CIA-SSD:点云对象检测的新方法
需积分: 9 3 浏览量
更新于2024-08-12
收藏 3.62MB PDF 举报
"这篇文档是针对点云处理领域的一个研究论文,主要介绍了一种名为CIA-SSD(Confident IoU-Aware Single-Stage Object Detector)的新型单阶段对象检测器,它针对点云中的物体定位和分类问题。该模型通过结合高维语义特征和低维空间特征,提升了边界框预测的准确性,并通过IoU感知的置信度校正模块优化了分类置信度,使其与定位精度更加一致。此外,论文还提出了距离变化的IoU权重策略,以改善检测效果。"
本文的核心知识点包括:
1. 点云处理:点云数据是三维空间中由多个点构成的集合,通常由激光雷达或结构光等传感器生成。点云处理是计算机视觉和机器人领域中的重要部分,用于理解三维环境。
2. 单阶段对象检测器:与两阶段检测器相比,单阶段检测器如SSD(Single Shot MultiBox Detector)在一次前向传播中完成目标定位和分类,速度较快但可能牺牲一些精度。CIA-SSD在此基础上进行改进,旨在提高定位精度和分类一致性。
3. Spatial-Semantic Feature Aggregation:这是一种特征融合模块,它将高层抽象语义特征与低层空间特征相结合,以提升模型的预测性能。这有助于模型理解物体的整体结构和局部细节,从而提高检测的准确性和鲁棒性。
4. IoU(Intersection over Union):IoU是评估目标检测精度的常用指标,表示预测边界框与真实边界框重合部分占总面积的比例。在CIA-SSD中,IoU不仅用于评估,还用于指导置信度的校正。
5. IoU-Aware Confidence Rectification:这一模块是CIA-SSD的关键创新,它根据预测的IoU值来调整分类的置信度,确保高置信度对应于高定位精度,增强模型的可靠性。
6. Distance-variant IoU-weight:这是一种策略,根据目标与检测器的距离动态调整IoU的权重,可能旨在解决远距离目标检测时的难度,提高不同距离下检测的一致性。
这篇论文对于点云处理领域的科研人员来说具有很高的参考价值,它提出的新方法可以改进现有单阶段检测器的性能,尤其是在复杂的三维环境中定位和识别物体。同时,对于图像处理和计算机视觉领域的研究者,理解并应用这些技术可以帮助他们开发更高效、准确的算法。
CIA-SSD: Confident IoU-Aware Single-Stage Object Detector From Point Cloud
Wu Zheng, Weiliang Tang, Sijin Chen, Li Jiang, Chi-Wing Fu
The Chinese University of Hong Kong, China
{wuzheng, lijiang, cwfu}@cse.cuhk.edu.hk, {tangwl123, chensjvin}@foxmail.com
Abstract
Existing single-stage detectors for locating objects in point
clouds often treat object localization and category classifica-
tion as separate tasks, so the localization accuracy and clas-
sification confidence may not well align. To address this is-
sue, we present a new single-stage detector named the Con-
fident IoU-Aware Single-Stage object Detector (CIA-SSD).
First, we design the lightweight Spatial-Semantic Feature Ag-
gregation module to adaptively fuse high-level abstract se-
mantic features and low-level spatial features for accurate
predictions of bounding boxes and classification confidence.
Also, the predicted confidence is further rectified with our
designed IoU-aware confidence rectification module to make
the confidence more consistent with the localization accu-
racy. Based on the rectified confidence, we further formulate
the Distance-variant IoU-weighted NMS to obtain smoother
regressions and avoid redundant predictions. We experiment
CIA-SSD on 3D car detection in the KITTI test set and show
that it attains top performance in terms of the official ranking
metric (moderate AP 80.28%) and above 32 FPS inference
speed, outperforming all prior single-stage detectors. The
code is available at https://github.com/Vegeta2020/CIA-SSD.
1 Introduction
To detect objects in autonomous driving, point clouds are
often adopted to offer robust information. In general, there
are two classes of methods to detect objects in point clouds:
single-stage and two-stage. Though two-stage detectors usu-
ally attain higher average precisions benefited from an extra
refinement stage, single-stage detectors are typically more
efficient due to their simpler network structures. Also, the
detection precisions of recent single-stage detectors (He
et al. 2020; Yang et al. 2020; Shi and Rajkumar 2020) gradu-
ally approach that of the state-of-the-art two-stage detectors.
The advantages of time efficiency and competitive precision
motivate us to focus this work on single-stage detectors.
Existing 3D object detectors often treat object localization
and category classification as separate tasks, so the local-
ization accuracy and classification confidence may not align
well (Jiang et al. 2018). Hence, two-stage detectors (Yang
et al. 2019; Shi et al. 2020a) extract features from the region
Copyright © 2021, Association for the Advancement of Artificial
Intelligence (www.aaai.org). All rights reserved.
