飞思卡尔智能车摄像头标定方法:解决梯形与桶形失真
105 浏览量
更新于2024-09-02
收藏 358KB PDF 举报
"基于视觉传感器的智能车摄像头标定技术研究主要关注在智能车比赛中如何解决摄像头的梯形失真和桶形失真问题。在飞思卡尔智能车大赛的背景下,参赛队伍面临摄像头成像的扭曲问题,这源于摄像头光轴与地面的非直角以及广角镜头带来的视角变化。传统的解决方案如[1]通过线性修正消除梯形失真,但实验过程繁琐且无法处理桶形失真。其他方法如[2]使用图像标定板,通过测量黑线在图像中的位置来估计实际位置,但因黑线宽度导致精度受限。
文献[3]提出非均行采集策略,试图通过调整AD模块的采集行分布来保持纵向无畸变,但这要求频繁标定以适应不同安装角度,实用性不高。文献[4]通过构建光路几何模型,精确测量摄像头的光学中心位置,通过测量摄像头架固定螺钉高度H、俯角θ和近端距S来确保标定精度。
实验方案的核心在于设计一种精确的标定方法,例如,制作正方形标定区域,摄像头被水平对准实验板中心,同时精确测量特征点在像素上的位置。这种方法考虑了摄像头的安装位置和光学中心的计算,以最小化失真影响。本文的研究旨在提供一种简单且精确的摄像头标定技术,适用于巡线小车这类应用,以提高智能车的行驶稳定性和视觉识别能力。"
基于视觉传感器的智能车摄像头标定技术研究基于视觉传感器的智能车摄像头标定技术研究
本文以飞思卡尔智能车大赛为背景,制作一个能巡线快速行驶的摄像头小车。由于摄像头光轴与地面呈一定夹
角,于是其成像存在梯形失真;为了扩大视野,广角镜头越来越为很多队伍所采用,于是又存在桶形失真。本文
提出的这个方法,可有效解决这两种失真,实际操作并不复杂。
引言引言
本文以飞思卡尔
各队解决方案综述 各队解决方案综述
文献[1]提出的方法是:可以通过对于每行提取的道路位置通过一个线性修正来消除梯形失真,可通过实验的方式确定线
性补偿的系数。但是该实验方法比较繁杂,并且不能消除桶形失真。
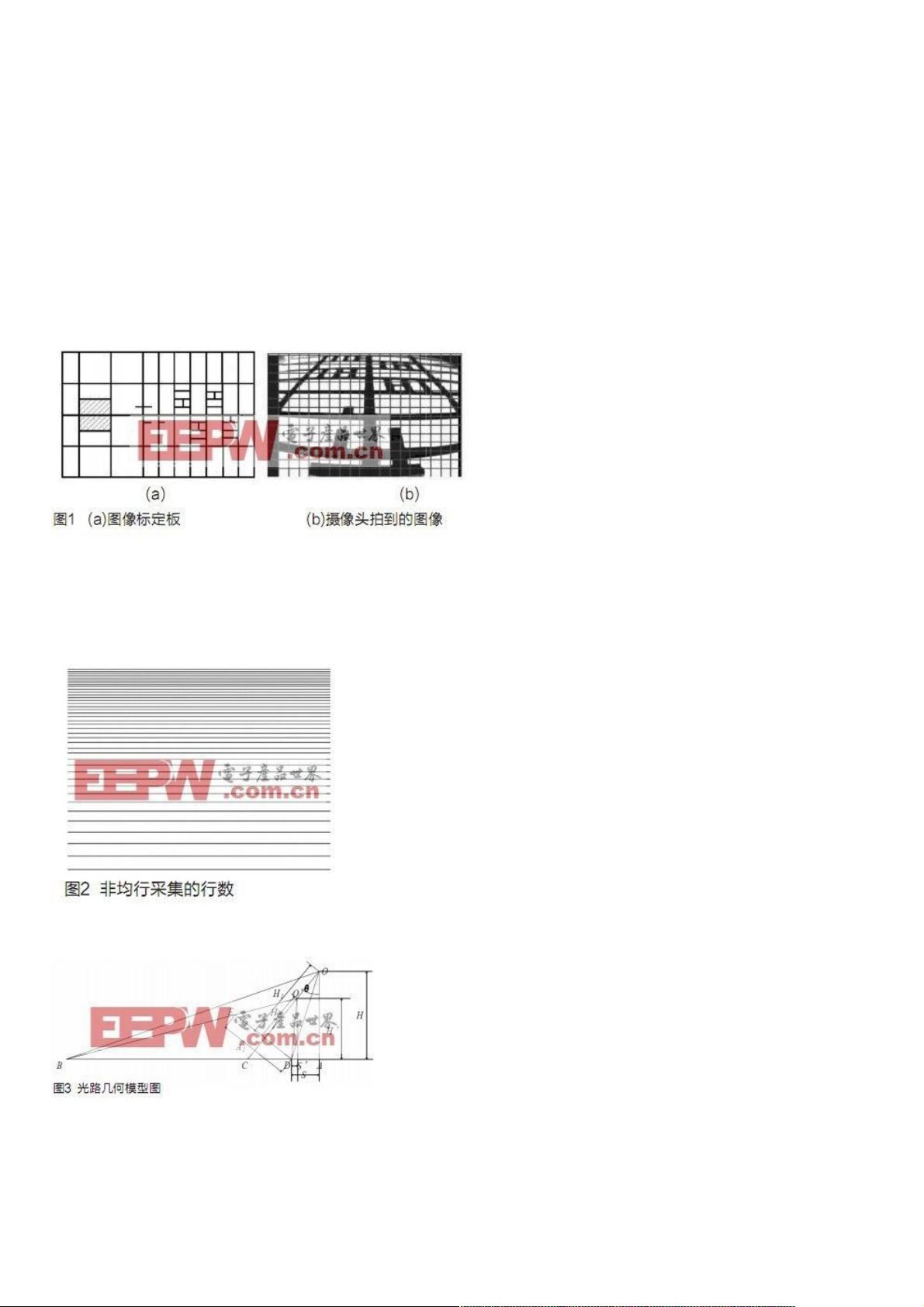
文献[2]制作了一个图像标定板,如图1所示。
其原理是:图1(a)中阴影部分是车体放置的位置。在标定板上等间距地贴了许多黑线,给标定板拍照后,就可以知道实际
中的位置与图像中的位置的相互关系。这个方法由于黑线有一定宽度,所以会存在较大误差。
文献[3]采用非均行采集的方案。所谓非均行采集是与均行采集对应的。在均行采集中,AD模块所采集的行均匀分布于摄
像头输出的图像中。而非均行采集则是指,AD模块所采集的行按某种规则非均匀地分布在原始图像中,而这种规则是保证采
集得到的图像在纵向上(小车中轴方向)与现实景物不畸变。然后再确定每一行的横向畸变系数。
