基于HALCON的双目立体视觉系统开发详解
该资源主要关注双目立体视觉技术,这是一种通过分析两个不同视角的图像来获取物体三维信息的方法。内容涵盖了双目视觉的基本概念、原理、应用领域以及如何使用HALCON这一机器视觉软件实现双目立体视觉系统。
双目立体视觉是机器视觉中的核心技术,它基于视差原理,通过两个摄像头从不同角度捕捉同一物体的图像,然后通过计算像素间的差异(即视差)来估算物体的深度信息。这种技术能够精确地确定物体的三维轮廓,为自动化和机器人领域的定位、导航、避障等问题提供解决方案。
在理论部分,双目视觉原理涉及到摄像机的基线距离b(两摄像机之间的距离)和焦距f。当一个空间点P在两个摄像机的图像中对应不同的像素坐标(P1(u1, v1)和P2(u2, v2)),通过三角几何关系可以计算出该点在三维空间中的坐标(xc, yc, zc)。这里的v1=v2是因为假设图像平面在同一平面上,简化了计算。
HALCON作为全球广泛应用的机器视觉软件,提供了包括双目立体视觉在内的多种高级算法,如Blob分析、形态学、模式识别、测量和三维摄像机定标等。HALCON的跨平台兼容性使其能够在Linux和Windows环境下使用,并支持多种编程语言进行接口,如C、C++、C#、Visual Basic和Delphi。此外,它还与各种图像采集硬件兼容,为开发者提供了便利,使得快速开发图像处理和机器视觉应用成为可能。
双目立体视觉的应用非常广泛,包括但不限于自动驾驶、无人机导航、工业检测、安防监控、3D建模等领域。通过对视差的精确计算,可以实现精确的物体识别、距离测量和三维重建,为这些领域的创新提供了强大的工具。
学习和掌握双目立体视觉技术,结合HALCON等专业软件,对于从事机器视觉开发的工程师来说,是提升工作效率和解决问题的关键。通过理解双目的基本理论和实践方法,开发者可以更好地应对复杂环境下的三维感知挑战。
双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任意
物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以应用
在多个领域。现说明介绍如何基于 HALCON 实现双目立体视觉系统,以及立体视觉的基本理
论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。
双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三
维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数
字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理
恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域
有着广泛的应用前景。
HALCON 是在世界范围内广泛使用的机器视觉软件。它拥有满足您各类机器视觉应用需
求的完善的开发库。HALCON 也包含 Blob 分析、形态学、模式识别、测量、三维摄像机定标、
