 10 9 浏览量
更新于2024-07-18
收藏 2.14MB PPT 举报
"本文主要介绍了BeckHoff的HMI技术,特别是其TwinCAT系统的工作原理和技术特点。TwinCAT是BeckHoff公司的一款基于PC的自动化控制软件,它能够将标准的Windows操作系统转化为实时操作系统,支持浮点单元,并提供广泛的硬件兼容性和开放的通讯能力。"
在深入理解BeckHoff的HMI技术之前,首先要明确TwinCAT的核心功能。TwinCAT作为一个自动化软件包,包含了实时内核、I/O数据采集、顺序控制(软PLC)、运动控制(软运动控制)以及通讯(如ADS)等多个方面。这一软件在Windows NT/2000/XP、嵌入式Windows NT/XP和CE.NET等平台上运行,具备硬实时环境下的高性能。
TwinCAT的工作原理可以分为以下几个关键点:
1. **控制的演变**:从传统的机械和电器控制逐渐发展为电子化和软件化的控制方式,如并行连接演变为现场总线,通讯方式也从间接转变为直接访问。
2. **TwinCAT的结构**:TwinCAT并不改变原有的Windows系统,而是通过在标准Windows上运行,实现自动化控制。它利用PC的资源,支持多种主流操作系统,并且可以与办公网络无缝集成。
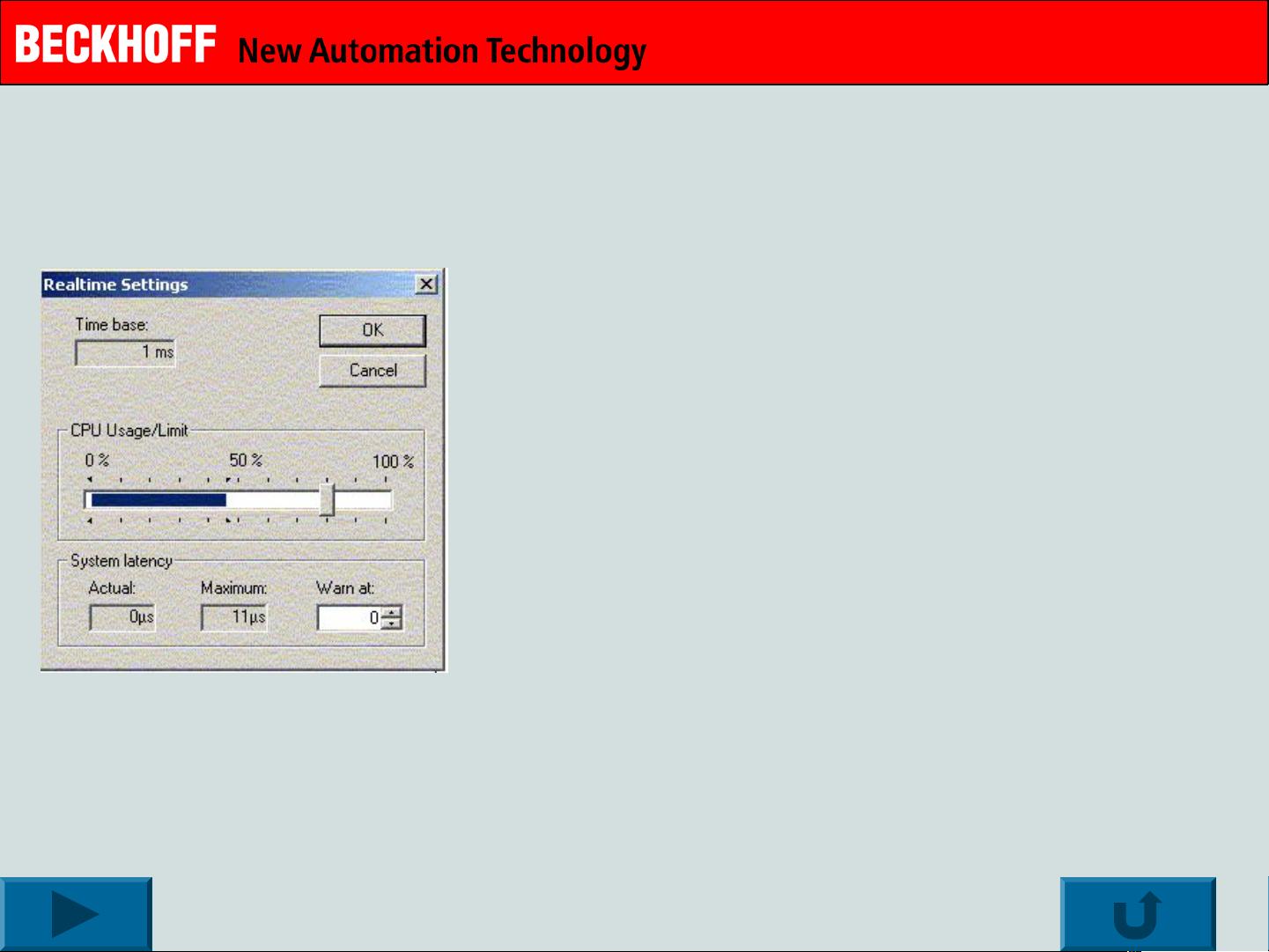
3. **实时内核**:TwinCAT的实时性能非常出色,循环时间可以达到50微秒,具有优先级调度功能,确保任务的快速响应。在某些配置下,如PIII处理器,其反应时间小于15微秒。
4. **I/O和通讯**:TwinCAT支持广泛的I/O设备和通讯协议,如Ecat现场总线,能够实现高效的数据交换和设备控制。
5. **开放性和可扩展性**:基于PC平台,TwinCAT可以方便地接入各种硬件,利用OCX和Dll访问Windows用户界面,同时通过TCP/IP进行远程访问,增强了系统的灵活性和可扩展性。
6. **编程和HMI**:TwinCAT提供了专门的编程工具和人机界面(HMI),使得基于PC的自动化控制更加直观和便捷。
