智能小车设计指南第二版:新增摄像头与算法解析
下载需积分: 0 | PDF格式 | 3.8MB |
更新于2024-07-19
| 193 浏览量 | 举报
"智能小车设计指导第二版是由河海大学计算机与信息学院(常州)学生科协编写的,旨在帮助读者理解和设计智能小车。该版本是对第一版的升级,增加了摄像头、激光管、电磁和算法等内容,同时对基础部分的芯片原理和电路设计进行了深入解释,还包含了简单的程序设计和仿真,以利于初学者入门。作者团队包括孙浩、顾丽萍、尹海峰、李永强和宋加才,由孙浩负责统稿。"
在智能小车设计中,关键知识点包括:
1. 摄像头技术:摄像头用于捕捉赛道图像,实现视觉导航。了解摄像头的工作原理,包括像素、分辨率、帧率等参数,以及如何处理图像数据,进行目标检测和跟踪。
2. 激光管应用:激光管可能用于距离测量,构建光栅系统,实现障碍物检测。需要理解激光测距的原理,如时间飞行法(Time-of-Flight)或三角测距法。
3. 电磁技术:电磁部分可能涉及电磁感应或电磁驱动,用于控制小车的运动或接收赛道信号。学习电磁场理论,掌握电磁元件如电磁阀、电磁铁或霍尔传感器的工作方式。
4. 算法设计:算法是智能小车的核心,包括路径规划、PID控制、目标检测等。熟悉基础的控制理论,如卡尔曼滤波、粒子滤波,以及深度学习模型在自动驾驶中的应用。
5. 芯片原理和电路设计:了解微控制器如单片机的工作原理,掌握数字电路和模拟电路设计,包括电源管理、信号调理、传感器接口等。
6. 程序设计与仿真:编程是实现小车智能化的关键,常用语言可能是C/C++或Python。学习基本的编程语法和调试技巧,以及如何使用IDE进行仿真测试。
7. Protel设计:学习使用电子设计自动化工具,如Altium Designer(前身为Protel),进行电路板布局和布线。
8. 电路焊接:实践技能包括电路板的组装和焊接,了解不同类型的焊接技术,如烙铁焊、SMT工艺等。
9. 自动控制算法设计:理解PID控制器、滑模控制等经典控制策略,以及现代控制理论如模糊逻辑和神经网络。
10. 团队协作:智能小车项目通常需要多学科的协同工作,学会有效地沟通和分工,理解每个成员的角色和任务。
11. 创新与探索:鼓励读者跳出已有的设计方案,勇于尝试新的技术和方法,培养创新思维。
12. 持续学习与毅力:强调智能小车设计是一个长期且复杂的过程,需要持之以恒的精神,不断学习和解决问题。
最后,书中提供了计信科协论坛和资料下载服务器作为交流平台,供读者提问、讨论和获取更多资源。作者鼓励读者在遇到困难时积极寻求帮助,同时欢迎对书籍内容提出反馈和建议。
智能小车设计指导 第二版
-7-
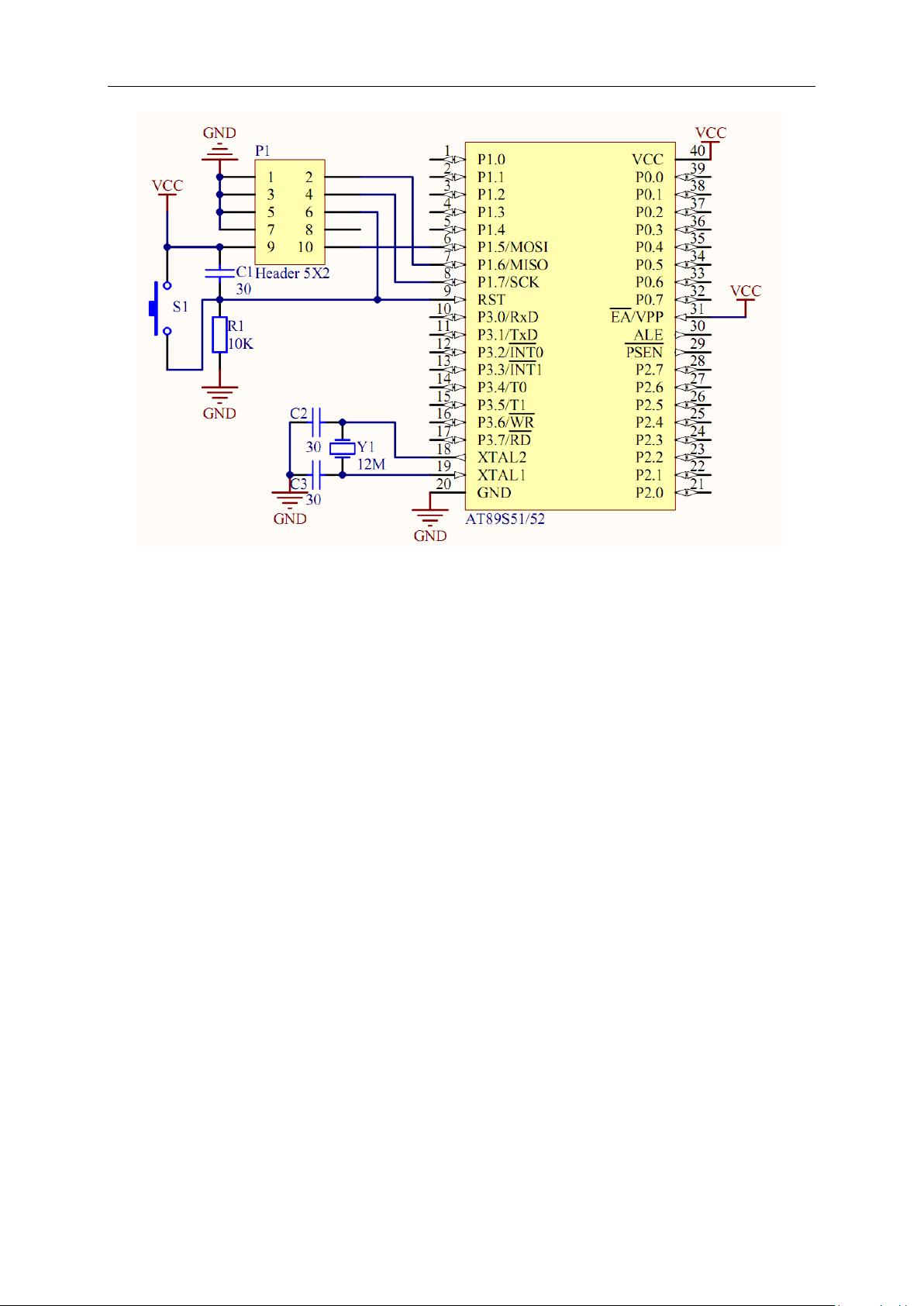
图 3.3 51 单片机最小系统
图 3.3 中的 51 单片机最小系统由以下几个部分组成:
1. 晶振电路,单片机要想工作必须有一个外部的时钟源,这个时钟源由外部晶振产生,具体电路
为图中的 Y1、C2、C3,在做电路板时应注意晶振和电容要靠近 18 脚和 19 脚放置,如果放置过
