




方向性靶标与多约束优化提升双目相机标定精度与稳定性
版权申诉
17 浏览量
更新于2024-06-26
收藏 2.14MB DOCX 举报
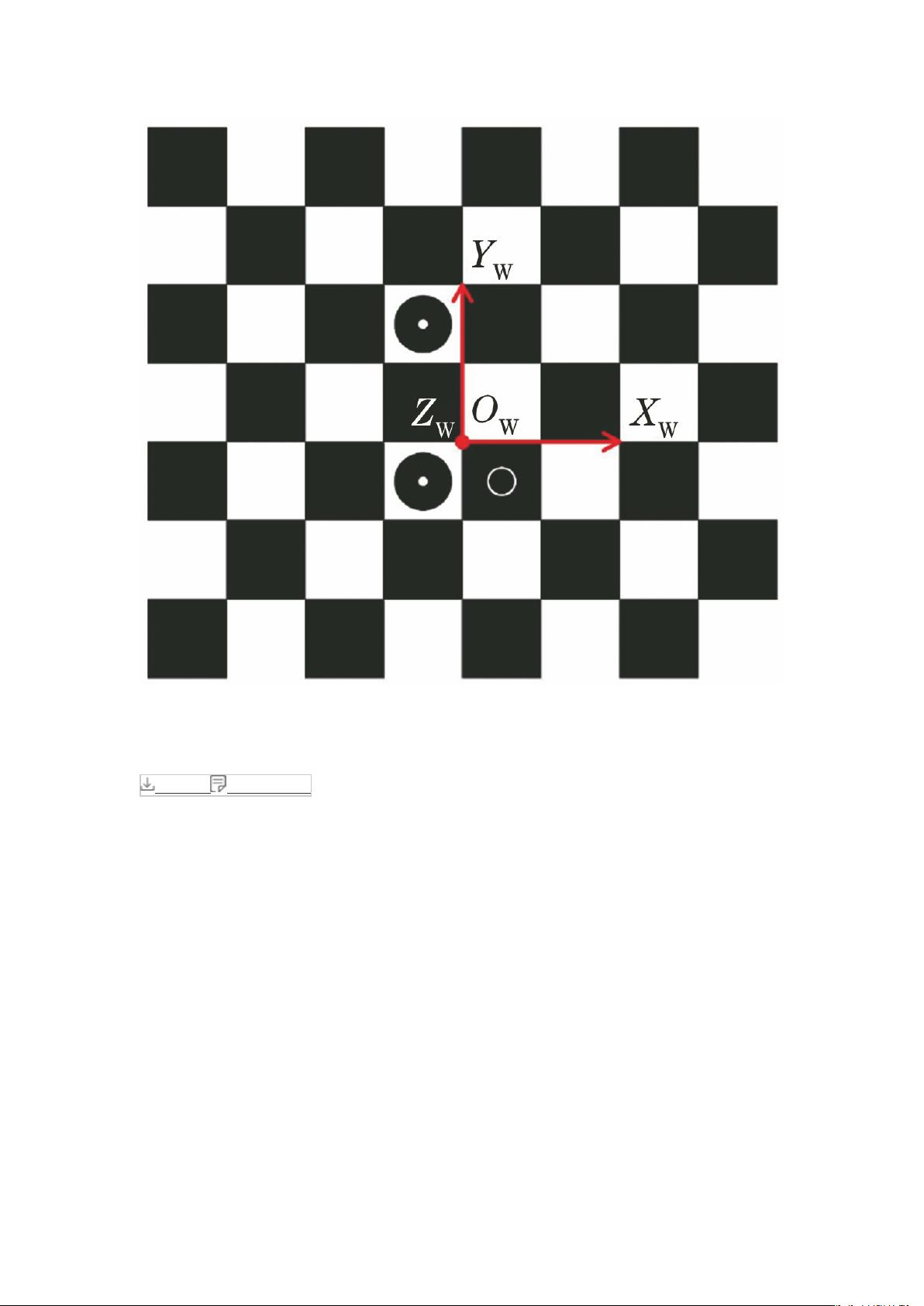
本文档探讨了一种创新的双目相机标定技术,该技术主要依赖于方向性靶标和多约束优化策略。传统标定方法如张氏法主要依赖于特定的棋盘或平面靶标,但它们在处理部分遮挡或复杂光照条件下可能会导致匹配问题。针对这些问题,研究者提出了一个新型的方向性平面靶标设计。
这个方向性靶标的核心特点是它不仅可以提供二维坐标信息,还能通过编码标识出其旋转方向。这样即使在双目相机只捕捉到靶标的一部分时,也能通过匹配同名点来实现精确标定。在标定过程中,研究人员引入了天顶角和方位角这两个参数,它们分别表示平面靶标相对于相机的仰角和水平角。通过选择那些在不同位置下靶标姿态变化明显的图像作为标定图像,这种方法显著提升了标定结果的鲁棒性和稳定性。
进一步,论文构建了一个多维度约束的双目相机参数优化模型,考虑了靶标的三维几何信息,如深度信息。这种优化模型不仅能够提高标定精度,还能够更好地适应实际场景中的复杂光线和遮挡条件。实验结果对比表明,相比于传统的张氏标定方法,该方法在标定结果的稳定性和精度上都有显著提升。
为了验证新方法的有效性,研究人员对标准量块进行了多次测量,结果显示所提出的双目相机标定方法不仅在理论上有优越性,而且在实际应用中也表现出良好的性能。总结来说,这项工作为双目相机在工业自动化、机器人视觉以及其他需要高精度视觉定位的领域提供了更为稳健和精确的标定解决方案。
下载后可阅读完整内容,剩余17页未读,立即下载
2299 浏览量
226 浏览量
232 浏览量
2023-02-23 上传
118 浏览量
2023-02-23 上传
2025-04-10 上传
2022-12-17 上传
2021-09-14 上传

罗伯特之技术屋
- 粉丝: 4599
 我的内容管理
展开
我的内容管理
展开








最新资源
- 深入理解Libft库:C语言开发者的必备工具
- 深入理解 AJAX 实例解析与应用
- 确保Windows 7兼容:HFS Explorer安装组件详解
- HP 4350打印机驱动下载与安装指南
- HTML前端测试4的压缩包子文件解析
- 深入理解Pushlet技术:CookBook翻译与注解
- 轻松制作安全启动U盘 - FbinstTool使用攻略
- 《微机原理与接口技术》课程全面解析课件
- Mars-EP1C6-F主板上的IIC总线读写测试
- JavaScript开发的GaleriaWeb项目解析
- 网页绘图全攻略:JS实现线条、多边形与艺术字
- 打造个性化个人工具箱软件下载
- Java图像处理实战:直方图均衡化与边缘检测技巧
- jqGrid v3.6+ 简体中文包发布,源码工具下载
- 首发:i5128量产修复工具PDX16 v1.34版
- Java新手入门基础教程






















