深度学习解析:反卷积神经网络的逆向理解
需积分: 36 136 浏览量
更新于2024-09-08
收藏 8.91MB PDF 举报
"这篇论文探讨了深度图像表示的可逆性,通过反向操作来理解它们如何捕捉视觉信息。作者提出了一种通用框架,用于反转图像的编码表示,以此来重建原始图像,并对包括卷积神经网络(CNNs)在内的各种表示进行了分析。"
反卷积神经网络(Deconvolutional Neural Networks,简称FCNs)是一种在计算机视觉领域中用于图像分类和像素级预测的深度学习模型。传统CNN通常由卷积层(Convolutional Layers)和池化层(Pooling Layers)组成,其中卷积层负责提取图像特征,而池化层则降低数据维度,提高模型计算效率。然而,这种结构会导致图像的空间信息丢失,尤其是在经过最大池化后,无法恢复到原始图像的分辨率。
FCN的创新之处在于它引入了反卷积(也被称为转置卷积或上采样)来恢复空间信息。反卷积层并不是真正意义上的“反”卷积,而是通过扩大滤波器的步距和填充,使得输出尺寸比输入更大,从而实现特征图的上采样。这样,FCN能够在保持高精度分类的同时,恢复接近原始图像大小的输出,使得模型可以直接进行像素级别的预测任务,例如语义分割。
论文《通过反转理解深度图像表示》中,作者Aravindh Mahendran和Andrea Vedaldi提出了一个方法来反转图像的编码表示,以评估这些表示包含的视觉信息量。他们发现,不仅传统的特征表示如HOG(Histogram of Oriented Gradients)可以通过这种方法得到准确的重构,而且即使是复杂的CNN表示,也能被有效地反转。这表明,CNN的多层中都保留了不同程度的摄影真实感信息,尽管不同的层对图像的几何结构和细节的捕获程度不同。
通过反卷积,研究人员可以观察到CNN每一层是如何编码图像信息的,这对于理解和改进深度学习模型的内部工作原理非常有帮助。例如,某些层可能更侧重于捕获低级的纹理信息,而其他层可能则专注于高层的语义特征。这种分析有助于优化网络结构,提升模型的解释性和性能。
反卷积神经网络是深度学习在图像处理领域的一个重要突破,它通过反卷积层实现了对图像特征的上采样,从而能够进行像素级的预测。同时,通过反转和重建图像表示,我们可以更深入地理解CNN如何学习和表示视觉信息,这对未来的设计和优化提供了宝贵的洞察。
Understanding Deep Image Representations by Inverting Them
Aravindh Mahendran
University of Oxford
aravindh@robots.ox.ac.uk
Andrea Vedaldi
University of Oxford
vedaldi@robots.ox.ac.uk
Abstract
Image representations, from SIFT and Bag of Visual
Words to Convolutional Neural Networks (CNNs), are a
crucial component of almost any image understanding sys-
tem. Nevertheless, our understanding of them remains lim-
ited. In this paper we conduct a direct analysis of the visual
information contained in representations by asking the fol-
lowing question: given an encoding of an image, to which
extent is it possible to reconstruct the image itself? To an-
swer this question we contribute a general framework to
invert representations. We show that this method can invert
representations such as HOG more accurately than recent
alternatives while being applicable to CNNs too. We then
use this technique to study the inverse of recent state-of-the-
art CNN image representations for the first time. Among our
findings, we show that several layers in CNNs retain pho-
tographically accurate information about the image, with
different degrees of geometric and photometric invariance.
1. Introduction
Most image understanding and computer vision methods
build on image representations such as textons [17], his-
togram of oriented gradients (SIFT [20] and HOG [4]), bag
of visual words [3][27], sparse [37] and local coding [34],
super vector coding [40], VLAD [10], Fisher Vectors [23],
and, lately, deep neural networks, particularly of the convo-
lutional variety [15, 25, 38]. However, despite the progress
in the development of visual representations, their design is
still driven empirically and a good understanding of their
properties is lacking. While this is true of shallower hand-
crafted features, it is even more so for the latest generation
of deep representations, where millions of parameters are
learned from data.