BeckHoff的TwinCAT系统是现代工业自动化领域的重要组成部分,它以其强大的实时性能、灵活的硬件适应性和开放的通讯特性,广泛应用于各种自动化工程中,尤其是在运动控制和精密制造等领域。通过TwinCAT,工程师可以设计出高效、可靠的自动化解决方案,满足不同行业的复杂需求。
5
TwinCAT 的原理
BECKHOFF 技术特点
•
由 Beckhoff 开发
•
无需 PC 外的其它硬件
•
循环时间可短至 50 微秒
•
强制优先排序
•
反应时间 < 15 微秒 (PIII)
•
对 Windows 可调节实时率 ( 专利权 )
•
如果反应时间过长则发信息
TwinCAT 实时核的原理
剩余23页未读,继续阅读
405 浏览量
点击了解资源详情
2022-09-22 上传
2021-09-30 上传

java_administratot
- 粉丝: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- Verilog实现的Xilinx序列检测器设计教程
- 九度智能SEO优化软件新版发布,提升搜索引擎排名
- EssentialPIM Pro v11.0 便携修改版:全面个人信息管理与同步
- C#源代码的恶作剧外表答题器程序教程
- Weblogic集群配置与优化及常见问题解决方案
- Harvard Dataverse数据的Python Flask API教程
- DNS域名批量解析工具v1.31:功能提升与日志更新
- JavaScript前台表单验证技巧与实例解析
- FLAC二次开发实用论文资料汇总
- JavaScript项目开发实践:Front-Projeto-Final-PS-2019.2解析
- 76云保姆:迅雷云点播免费自动升级体验
- Android SQLite数据库增删改查操作详解
- HTML/CSS/JS基础模板:经典篮球学习项目
- 粒子群算法优化GARVER-6直流配网规划
- Windows版jemalloc内存分配器发布
- 实用强大QQ机器人,你值得拥有
