直流电机双闭环调速系统Simulink建模仿真详解
下载需积分: 26 | PDF格式 | 2.26MB |
更新于2024-07-24
| 81 浏览量 | 举报
"本章深入探讨Simulink在动态系统建模仿真中的应用,特别是针对直流电机双闭环调速系统。首先,Simulink作为一个强大的工具,以其直观的图形界面和集成化特性,使得系统建模和仿真过程变得更加便捷,相较于传统的MATLAB命令行方式,极大地提高了效率和易用性。
在建立动态系统Simulink仿真模型时,关键步骤是从系统的功能框图入手。例如,对于直流电机双闭环调速系统,其框图描述了系统的基本控制结构,包括电压环和电流环。通过对系统框图的理解,我们可以设计出电流调节器ACR和转速调节器ASR,这两个通常是基于PI控制器的。
设计过程中,首先单独调整电流调节器ACR的参数,然后在接通转速环后,再对转速调节器ASR进行参数整定,同时兼顾电流环的参数优化。为了模拟实际操作,模型中采用了信号源模块的阶跃信号R(t),其幅值可灵活调整,以模拟不同范围的给定输入电压(-10V至10V),并考虑到负载的影响。
在Simulink仿真模型中,转速调节器和电流调节器被作为空白子系统进行构建,这有助于清晰地展示它们各自的功能和相互作用。这种模型构建方法使得动态系统的仿真更加准确,能够帮助工程师快速验证控制策略的效果,找出潜在问题并进行优化。
总结来说,本章重点在于介绍如何利用Simulink的图形化界面和模块化设计,通过系统框图将理论模型转化为可仿真的动态系统,这对于理解控制系统的运行机制以及优化控制算法具有重要意义。通过实际案例演示,读者不仅可以掌握基本的Simulink建模仿真技术,还能提升复杂系统建模的能力。"