如图2所示,非均行采集时,远处采得密,近处采得稀。由于摄像头安装方式在实验时会经常变动,以确定最佳俯角和最
佳高度,每当变动就需要重新标定。这个方案就不大方便了。文献[4]建立了一个光路几何模型图,如图3所示。
实验方案:量取摄像头架固定螺钉的高度H与摄像头中心相对于竖直杆的偏转角度(俯角)θ。由于光学中心的计算完全由
这两个数据及近端距固定杆的距离S(即测量保险杠距固定杆的距离S0和近端距保险杠距离S'相加得到,也可直接在实验板上
测量由近端黑线到摄像头固定杆的距离S)确定,因此要做到越精确越好。由O点做垂线长度为H至点A,做水平线AB,截取AD
长为S,DB过O点做与垂直线成θ的射线交AB于C,过D做DE垂直于OC,并使OC为DE的垂直平分线,连接BE并延长,交OC
与O’,则O’为光学中心。从图上能算得O’距底边距离为H’,俯角不变。
将实验板垂直放置,做出边长为A1的正方形标定区域,即图3中的DE平面,将摄像头水平对向实验板中心C,摄像头架固
定螺钉距实验板距离为H1。读出标定实验板上特征点的相应像素点。可以得到图4中(X,Y)与像素点(U,V)的关系(U为行
下载后可阅读完整内容,剩余5页未读,立即下载
2013-09-14 上传
2023-02-28 上传
2023-07-28 上传
2023-06-06 上传
2023-06-11 上传
2023-09-12 上传
2023-10-14 上传
2023-09-06 上传

weixin_38637144
- 粉丝: 4
- 资源: 925
 我的内容管理
展开
我的内容管理
展开







最新资源
- NIST REFPROP问题反馈与解决方案存储库
- 掌握LeetCode习题的系统开源答案
- ctop:实现汉字按首字母拼音分类排序的PHP工具
- 微信小程序课程学习——投资融资类产品说明
- Matlab犯罪模拟器开发:探索《当蛮力失败》犯罪惩罚模型
- Java网上招聘系统实战项目源码及部署教程
- OneSky APIPHP5库:PHP5.1及以上版本的API集成
- 实时监控MySQL导入进度的bash脚本技巧
- 使用MATLAB开发交流电压脉冲生成控制系统
- ESP32安全OTA更新:原生API与WebSocket加密传输
- Sonic-Sharp: 基于《刺猬索尼克》的开源C#游戏引擎
- Java文章发布系统源码及部署教程
- CQUPT Python课程代码资源完整分享
- 易语言实现获取目录尺寸的Scripting.FileSystemObject对象方法
- Excel宾果卡生成器:自定义和打印多张卡片
- 使用HALCON实现图像二维码自动读取与解码