In this paper we conduct a direct analysis of representa-
tions by characterising the image information that they re-
tain (Fig. 1). We do so by modeling a representation as a
function Φ(x) of the image x and then computing an ap-
proximated inverse φ
−1
, reconstructing x from the code
Φ(x). A common hypothesis is that representations col-
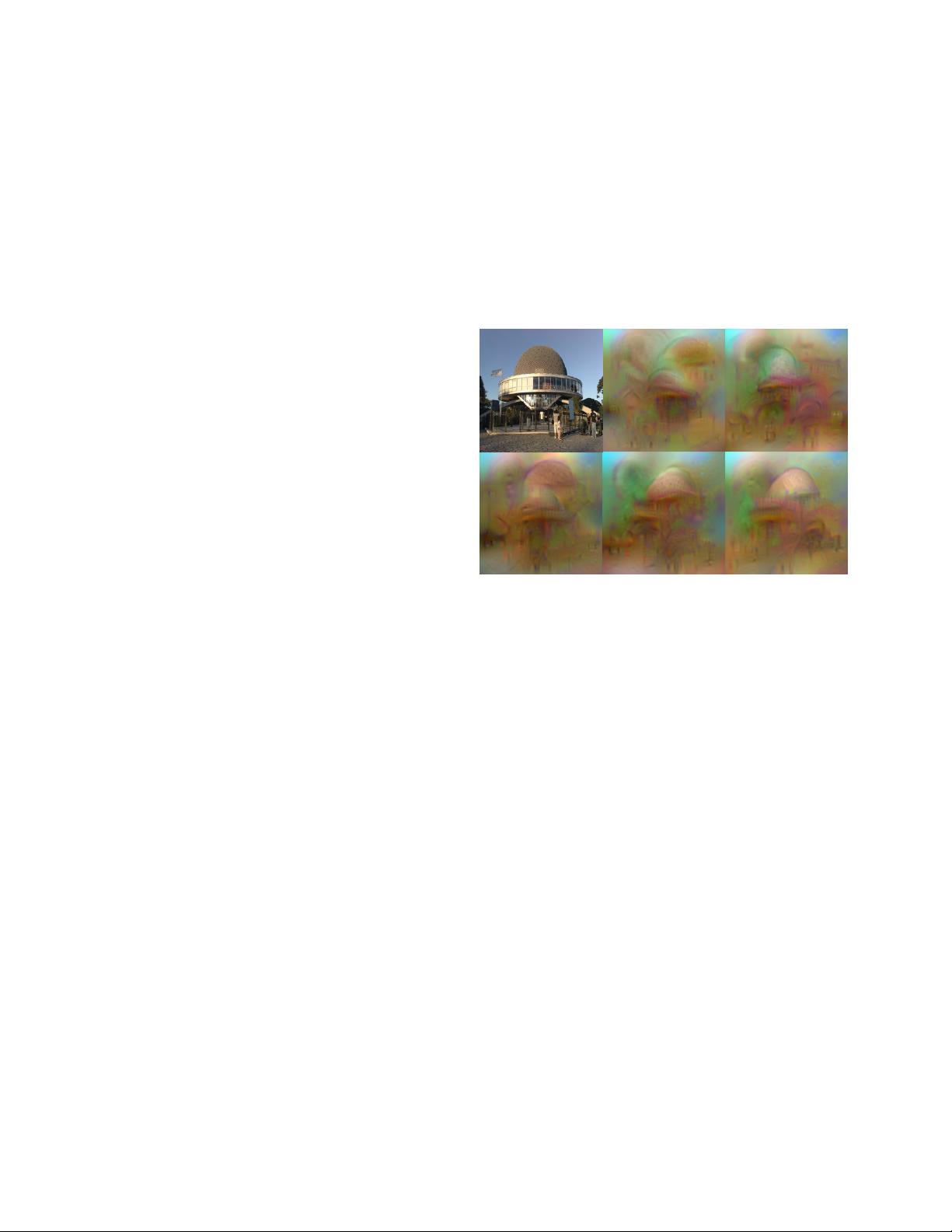
Figure 1. What is encoded by a CNN? The figure shows five
possible reconstructions of the reference image obtained from the
1,000-dimensional code extracted at the penultimate layer of a ref-
erence CNN[15] (before the softmax is applied) trained on the Im-
ageNet data. From the viewpoint of the model, all these images are
practically equivalent. This image is best viewed in color/screen.
lapse irrelevant differences in images (e.g. illumination or
viewpoint), so that Φ should not be uniquely invertible.
Hence, we pose this as a reconstruction problem and find
a number of possible reconstructions rather than a single
one. By doing so, we obtain insights into the invariances
captured by the representation.
Our contributions are as follows. First, we propose a
general method to invert representations, including SIFT,
HOG, and CNNs (Sect. 2). Crucially, this method uses only
information from the image representation and a generic
natural image prior, starting from random noise as initial
solution, and hence captures only the information contained
in the representation itself. We discuss and evaluate differ-
ent regularization penalties as natural image priors. Sec-
ond, we show that, despite its simplicity and generality, this
method recovers significantly better reconstructions from
HOG compared to recent alternatives [33]. As we do so,
we emphasise a number of subtle differences between these
representations and their effect on invertibility. Third, we
apply the inversion technique to the analysis of recent deep
CNNs, exploring their invariance by sampling possible ap-
proximate reconstructions. We relate this to the depth of the
representation, showing that the CNN gradually builds an
1
下载后可阅读完整内容,剩余8页未读,立即下载
2019-08-13 上传
2021-09-20 上传
2022-12-16 上传
2021-09-26 上传
2021-09-26 上传
2021-09-26 上传
点击了解资源详情

lzfzzu
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
