模糊PID控制:二自由度机械臂轨迹追踪与数学模型设计
版权申诉
本文主要探讨了多自由度机械臂控制算法的设计,特别是在二自由度机械臂领域的具体应用。机械臂作为现代机器人的重要组成部分,其运动控制的复杂性源于其非线性动力学特性,包括时变性、强耦合等。这些特性使得机械臂在军事制造、工业生产、日常生活和教育娱乐等多个领域的需求日益增长,尤其是在需要高精度、灵活性和大工作空间的任务中。
文章首先从基础理论出发,明确了机械臂是通过编程和自动控制来完成特定任务的装置,尤其关注了机械臂的关节型设计,这种设计决定了其输入驱动力和输出转动角度之间的复杂映射。机械臂的控制算法设计旨在实现对终端执行器运动轨迹的精确控制,以满足用户的各种作业任务需求。
模糊PID控制策略在这篇文章中占据了核心位置。模糊逻辑控制以其灵活性和自适应性而闻名,它能够处理非线性和不确定性,而经典PID(比例积分微分)控制则提供了卓越的精度。通过将模糊逻辑与PID控制相结合,设计出了一套能有效规划轨迹的算法。这套算法不仅要求能够追踪预设的参考输入,还必须对扰动输入有良好的抗干扰能力,确保输出稳定,无稳态误差。
在设计过程中,作者构建了二自由度机械臂的数学模型,这是实现控制的关键步骤。模型的建立有助于理解系统的动态行为,为控制算法的优化提供理论基础。MATLAB/SIMULINK软件在此过程中起到了关键作用,通过实际案例分析,验证了模糊PID控制算法的有效性和实用性。
总结来说,本文深入研究了多自由度机械臂控制算法的设计,特别是聚焦于模糊PID控制在二自由度机械臂中的应用,通过数学建模、轨迹规划和控制器设计,展示了这一控制策略在提高机械臂运动精度、灵活性和鲁棒性方面的优势。这不仅推动了机械臂技术的发展,也为实际应用提供了有价值的方法论支持。

