STM32磁导航AGV驱动器设计与实现
"STM32的磁导航自主导引车通用驱动器设计"
在本文中,我们探讨了基于STM32F103单片机的磁导航自主导引车(AGV)通用驱动器的设计。这种驱动器的核心是STM32F103微控制器,它与多种外围模块相结合,构建了一个能够适应不同磁导航AGV控制需求的底层控制系统。
首先,AGV系统在现代自动化环境中具有重要意义,因其灵活性、可靠性及自动化程度高等特性而被广泛应用。磁导航作为一种常见的AGV导航技术,依赖于车辆上的磁导航传感器来检测地面铺设的磁条,从而精确地确定路径和位置。
在磁导航AGV驱动器的设计中,关键在于如何实现通用性。通过对已有驱动器的研究,本文提出了一个包括单片机、电源、输入/输出(DI/DO)、RFID读写、数模转换(DAC)、模数转换(ADC)、CAN总线、高速编码器、安全模块和串口通信等多个模块的通用驱动器方案。这些模块覆盖了AGV驱动器的基本需求,如电机控制、传感器数据采集、通信以及安全性。
STM32F103作为主控芯片,负责处理来自各种传感器的数据,如磁条传感器的模拟电压信号,以及RFID模块的信息,实现路径识别和站点识别。电源模块确保稳定供电,DI/DO模块处理数字输入输出信号,如控制AGV的运动状态。RFID读写模块则用于识别特定地点,提供更高级别的导航信息。
ADC模块用于采集磁条传感器的输出,以确定AGV相对于磁条路径的位置偏差。DAC模块可能用于生成控制电机的信号,而CAN总线通信模块确保多驱动器间的协调动作,特别是在需要多个驱动器协同工作的复杂AGV系统中。高速编码器则提供电机速度和位置信息,帮助精确控制AGV的运动。安全模块和串口通信模块则确保系统的安全性和远程监控能力。
通过这样的设计,驱动器不仅可以控制单一AGV的双电机,还能根据需要扩展到更多的驱动器,通过CAN总线实现多驱动器同步,从而适应不同功能和复杂度的AGV任务。这一通用驱动器的设计理念和实现方法为磁导航AGV的控制系统提供了标准化和模块化的解决方案,有助于降低开发成本,提高系统的可维护性和可扩展性。
STM32F103为核心的磁导航AGV通用驱动器设计,充分考虑了AGV的导航、控制、通信和安全需求,展示了在实际应用中的广泛适应性和高效性能。这种驱动器的成功运行证明了其在不同功能的磁导航AGV上的实用性,为AGV技术的发展提供了有力的支持。
STM32的磁导航自主导引车通用驱动器设计的磁导航自主导引车通用驱动器设计
本驱动器采用STM32FV103作为主控芯片,辅以磁条传感器模块、RFID(射频识别)模块等外围模块构成了一
个完整的AGV底层控制系统,它可以满足多种磁导航AGV的控制要求。该驱动器已在3种不同功能的磁导航AGV
上成功运行,控制AGV完成了指定的任务,达到了一定的通用性。
引言
AGV系统在当前柔性制造系统(FMS)和自动化仓储系统中扮演着重要的角色。AGV具有适应性好、柔性程度高、可靠性
好、可实现生产和搬运功能的集成化和自动化等优点[1]。
AGV的导航方式主要有激光导航、电磁导航、视觉导航、GPS(全球定位系统)导航、磁导航等,本文主要针对磁导航方式
的AGV进行深入探讨,磁导航AGV主要是基于磁导航传感器感应贴在路面上的磁条进行路径跟踪并完成其自主行驶的功能。
