Delmia实战指南:构建工作环境与仿真分析
"本资源是一份DELMIA的实用教程,主要涵盖了机器人仿真、离线编程和人机工程的实践应用,适用于虚拟制造场景。教程详细介绍了如何创建工作环境、制定工艺计划、增强模拟效果、分析运动、生成输出文件以及进行工具验证等步骤。"
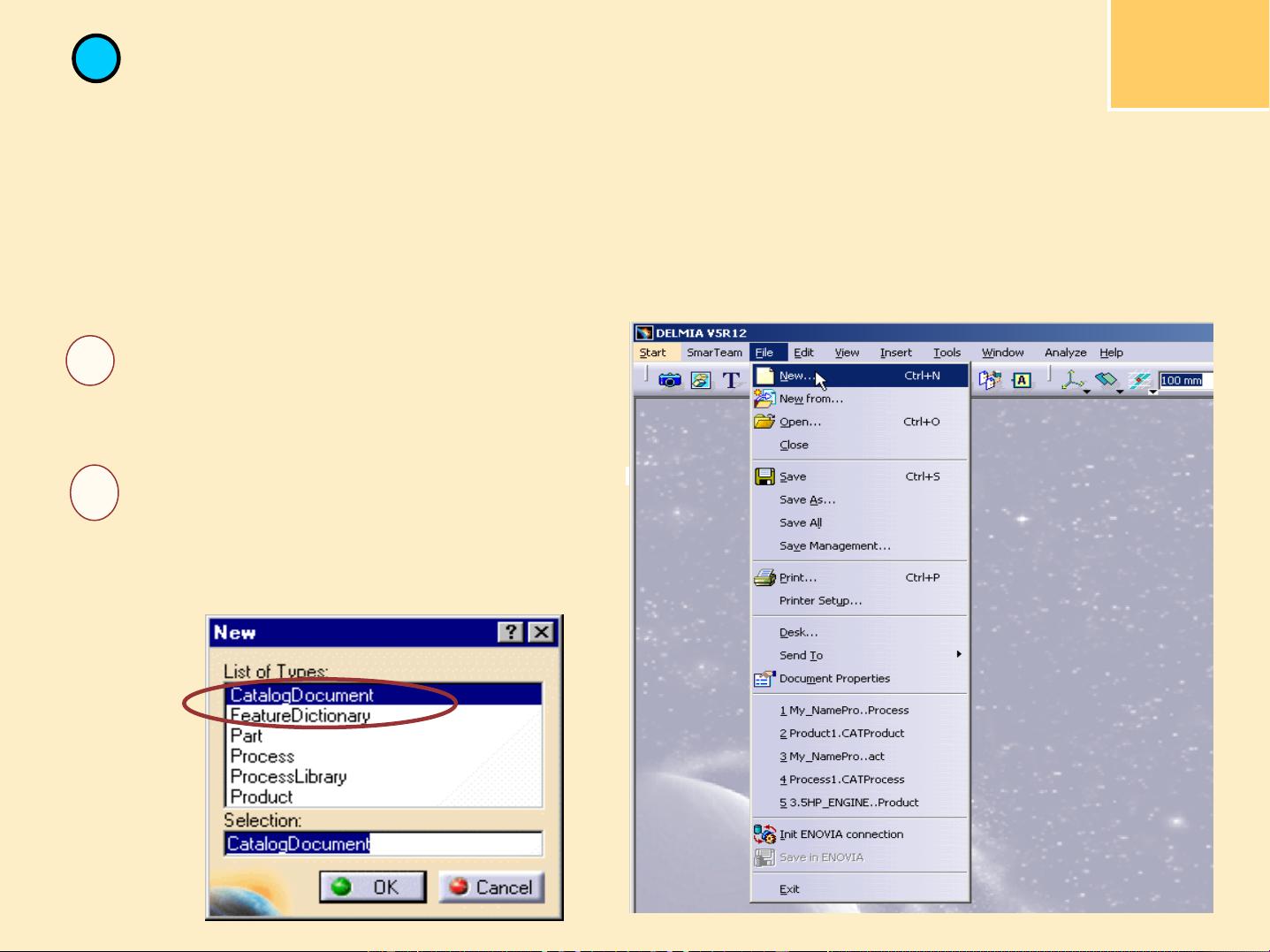
在DELMIA(数字化生命周期体验管理)的实践中,首先需要创建一个反映用户需求和期望结果的工作环境。这个过程通常涉及以下关键知识点:
1. **设置选项**:在开始仿真之前,用户需要设定一系列的参数和选项来确保模拟环境符合实际操作条件。这些选项可能包括物理特性、运动规则、时间步长、精度设置等,它们将直接影响到模拟的准确性和效率。
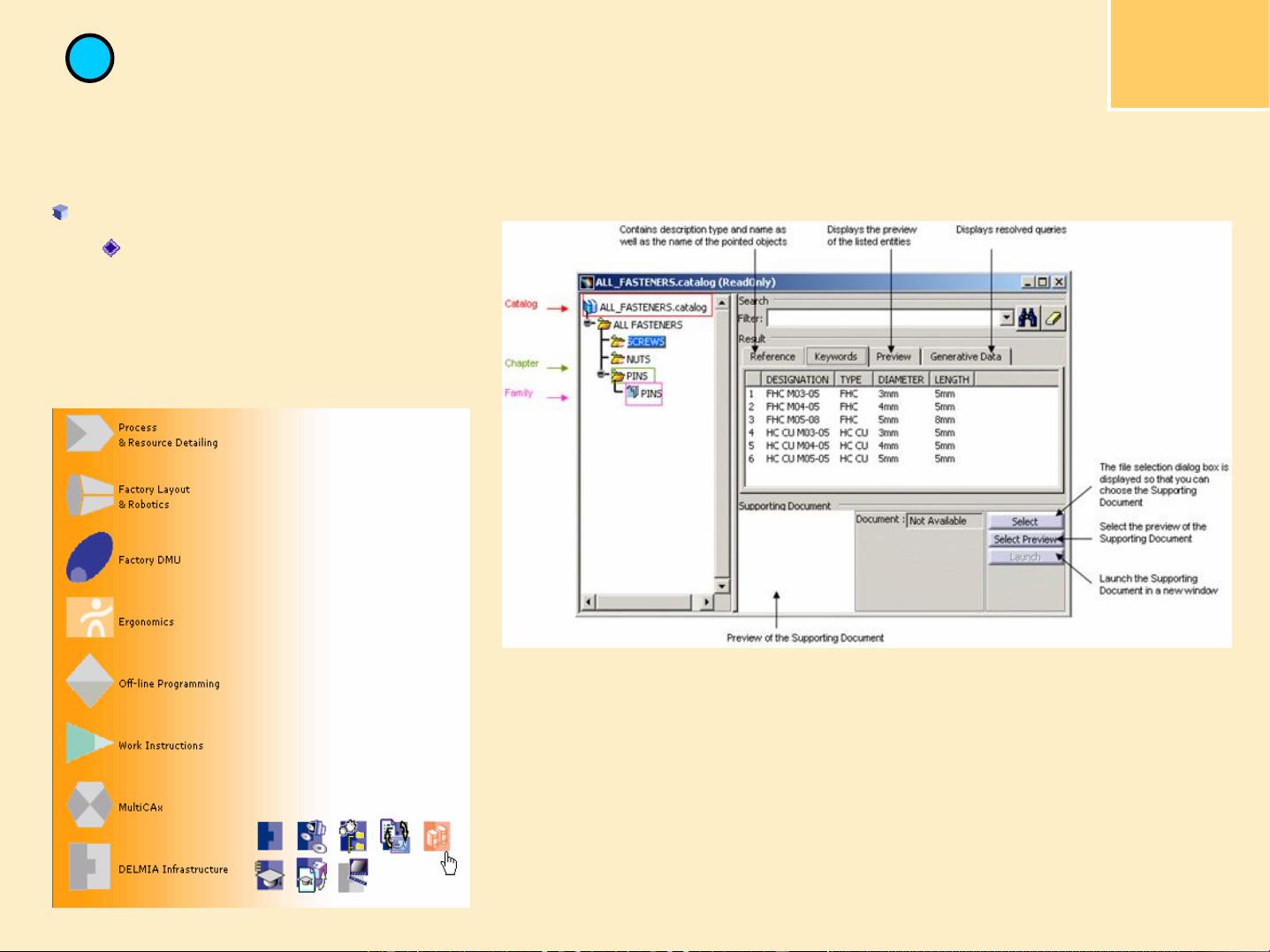
2. **创建项目目录**:为了提高工作效率,用户可以创建一个项目目录,将常用的对象和组件集中管理。这样在需要时,可以快速便捷地访问,避免在大量的对象库中寻找。
3. **构建3D布局**:在AEC(建筑、工程和施工)的工厂布局中创建虚拟世界的3D模型是至关重要的。这涉及到导入工厂设施布局、设备、工装等元素,为后续的机器人路径规划和人机交互打下基础。
4. **插入资源**:资源可以是机器人、工作站、工具或其他生产要素。在DELMIA环境中,用户需要明确指定这些资源的位置、属性和工作方式,以便于模拟其在生产过程中的行为。
5. **插入产品**:产品是生产流程中的核心。将产品模型引入到虚拟环境中,可以进行装配、搬运等操作的模拟,以验证设计的可行性和优化工艺流程。
6. **创建工艺计划**:工艺计划定义了产品制造的详细步骤,包括机器人任务分配、工作顺序、时间估计等。在DELMIA中,用户可以利用专门的工作台和工具进行这一过程。
7. **增强模拟**:这一步涉及添加更多的细节和动态效果,如机器人运动路径的优化、碰撞检测的设置、实时监控等,以使模拟更接近真实情况。
8. **分析运动**:通过模拟运行,分析机器人的运动轨迹、速度、加速度以及与周围环境的互动,确保其在安全和效率方面的表现。
