概率机器人学:探索不确定性
"Probabilistic Robotics" 是一本由Sebastian Thrun、Wolfram Burgard和Dieter Fox合著的专业书籍,被广泛认为是机器人学领域的经典之作,特别适合于研究和学习机器人技术的人群。Sebastian Thrun是谷歌无人车项目的重要创始人之一,因此这本书在自动驾驶和智能机器人领域具有极高的权威性。
该书主要探讨了机器人在面对不确定性时如何运用概率方法进行决策和感知。在机器人学中,不确定性是一个普遍存在的问题,它来源于传感器数据的噪声、环境的复杂性和模型的不精确性。作者们引入了概率机器人学的概念,这是一种利用概率理论来处理这些不确定性的方法,使得机器人能够更准确地理解和预测周围环境。
书中第1章介绍了不确定性在机器人学中的重要性以及概率机器人学的基本思想和影响。作者阐述了这本书的总体结构和内容概述,同时也提供了相关的文献参考。第2章深入讨论了递归状态估计,这是机器人定位和跟踪的关键技术。这一章涵盖了概率、状态、环境交互的基础概念,以及贝叶斯滤波器的原理和应用。通过数学推导,解释了贝叶斯滤波算法的工作机制,并对马尔科夫假设进行了讲解。此外,还探讨了表示和计算效率的问题,最后进行了总结并推荐了进一步阅读的资料。
第3章则聚焦于高斯滤波器,特别是卡尔曼滤波器。卡尔曼滤波器是线性高斯系统中最常用的滤波算法,用于处理系统状态的估计问题。书中详细解释了线性高斯系统的特性,以及如何通过卡尔曼滤波算法实现对这些系统的最优估计。这部分内容为后续章节的高级滤波器理论奠定了基础。
"Probabilistic Robotics" 这本书是机器人学和人工智能领域的一本重要教材,它不仅提供了理论框架,还包含了大量的实例和数学推导,对于理解和实践概率方法在机器人中的应用至关重要。无论是初学者还是经验丰富的专业人士,都能从中获益匪浅,深化对机器人决策与感知过程的理解。
4 Chapter 1
x
bel(x)
x
bel(x)
x
p(z|x)
x
bel(x)
x
bel(x)
x
p(z|x)
x
bel(x)
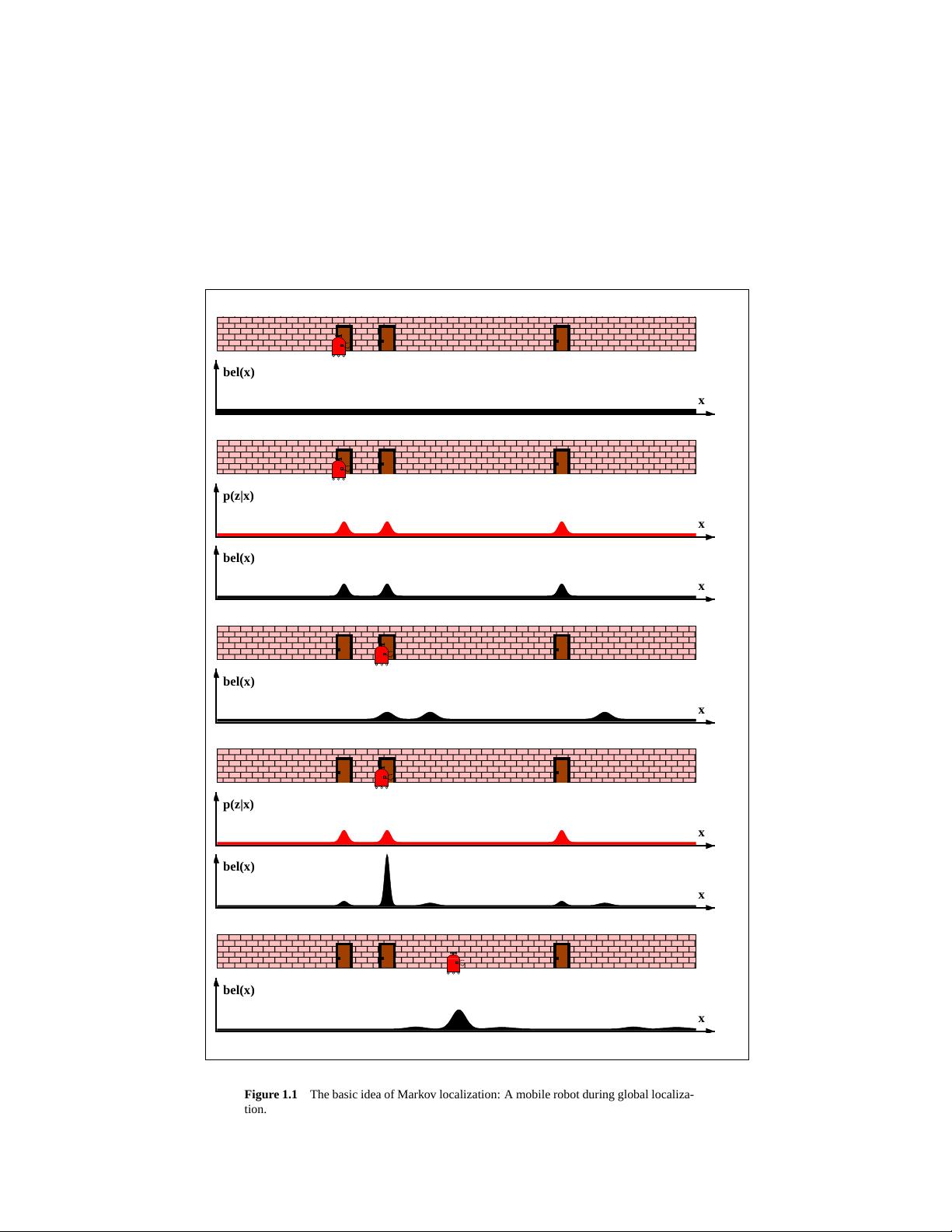
Figure 1.1 The basic idea of Markov localization: A mobile robot during global localiza-
tion.


剩余491页未读,继续阅读
2018-06-12 上传
2019-06-04 上传
2019-05-16 上传
2023-07-02 上传
2016-07-11 上传
2021-10-04 上传

qq_15386481
- 粉丝: 0
- 资源: 12
 我的内容管理
展开
我的内容管理
展开







最新资源
- JDK 17 Linux版本压缩包解压与安装指南
- C++/Qt飞行模拟器教员控制台系统源码发布
- TensorFlow深度学习实践:CNN在MNIST数据集上的应用
- 鸿蒙驱动HCIA资料整理-培训教材与开发者指南
- 凯撒Java版SaaS OA协同办公软件v2.0特性解析
- AutoCAD二次开发中文指南下载 - C#编程深入解析
- C语言冒泡排序算法实现详解
- Pointofix截屏:轻松实现高效截图体验
- Matlab实现SVM数据分类与预测教程
- 基于JSP+SQL的网站流量统计管理系统设计与实现
- C语言实现删除字符中重复项的方法与技巧
- e-sqlcipher.dll动态链接库的作用与应用
- 浙江工业大学自考网站开发与继续教育官网模板设计
- STM32 103C8T6 OLED 显示程序实现指南
- 高效压缩技术:删除重复字符压缩包
- JSP+SQL智能交通管理系统:违章处理与交通效率提升
