无人机集群人体动作捕捉:ICCV2019研究突破
需积分: 13 93 浏览量
更新于2024-09-05
收藏 7.09MB PDF 举报
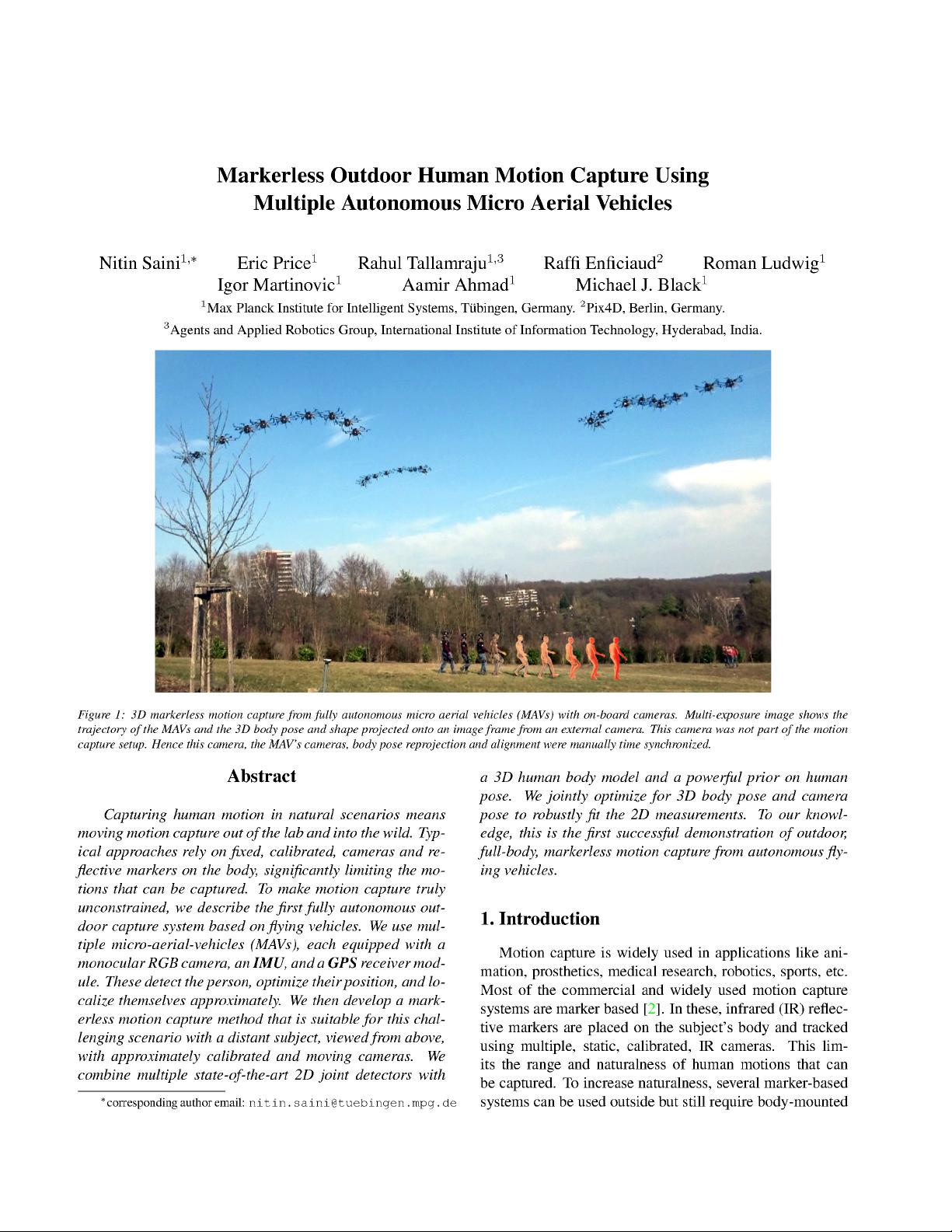
"本文介绍了ICCV2019会议上的一篇关于使用多个自主微型无人机进行无标记户外人体动作捕捉的研究论文。该技术结合了无人机集群、三维人体重建和深度学习模型,实现了从空中视角全自动捕捉人体运动。"
这篇文章是ICCV2019年大会上的一篇创新性工作,主要探讨了如何利用多个自主微型无人机(MAVs)进行无标记的户外人体动作捕捉。这项技术的核心目标包括以下几个方面:
1. **无人机集群控制**:研究中涉及的关键技术之一是无人机的自主飞行与协同操作。通过精确的飞行控制算法,多架无人机能够协同工作,从不同角度捕捉人体动作,提供丰富的视角信息。
2. **相机外参估计与人体三维定位**:在户外环境中,无人机需要准确地估计其相对于被捕捉对象的相机外参,以及确定人体在三维空间中的位置。这涉及到复杂的传感器融合和定位算法,以便在不稳定的飞行条件下获取可靠的数据。
3. **二维关节检测与三维身体模型拟合**:从无人机拍摄的图像中,通过深度学习模型进行人体关节的检测,然后将这些二维关节信息转化为三维空间中的身体模型。这个过程可能需要对抗遮挡、光照变化和其他环境因素的影响。
4. **全自动人体运动捕捉**:研究团队首次展示了从空中无人机系统完全自动捕捉人体运动的可能性,无需人工干预或标记物,极大地扩展了动作捕捉的应用场景和实用性。
5. **精度评估与比较**:虽然目前的精度尚未达到商业标记式系统的水平,但这是朝着集成解决方案迈进的实用步骤。他们将所提出的3D姿势与多IMU套装和SIP方法计算出的参考数据进行了比较,以评估其性能。
此外,该研究还关注了与室外移动相机相关的动作捕捉技术。例如,Hasler等人和后续的工作在手持未同步相机和已同步相机的情况下恢复人体姿态。这些方法为解决户外动态环境中的动作捕捉问题提供了基础。
为了促进进一步的研究和应用,作者们提供了代码和数据集,可在https://github.com/robot-perception-group/Aircap_Pose_Estimator获取。这为研究者提供了实现和改进这种技术的平台。
这篇ICCV2019的文章不仅提出了一个新颖的无人机集群动作捕捉系统,还为户外环境中的动作捕捉技术开辟了新的研究方向。它将无人机技术、计算机视觉和深度学习模型紧密结合起来,有望在未来的人体运动分析、体育训练、影视制作等领域发挥重要作用。
下载后可阅读完整内容,剩余9页未读,立即下载
2019-11-15 上传
2021-03-10 上传
2021-02-05 上传
2023-01-19 上传
2021-03-10 上传
2019-11-07 上传
2021-05-11 上传
2019-11-26 上传

上进的小菜鸟
- 粉丝: 71
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- Python库 | python-gitlab-0.14.tar.gz
- bmed-4460-6460:生物图像分析课程的源代码(BMED 44606460)
- rpgit-system:rpgit系统
- ListBox.zip源码Labview个人项目资料程序资源下载
- sympathetic-synth:交感合成器系统Mk1
- launch-extension-context-data-tools:提供操作和一些工具,使您可以使用contextData变量进行跟踪
- Look4:基于MVI,附近连接API和Hilt的约会应用
- TWB:TWB 网络应用程序
- fps沙箱
- Python库 | python-ftx-0.1.0.tar.gz
- GenGen:通用的世代系统
- 感言
- lunchlady:一个基于NodeJS的愚蠢,简单的无后端CMS
- 资源fastjson-get-post.zip
- sssnap-api:已弃用 - 用于 sssnap 的 REST JSON API
- Excel模板开票申请单模板.zip