毕业设计(论文)专用纸
第 3 页
2 机械臂控制系统概述
因为机械臂随着自由度个数的增大,控制系统的复杂程度加大,但是其基本
原理类似,所以本文主要以二自由度机械臂为例阐释多自由度的基本原理,
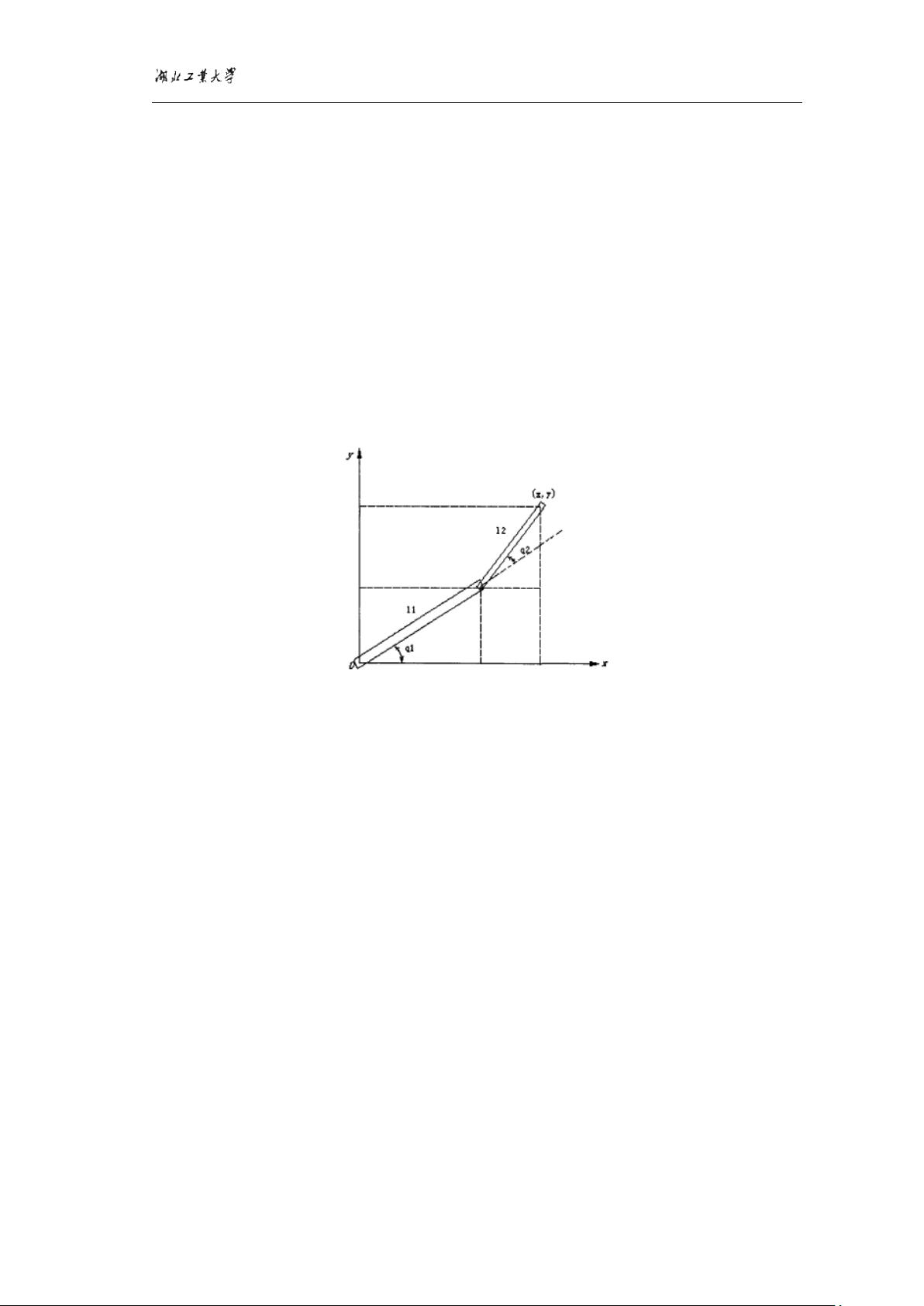
2.1 二自由度机械臂的动力学控制模型
机械臂的运动方式在运动空间上来分一般而言有两大类,即关节型和直角型。
各个关节的的运动直接取决于它的运动坐标,把全部的关节变量设为一个关节矢
量,全部的关节矢量组成的集合则为它的关节空间。通过控制所有关节的移动来
控制机器人的移动便为关节空间运动模式。机械臂终端对象的具体地点和角度一
般在直角坐标空间中表现出来,这种模式就是称为直角坐标运动模式,在这种运
动模式中,机械臂用户规定的任务是由机械臂末端对象在直角坐标空间中的移动
来实现的。
就操作者而言,直角坐标空间更为人们接受,故而在直角坐标空间中进行对
机械臂的操作。因此我们就要在关节坐标和直角坐标之间建立一一对应的数学约
束关系。换言之,如知道机械臂每一个关节的坐标常数,就需要求解它的终端在
直角坐标空间中的具体位置坐标,这个被叫做为运动学正解;反之,如知道它末
端在直角坐标空间的坐标就需要求解各个运动关节的坐标参数,这个则被称为运
动学反向解。
设
],...,,[
21 n
qqqq �
为机械臂在关节坐标空间中的变量,
...],,,[
�
zyxx �
为它
的终端对象在直角坐标空间中的具体位置坐标,那么它们两个之间的关系为:
0),( �qxF
(2.1)
上式是一个隐式方程,若能够从中求解出:
)(qfx �
(2.2)
那么直角坐标变量由关节坐标变量来定量表达,就能够得到机械臂的运动学正解。
通常而言,可以从式(2.1)得到它的的惟一正解,得到的正解为:
)(xgq �
(2.3)
剩余40页未读,继续阅读
214 浏览量
115 浏览量
208 浏览量
116 浏览量
2024-11-08 上传
148 浏览量
104 浏览量
196 浏览量

ohmygodvv
- 粉丝: 507
 我的内容管理
展开
我的内容管理
展开







最新资源
- 网狐工具:核心DLL和程序文件解析
- PortfolioCVphp - 展示JavaScript技能的个人作品集
- 手机归属地查询网站完整项目:HTML+PHP源码及数据集
- 昆仑通态MCGS通用版S7400父设备驱动包下载
- 手机QQ登录工具的压缩包内容解析
- Git基础学习仓库:掌握版本控制要点
- 3322动态域名更新器使用教程与下载
- iOS源码开发:温度转换应用简易教程
- 定制化用户登录页面模板设计指南
- SMAC电机在包装生产线应用的技术案例分析
- Silverlight 5实现COM组件调用无需OOB技术
- C#实现多功能画图板:画直线、矩形、圆等
- 深入探讨C#语言在WPF项目开发中的应用
- 新版2012109通用权限系统源码发布:多角色用户支持
- 计算机科学与工程系网站开发技术源码合集
- Java实现简易导出Excel工具的开发教程
