80C51单片机控制的自动避障电动小车设计
版权申诉
174 浏览量
更新于2024-06-25
收藏 5.42MB DOC 举报
"这篇资源是一篇关于电动智能小车的毕业设计论文,主要涉及80C51单片机的应用,以及如何利用光电检测器、PWM调速技术来实现小车的自动化功能。该设计利用超声波传感器进行障碍检测,实现自动避障和速度控制,同时具备自动记录时间和里程、速度测量、自动寻迹和寻光的能力。系统设计中采用了新型显示芯片以提升信息显示的效率和质量。"
在设计这个电动智能小车的过程中,80C51单片机扮演了核心控制器的角色。80C51是一款经典的八位微处理器,具有丰富的I/O端口和内置RAM与ROM,使得它在各种控制系统中被广泛应用。其易用性和灵活性使得它成为实现复杂控制逻辑的理想选择,尤其是在这种需要实时处理数据和控制电机运行的场合。
其中,关键的技术之一是通过编程来控制小车的速度。这通常涉及到对电机驱动电路的PWM(脉宽调制)信号的控制。PWM是一种有效调节电机转速的方法,通过改变脉冲宽度来改变平均电压,从而改变电机的转速。通过对PWM信号的精确控制,可以实现电动小车的精确速度调整,使其能够在遇到障碍时快速反应并调整行驶速度。
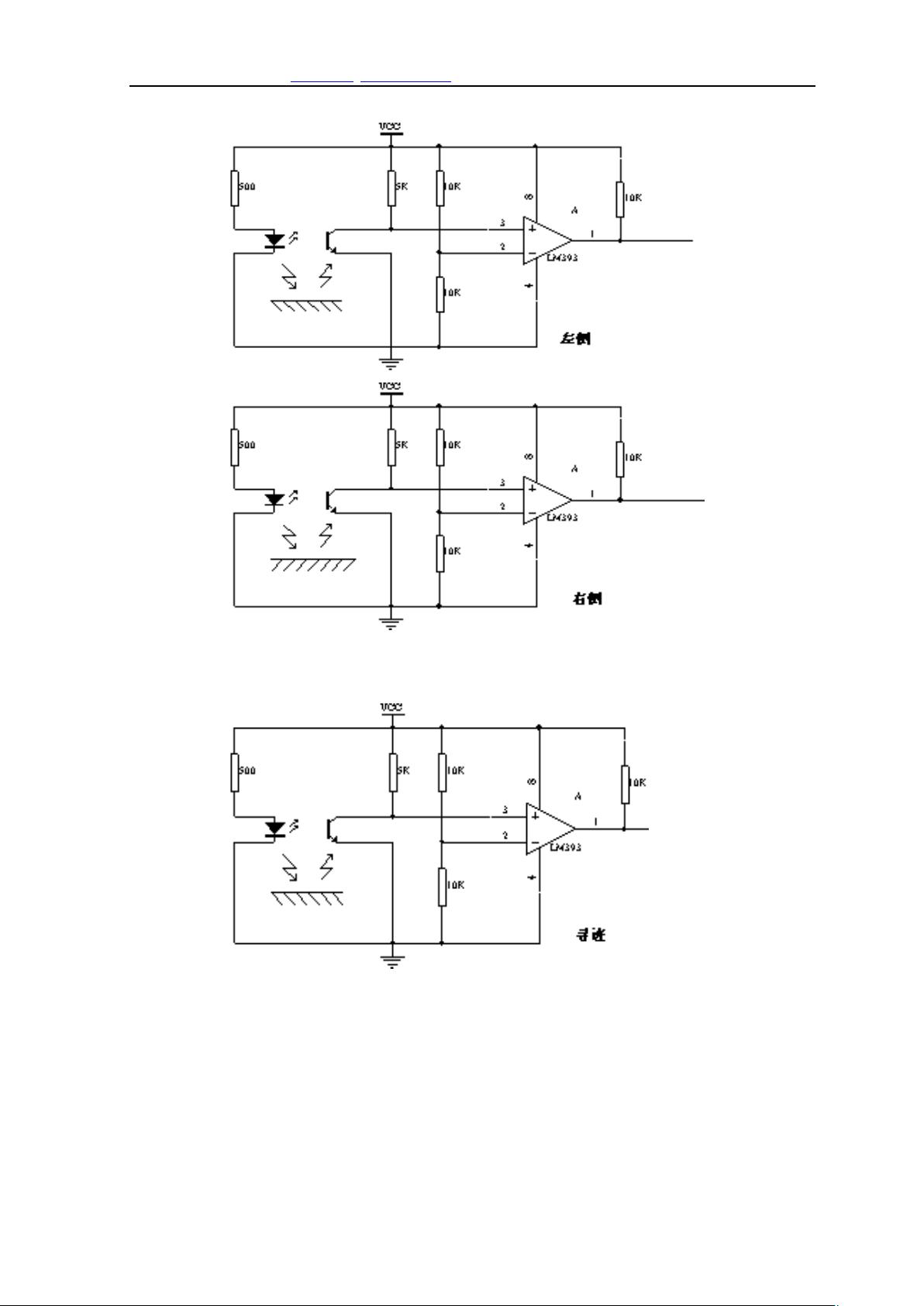
此外,传感器的有效应用是实现小车自动化功能的关键。超声波传感器能发射和接收超声波,通过计算回波时间差来判断前方障碍物的距离,从而实现自动避障功能。同时,可能还使用了光电检测器来检测地面的标记或光线变化,帮助小车进行自动寻迹。这些传感器的数据会被80C51单片机实时处理,以决定小车的行驶方向和速度。
新型显示芯片的采用,可能是为了提供清晰、实时的数据显示,包括时间、里程和速度等信息。这样的显示界面对于用户监控小车状态和调试系统参数至关重要。
整个系统的设计考虑了电路的简洁性和可靠性,实验测试结果证明了该设计能够满足预期的功能需求。这篇论文详细阐述了硬件系统的设计方法和测试结果分析,对于理解和实现类似的智能小车项目具有很高的参考价值。

剩余43页未读,继续阅读

代码改变世界ctw
- 粉丝: 5w+
- 资源: 44
 我的内容管理
展开
我的内容管理
展开







最新资源
- 基于Python和Opencv的车牌识别系统实现
- 我的代码小部件库:统计、MySQL操作与树结构功能
- React初学者入门指南:快速构建并部署你的第一个应用
- Oddish:夜潜CSGO皮肤,智能爬虫技术解析
- 利用REST HaProxy实现haproxy.cfg配置的HTTP接口化
- LeetCode用例构造实践:CMake和GoogleTest的应用
- 快速搭建vulhub靶场:简化docker-compose与vulhub-master下载
- 天秤座术语表:glossariolibras项目安装与使用指南
- 从Vercel到Firebase的全栈Amazon克隆项目指南
- ANU PK大楼Studio 1的3D声效和Ambisonic技术体验
- C#实现的鼠标事件功能演示
- 掌握DP-10:LeetCode超级掉蛋与爆破气球
- C与SDL开发的游戏如何编译至WebAssembly平台
- CastorDOC开源应用程序:文档管理功能与Alfresco集成
- LeetCode用例构造与计算机科学基础:数据结构与设计模式
- 通过travis-nightly-builder实现自动化API与Rake任务构建