双目立体视觉等杰出的高级算法。HALCON 支持 Linux 和 Windows,并且可以通过 C、C++、
C#、Visual Basic 和 Delphi 语言访问。另外 HALCON 与硬件无关,支持大多数图像采集卡及
带有 DirectShow 和 IEEE 1394 驱动的采集设备,用户可以利用其开放式结构快速开发图像处
理和机器视觉应用软件。
一.双目立体视觉相关基本理论说明
1.1 双目立体视觉原理
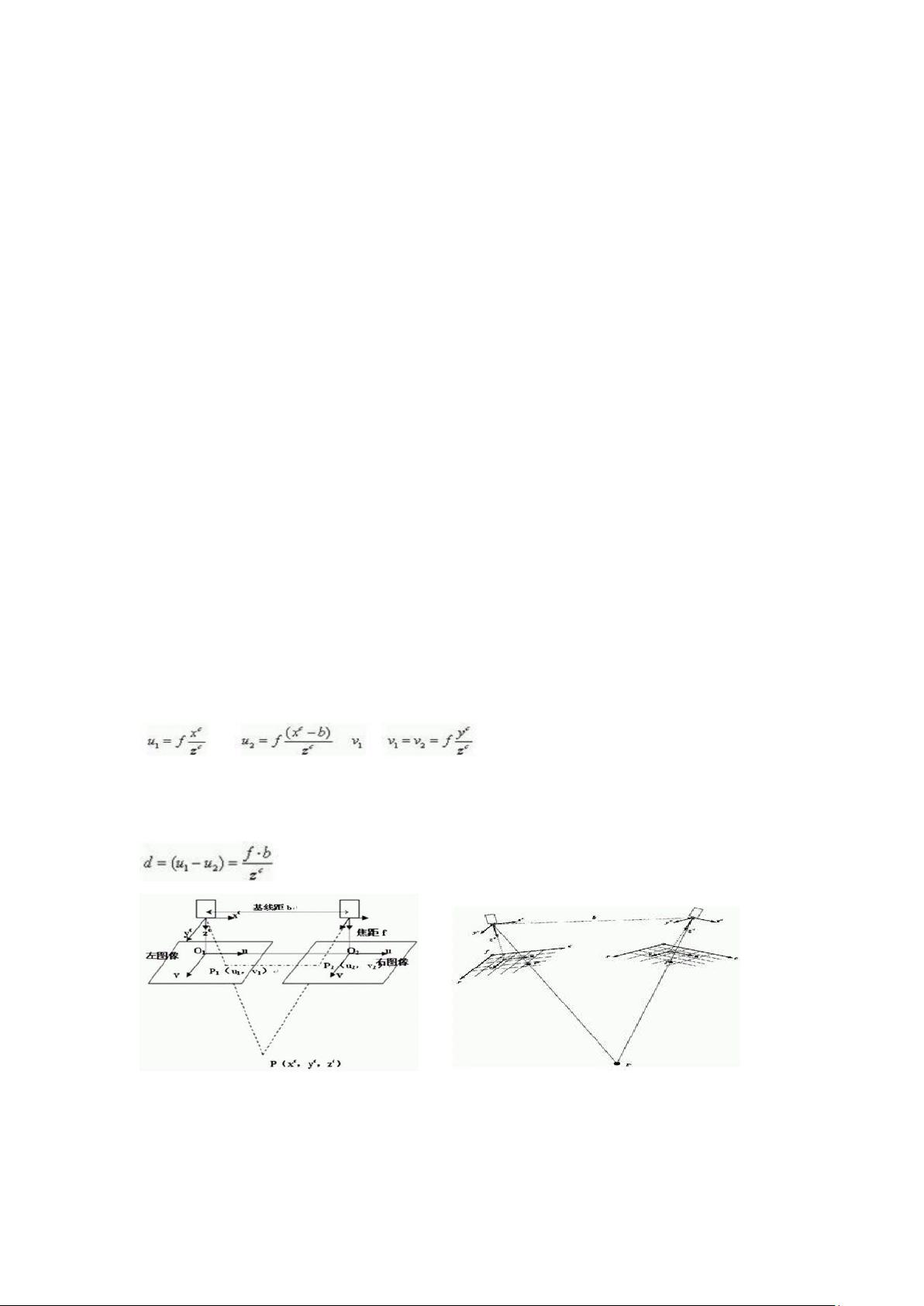
双目立体视觉三维测量是基于视差原理,图 1 所示为简单的平视双目立体成像原理图,
两摄像机的投影中心的连线的距离,即基线距为 b。摄像机坐标系的原点在摄像机镜头的光
心处,坐标系如图 1 所示。事实上摄像机的成像平面在镜头的光心后,图 1 中将左右成像平
面绘制在镜头的光心前 f 处,这个虚拟的图像平面坐标系 O1uv 的 u 轴和 v 轴与和摄像机坐
标系的 x 轴和 y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴
与平面的交点 O1 和 O2。空间中某点 P 在左图像和右图像中相应的坐标分别为 P1(u1,v1)和
P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点 P 图像坐标的 Y 坐标相同,即 v1=v2。
由三角几何关系得到:
上式中(xc,yc,zc)为点 P 在左摄像机坐标系中的坐标,b 为基线距,f 为两个摄像机
的焦距,(u1,v1)和(u2,v2)分别为点 P 在左图像和右图像中的坐标。
视差定义为某一点在两幅图像中相应点的位置差:
图 1 双目立体成像原理图 图 3 一般双目立体视觉系统原理图
由此可计算出空间中某点 P 在左摄像机坐标系中的坐标为:
下载后可阅读完整内容,剩余4页未读,立即下载
4573 浏览量
218 浏览量
2018-11-26 上传
907 浏览量

wxj_program
- 粉丝: 1
 我的内容管理
展开
我的内容管理
展开







最新资源
- 昆仑通态MCGS嵌入版_XMTJ温度巡检仪软件包解压教程
- MultiBaC:掌握单次与多次组批处理校正技术
- 俄罗斯方块C/C++源代码及开发环境文件分享
- 打造Android跳动频谱显示应用
- VC++实现图片处理的小波变换方法
- 商城产品图片放大镜效果的实现与用户体验提升
- 全新发布:jQuery EasyUI 1.5.5中文API及开发工具包
- MATLAB卡尔曼滤波运动目标检测源代码及数据集
- DoxiePHP:一个PHP开发者的辅助工具
- 200mW 6MHz小功率调幅发射机设计与仿真
- SSD7课程练习10答案解析
- 机器人原理的MATLAB仿真实现
- Chromium 80.0.3958.0版本发布,Chrome工程版新功能体验
- Python实现的贵金属追踪工具Goldbug介绍
- Silverlight开源文件上传工具应用与介绍
- 简化瀑布流组件实现与应用示例