远可能会造成晶振不能起振,或工作不稳定。典型值为 C2、C3 30pF,Y1 12M。
2. 复位电路,复位电路包括上电复位和手动复位两部分,51 系列单片机多为高电平复位,也就是
说 RST(9)脚上只要有持续两个机器周期以上的高电平就能使单片机复位,因此上电复位的原
理就是利用电容充电的一段时间将复位脚拉至高电平,使单片机完成复位,C1 可以选用 104 或
105 之类的瓷片电容,R1 在电容充电结束后将复位脚拉至低电平,保证单片机正常工作。
3. ISP 下载接口,该下载接口在实际制作时可以用双排的 5*2 的排针代替,电路是根据标准的 ISP
下载线来设计的,与常用的并口下载线,串口下载线和笔记本用的 USBASP 下载线兼容,只需
将下载线接口插到本接口上就可以直接向单片机烧写程序,免去了不断拔插单片机芯片的烦恼,
这一点也是我一直向会员推荐的,无论是 51 还是 AVR 都非常方便。
ISP 的下载接口在设计时应注意以下两点,否则可能会造成程序下载的失败。
1. 下载线接口中的电源尽量和单片机共用一个电源。
2. 下载线接口中用到的 P1.5~P1.7 脚不要连接数码管等外部器件,如果要连接外部器件可以设计
为可插拔的方式,防止影响程序的下载,或者将 P1 口分配为读取按钮开关状态等方式。
对于下载线有几点说明:
1. 51 和 AVR 常用的是 ISP 下载方式,也就是上面介绍的接口,实物接口如图 3.4 所示,常用的有
分为并口下载线,串口下载线和 USB 下载线,一般台式机建议使用并口下载线,速度快而且稳
定,图 3.5 为并口下载线实物图。
2. 购买并口下载线时应注明 51/AVR ISP 下载线或 stk200/stk300 下载线,购买 USB 接口的下载线时
一般的名称为 USBASP,特别是在网上购买时应注意区分。

剩余67页未读,继续阅读
相关推荐


232 浏览量


cloudyhaveto2
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 初学者入门必备!Visual C++开发的连连看小程序
- C#实现SqlServer分页存储过程示例分析
- 西门子工业网络通信例程解读与实践
- JavaScript实现表格变色与选中效果指南
- MVP与Retrofit2.0相结合的登录示例教程
- MFC实现透明泡泡效果与文件操作教程
- 探索Delphi ERP框架的核心功能与应用案例
- 爱尔兰COVID-19案例数据分析与可视化
- 提升效率的三维石头制作插件
- 人脸C++识别系统实现:源码与测试包
- MishMash Hackathon:Python编程马拉松盛事
- JavaScript Switch语句练习指南:简洁注释详解
- C语言实现的通讯录管理系统设计教程
- ASP.net实现用户登录注册功能模块详解
- 吉时利2000数据读取与分析教程
- 钻石画软件:从设计到生产的高效解决方案