磁导航传感器通过检测铺设在地面上的磁条来判断AGV与目标路径的偏差,然后输出电压模拟量[2]。对于磁导航AGV驱动器
的设计,为更好地满足通用性需求,需要对现有驱动器的组成单元进行总结和归纳,并且结合实际需求,找出共同点和不同
点,为磁导航AGV通用驱动器的设计找到突破口。
通过查阅相关文献,对磁导航AGV驱动器的组成有了一个总体认识,主要包括单片机单元、供电单元、手动控制单元、声光
报警单元、站点识别单元、工位检测单元、电机驱动单元、CAN总线单元、避障单元、磁导航单元、姿态反馈单元、通信单
元、安全辅助单元等 [35]。
1 驱动器硬件电路设计
在对磁导航AGV驱动器的组成单元进行分析之后,本文提出了一种基于STM32F103芯片为控制核心的通用驱动器,它包含以
下模块:单片机模块、电源模块、DI/DO模块、RFID读写模块、DAC输出模块、ADC采集模块、CAN总线通信模块、高速编
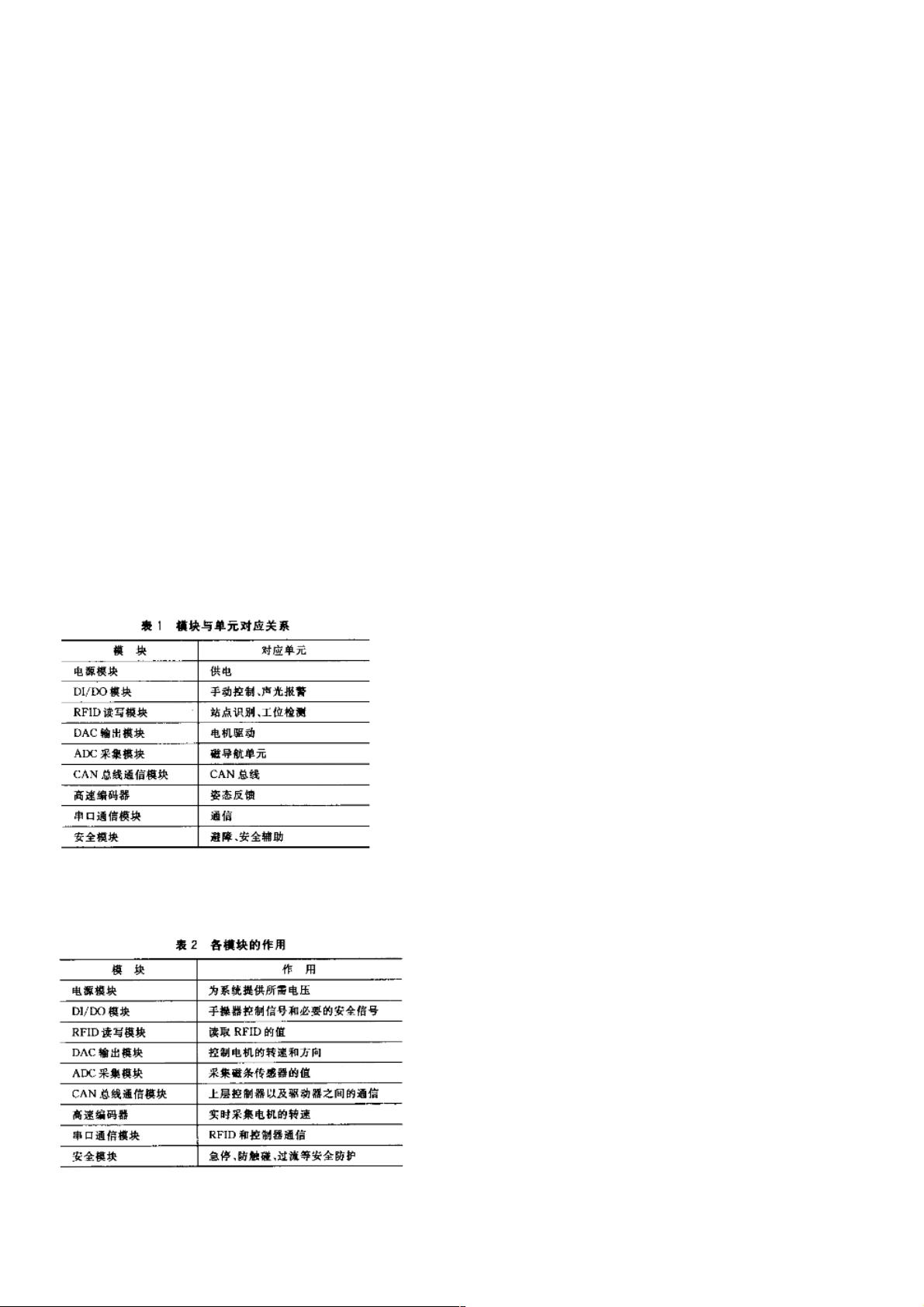
码器,安全模块以及串口通信模块,这些模块与磁导航AGV驱动器的组成单元之间的对应关系如表1所列。
由表1可以看出,提出的通用驱动器设计方案可以满足磁导航AGV对主要组成单元的需求。该驱动器可同时控制两个电机以及采
集相应的速度,还可同时采集两路磁条传感器输出的模拟电压,对于执行复杂功能的AGV而言,可以增加驱动器的数量以满
足要求,各驱动器之间可以通过CAN总线保持动作协调一致,共同完成指定的动作。
各个模块对应不同的功能和作用,各司其职,互相配合,完成指定的功能。各模块的主要作用如表2所列。
表2 各模块的作用
1.1 单片机模块
本设计采用STM32作为控制芯片,此芯片基于ARM CortexM3内核,具有高性能、低成本、低功耗的特点。另外,此芯片的
可移植性很好,并有许多官方函数库可以直接调用,大大缩短了开发周期。STM32F103系列有80个可以自由操控的芯片引
下载后可阅读完整内容,剩余4页未读,立即下载
1231 浏览量
2021-06-28 上传
2021-10-16 上传
295 浏览量
2021-10-16 上传
123 浏览量
2021-10-16 上传

weixin_38728276
- 粉丝: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- ITween插件实用教程:路径运动与应用案例
- React三纤维动态渐变背景应用程序开发指南
- 使用Office组件实现WinForm下Word文档合并功能
- RS232串口驱动:Z-TEK转接头兼容性验证
- 昆仑通态MCGS西门子CP443-1以太网驱动详解
- 同步流密码实验研究报告与实现分析
- Android高级应用开发教程与实践案例解析
- 深入解读ISO-26262汽车电子功能安全国标版
- Udemy Rails课程实践:开发财务跟踪器应用
- BIG-IP LTM配置详解及虚拟服务器管理手册
- BB FlashBack Pro 2.7.6软件深度体验分享
- Java版Google Map Api调用样例程序演示
- 探索设计工具与材料弹性特性:模量与泊松比
- JAGS-PHP:一款PHP实现的Gemini协议服务器
- 自定义线性布局WidgetDemo简易教程
- 奥迪A5双门轿跑SolidWorks模型下载