9. **创建输出文件**:最后,用户可以生成各种输出文件,如报告、动画或数据,用于分享结果、进行决策或进一步分析。
10. **工具验证**:在虚拟环境中对工具进行验证,可以减少实际生产中的错误和风险。这包括验证工具的精度、性能以及与机器人系统的兼容性。
这份DELMIA教程不仅提供了理论知识,还包含了实际操作的步骤,对于学习和掌握机器人仿真、离线编程和人机工程的实践者来说,是一份非常有价值的参考资料。
Copyright DASSAULT SYSTEMES
11
Do It Yourself (1/1)
Set the following options
Node Tab Option Setting_____________________________________
General General Turn Off AutoBackup
General Document Other Documents= requires Instructor direction to
configure path to data
Display Tree Manipulation Turn on Automatic scroll
Display Navigation Turn on Display Manipulation Bounding box
Turn on Gravitational Effects to z axis
Parameters & Measures Report Generation Input XSL = requires Instructor direction to select script
Output Directory = requires Instructor direction to select
output directory location
Product Structure Cache Management Activate Work with the Cache System
Digital Process for Mfg Tree Activate Applicative Data
Digital Process for Mfg Libraries ADD Libraries = requires instructor direction to map path
to .ACT files
Digital Process for Mfg Gantt Chart Activate “Compare Roll up time of Parent with Calculated
time” (selected from drop down menu)
REMINDER: You must close and reopen the software for settings to take effect.
剩余65页未读,继续阅读
262 浏览量
575 浏览量
点击了解资源详情
3995 浏览量
905 浏览量
3995 浏览量
点击了解资源详情
点击了解资源详情
2024-11-01 上传

l9591
- 粉丝: 0
- 资源: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- e_shop.rar
- springboot整合mybatis+quartz实现任务持久化
- 弦乐
- DDNS_Updater:Windows Update for DDNS he.net
- TS3MusicBot WebStream (TeamSpeak & Discord)-crx插件
- 2014年春节拜年短信下载
- java版ss源码-elastic-job-spring-boot-starter:Elastic-JobSpringBoot自动集成,只需要
- 计分器项目打包软件.rar
- pyenvelope:Pyenvelope可帮助您找到一组点的任意定向的最小边界矩形。 最小边界矩形(MBR),也称为边界框或信封
- Udacity_DS_and_Algo:Udacity的数据结构和算法纳米程序
- spin.it.js
- 怎样组建标杆学习团队
- 聪明的报价
- Many Pins Lite-crx插件
- java版ss源码-hive-jdbc-uber-jar:基于最新ApacheHive版本的HiveJDBC“uber”或“独立”jar
- 取Excel表格有数据单元格的起讫行、列.e.rar
