AMT离合器控制的智能自适应仿真优化:提升汽车性能
版权申诉
70 浏览量
更新于2024-06-19
收藏 2.73MB PDF 举报
本篇毕业论文深入探讨了基于ADAMS和MATLAB的AMT(Automated Manual Transmission,自动手动变速器)汽车离合器控制的研究与仿真。在当今汽车行业中,电控技术占据了主导地位,提升电控系统的性能对于汽车的研发至关重要。AMT作为机械式自动变速器的一种,其起步和换挡控制的精度直接影响到汽车的经济性、动力性、可靠性和驾驶体验。
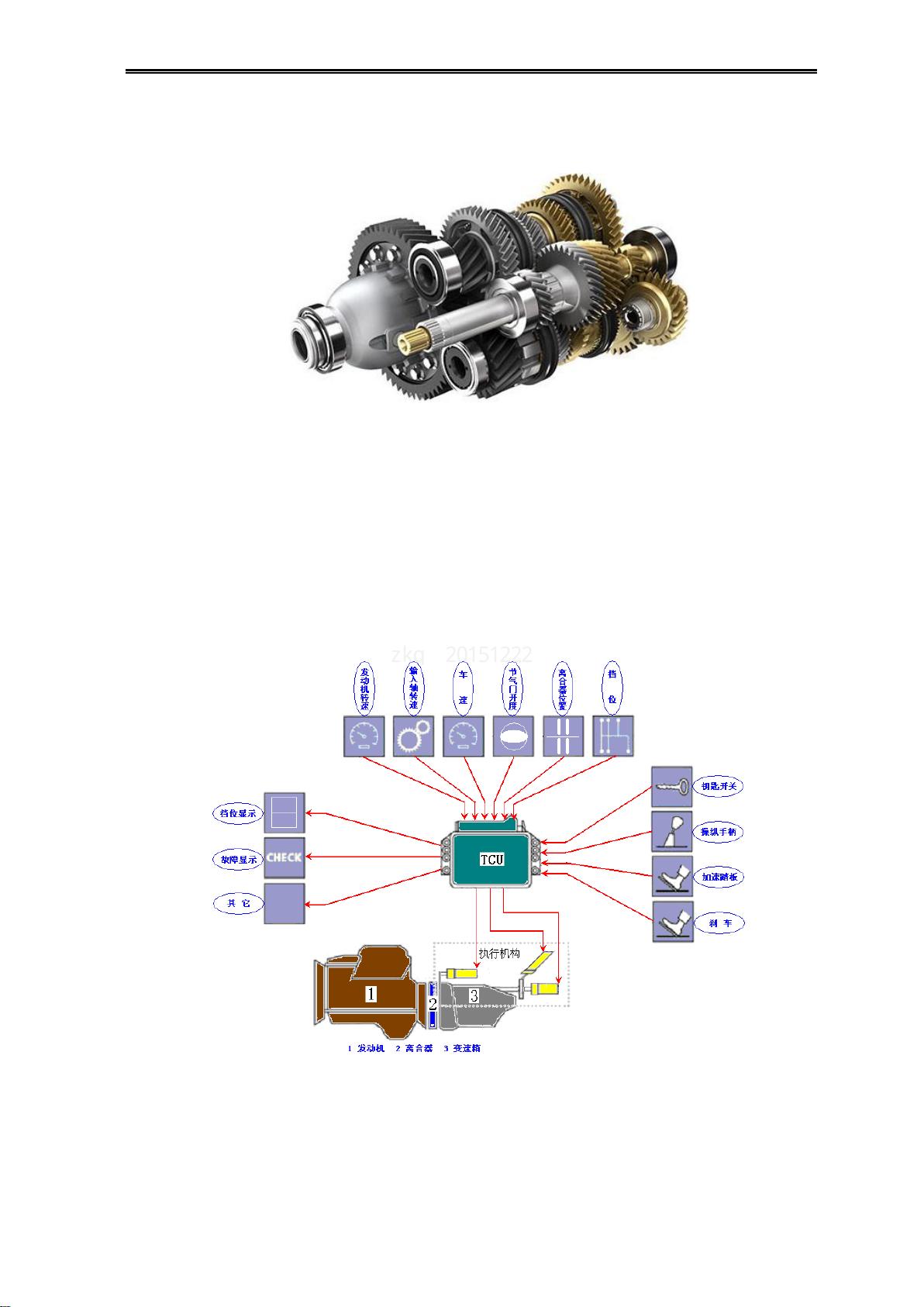
论文针对AMT汽车在实际运行中遇到的问题,如离合器控制不精确导致的磨损和车辆冲击,提出了针对性的解决方案。首先,研究者将离合器控制策略划分为决策层和执行层,其中决策层利用智能控制技术,通过识别驾驶员意图、车辆状态和环境因素,制定出符合控制策略的执行方案。执行层则依赖电机驱动执行机构,确保控制动作的快速且精确。
在起步控制方面,针对离合器接合过程的复杂性,论文提出了一种模糊自适应控制方法。这种方法结合模糊控制来处理不确定参数,通过自适应控制理论不断调整模糊控制规则,实现了离合器接合过程中的“快-慢-快”规律,有效减少了磨损和冲击。
在换挡控制上,论文着重分析了最佳换挡规律的特点,并研发了一种离合器模糊自校正PID控制方法,旨在提高换挡品质。通过建立包含换挡规律、行驶环境、驾驶员意图和目标档位判定模块的AMT汽车换挡过程模型,作者利用ADAMS软件和MATLAB/Simulink软件进行联合仿真,验证了在最佳动力性和最佳经济性换挡规律下,离合器模糊自适应控制策略的有效性和可行性。
这篇论文不仅深入解析了AMT离合器控制的关键技术,还展示了如何通过集成ADAMS和MATLAB进行系统仿真,优化控制策略,以提升汽车的整体性能。通过实证研究,论文为AMT汽车离合器控制的优化提供了有价值的方法和理论支持,对于汽车行业的发展具有重要的实践意义。