249
第
7
章
动态系统
Simulink
建模与仿真
再
利用
每
个
微
分方程
之
间的变量
联
系,就建立
起
整个系统的
Simulink
仿真模型。不
管
系统的
数学模型简单与
否
,建立
Simulink
仿真模型的方法
都
是这
样
。下面以建立
交
流电机
Simulink
仿真模型为例,来进一步说明利用
微
分方程建立系统
Simulink
仿真模型的方法。
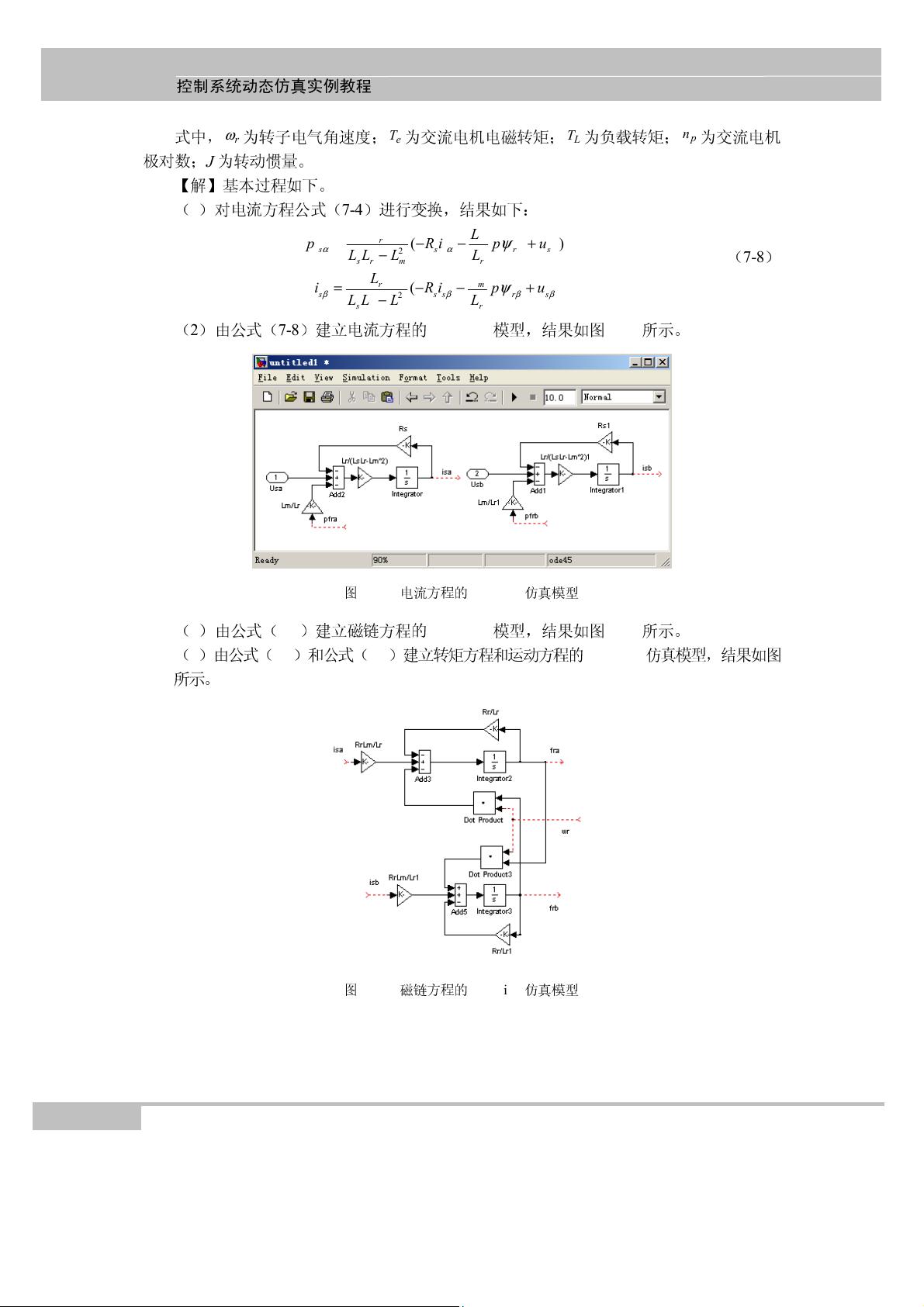
【例
7-5
】试建立
交
流电机
Simulink
仿真模型,并对其进行封装。
按照派克
方程,
静止
βα
,
坐
标系下
交
流电机数学模型如下。
定子电压方程
:
βββ
ααα
ψ
ψ
ssss
ssss
iRpu
iRpu
+=
+
=
(
7-1
)
转子电压方程
:
βαββ
αβαα
ψωψ
ψ
ω
ψ
rrrrrr
rrrrrr
iRpu
iRpu
+−=
+
+
=
(
7-2
)
磁链
方程
:
βββ
ααα
βββ
ααα
ψ
ψ
ψ
ψ
smrrr
smrrr
rmsss
rmsss
iLiL
iLiL
iLiL
iLiL
+=
+=
+=
+
=
(
7-3
)
如果
按
转子
磁场
控制,以定子
βα
,
轴
相电流,转子
βα
,
轴磁链
和转子电
气角
速度
r
ω
为
状
态变量,得到如下数学模型
:
βββ
ααα
ψσ
ψσ
sr
r
m
sss
sr
r
m
sss
up
L
L
ipLR
up
L
L
ipLR
+−=+
+−=+
)(
)(
(
7-4
)
αβββ
βααα
ψωψψ
ψωψψ
rrr
r
r
s
r
mr
r
rrr
r
r
s
r
mr
r
L
R
i
L
LR
p
L
R
i
L
LR
p
+−=
−−=
(
7-5
)
式中,
p
为
微
分
算
子
;
α
s
i
、
β
s
i
分
别
为定子
βα
,
轴
相电流
;
α
ψ
r
、
β
ψ
r
分
别
为转子
βα
,
轴
磁链;
α
s
u
、
β
s
u
为经过
三
相
/
两相
坐
标系变
换
后的定子两相输入电压
;
σ
为电机
漏感
系数,
rs
m
LL
L
2
1
−=
σ
;
s
L
、
r
L
、
m
L
分
别
为定子电
感
、转子电
感
、定子与转子
之
间的
互感;
R
s
、
R
r
分
别
为定子电
阻
、转子电
阻
。此外,
交
流电机还有一个转
矩
方程和一个运动方程。
转
矩
方程
:
)(
βααβ
ψψ
rsrs
r
m
pe
ii
L
L
nT −=
(
7-6
)
运动方程
:
r
p
Le
p
n
J
TT
ω
=−
(
7-7
)
剩余49页未读,继续阅读
相关推荐





二蛋1
- 粉丝: 0
 我的内容管理
展开
我的内容管理
展开







最新资源
- Enslavism:构建高效WebRTC服务器框架的实践指南
- 深度解析Android图片裁剪控件MCropImageView实现
- 易语言:系统工具快速执行专用版源码解析
- 现金处理系统创新设计与行业应用解析
- Python数据分析库Pandas新版本发布
- Windows驱动开发技术详解及调试技巧
- 深入浅出protobuf代码生成工具的使用与原理
- 基于C#的超市交易系统设计与实现
- 使用Python实现的自动网页分类器项目
- Iobit SmartRam内存优化工具:释放更多Chrome内存
- Rails宠物租赁应用开发与Ruby技术实现
- Android自定义控件简易入门与实践指南
- 官方佳能mx490打印机驱动下载与安装指南
- 瓦楞纸支撑架创新设计及其应用研究
- 一键生成QQ与微信个性签名工具
- IKAnalyzer分词工具必备jar包