1
[CVPR 2020]
[CVPR 2020]
[CVPR 2020]
[AAAI 2020]
[CVPR 2019]
[Sensor 2018]
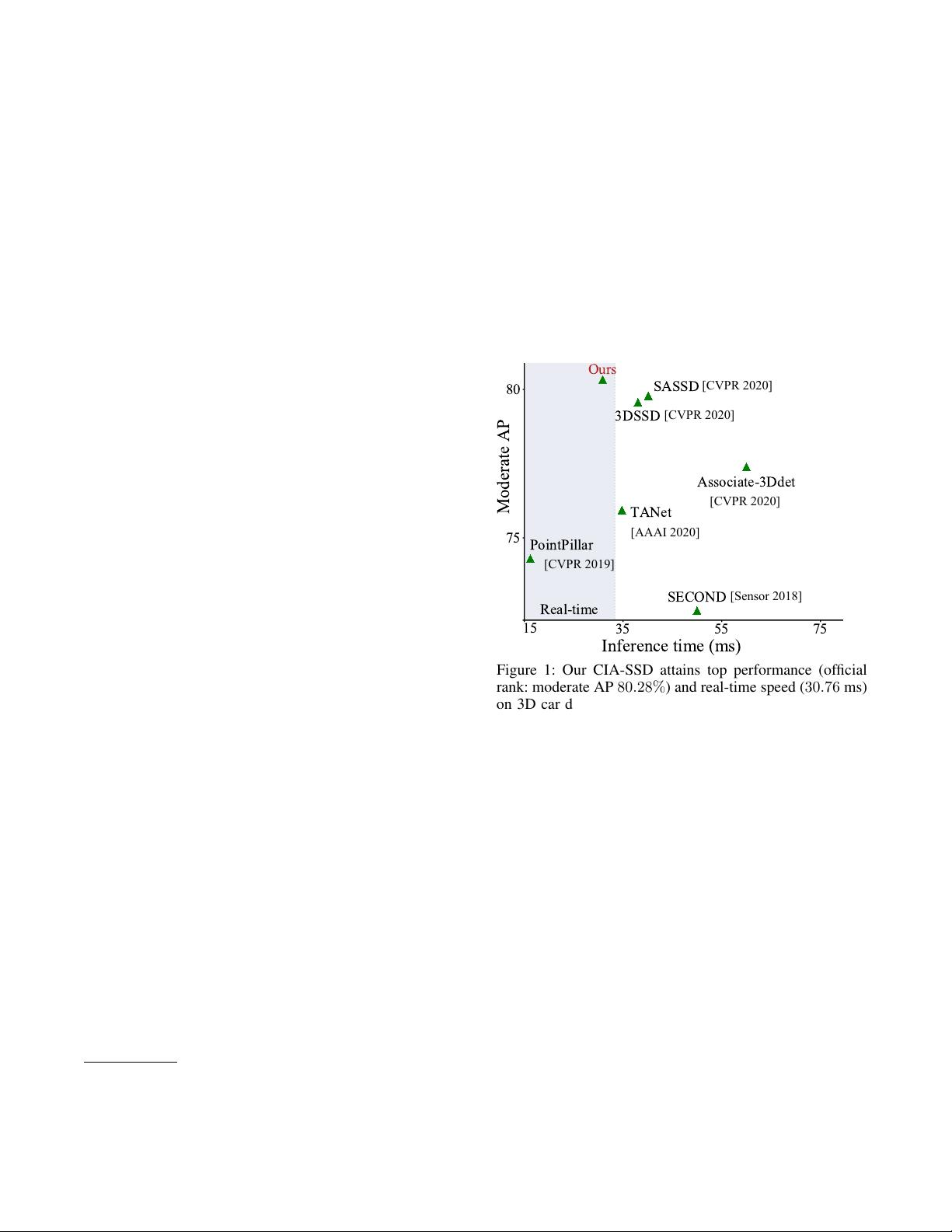
Figure 1: Our CIA-SSD attains top performance (official
rank: moderate AP 80.28%) and real-time speed (30.76 ms)
on 3D car detection in KITTI test set (Geiger et al. 2013),
compared with the state-of-the-art single-stage detectors.
proposals generated by the first-stage backbone and predict
the IoUs between the regressed bounding boxes and ground-
truth boxes in the second stage to refine the confidence pre-
dictions. Compared with hard-category labels, the soft IoU
labels are usually more consistent with the localization qual-
ities, thus leading to more accurate confidence predictions.
Compared with two-stage detectors, single-stage detec-
tors cannot train features extracted from their predicted
bounding boxes with a second-stage network. Also, their
features are learned mostly based on the pre-defined anchors
or classified positive points, so the resulting IoU predictions
may not be as accurate as those in the two-stage networks.
Hence, general single-stage detectors cannot effectively rec-
tify confidence predictions like the two-stage ones.
To resolve this issue, SASSD (He et al. 2020), a very re-
cent single-stage detector, exploits an interpolation approach
to obtain the region proposal features for confidence rectifi-
cation. Their approach is, however, very complex with the
interpolation operation. In this work, we design a new confi-
dence rectification module embedded in our Confident IoU-
arXiv:2012.03015v1 [cs.CV] 5 Dec 2020
下载后可阅读完整内容,剩余8页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2011-11-19 上传

qq_26993837
- 粉丝: 4
- 资源: 10
 我的内容管理
展开
我的内容管理
展开







最新资源
- 正整数数组验证库:确保值符合正整数规则
- 系统移植工具集:镜像、工具链及其他必备软件包
- 掌握JavaScript加密技术:客户端加密核心要点
- AWS环境下Java应用的构建与优化指南
- Grav插件动态调整上传图像大小提高性能
- InversifyJS示例应用:演示OOP与依赖注入
- Laravel与Workerman构建PHP WebSocket即时通讯解决方案
- 前端开发利器:SPRjs快速粘合JavaScript文件脚本
- Windows平台RNNoise演示及编译方法说明
- GitHub Action实现站点自动化部署到网格环境
- Delphi实现磁盘容量检测与柱状图展示
- 亲测可用的简易微信抽奖小程序源码分享
- 如何利用JD抢单助手提升秒杀成功率
- 快速部署WordPress:使用Docker和generator-docker-wordpress
- 探索多功能计算器:日志记录与数据转换能力
- WearableSensing: 使用Java连接Zephyr Bioharness数据到服务器