硕士学位论文
3
率最大的传动比 ,动 力性能 明显优 于其他 类型的自动变 速器 ;宽范 围的传 动比
可使发动机以 最佳的工 况工作 ,从而改 善燃烧过 程,降 低废气的 排放。
(3)CVT 的结构比较简单,而且零部件较 少,因此其质量和体积比 其他变速
器要小一些。
但 CVT 也有缺点,相比传统 自动挡 变速箱而 言,它 的成本要略高 ;如果操
作不当的话,出 问题 的概率 要高于 自动变速箱; 传动的 钢制 皮带能 够承受 的扭
矩有限,日系车目前 的上限值为 350 牛米,而奥 迪则将这 一上限 值提高至 400
牛米,如若需 要承受更 大的扭矩,就只 能改用传统的自 动变速箱 。
图 1.2 无级变速器 传动系示 意图
1.1.3 机械式自动变速器
机械式自动 变速器如图 1.3 所示,其工作 原理
[ 12]
其实很简单,是 传统手动
变速箱改 装而成 ,车辆在起 步和换挡时, 离合器 由液压泵控 制或电机控制 其分
离和接合,档位转换 也由液 压结构 或电机操作。 驾驶者 只需 要推拉排挡杆 来完
成升、降挡,自 动模 式下变 速箱的 控制会根据车 速、发 动机 负荷等 数据自 行切
换档位。从而获 得优 良的燃油经济 性与动 力性能以及平 稳起 步与迅 速换挡的能
力,以达到驾 驶员所期 望的结 果。其主 要优点是 :
(1)AMT 既具有普通自动 变速箱自 动变速的 优点,又保留了 原手动变速箱齿
轮传动的效率 高、成本 低、结 构简单、 易加工制 造的长 处。
(2)AMT 是在现手动变速 箱的基础 上进行改 造的,保留了绝 大部分原总成部
件,只改变其中 手动 操作系 统的换挡杆部 分,生 产继承 性好 ,改造的投入 费用
少,非常容易 被生产厂 家接受 。
(3)AMT 的性价比高,操纵 方便,节能环保,在一定 程度上能 够与 CVT、
AT 相媲美,与手动挡的车辆 相比,采用自 动控制提 高了驾驶 乐趣 ;与自动 挡的
车辆相比,其机构更 加简单,在四 类变速 器当中,其技 术难 度较低,是在 手动
变速器的基础 上改造而 成,因 此也继承 了手动挡 省油的 优势。
其主要缺点是 :
(1)换挡舒适 性不佳, 容易产生较为明 显的“顿挫感”。
(2)在换挡过 程中会产 生动力 中断,使 得换挡过程中极 速性能不好。
』‖〔? ? QOPTPQQQ

剩余80页未读,继续阅读
106 浏览量
139 浏览量
2023-10-29 上传
267 浏览量
156 浏览量
101 浏览量
272 浏览量
2024-11-01 上传
183 浏览量


icwx_7550592
- 粉丝: 20
- 资源: 7163
 我的内容管理
展开
我的内容管理
展开







最新资源
- 《Velocity1.4 模板使用指南中文版》
- 一些vfp实用代码如登录界面代码 打印代码
- ALV编程手册(An Easy Reference for ALV GRID CONTROL.)
- SVN操作入门指南.pdf
- 谭浩强_C++程序员设计_pdf(将各章整合都一起了)
- OpenDoc-CruiseControl.pdf
- DataWindow .net 汉化版 电子书
- 持续集成配置.pdf
- MT6228手机基带IC PDF档
- Const的所有用法by Dan Saks
- 深入浅出Struts 2.pdf
- AN INTRODUCTION TO STOCHASTIC
- web.xml详细配置说明
- javaweb ATA认证题库
- 整合Flex和Java--配置篇
- svn使用说明的PPT
