西门子S7-1200 CAN总线通信教程:从组态到编程详解
版权申诉
西门子S7-1200-CAN总线通信例程是一种在西门子S7-1200 PLC平台上实现CAN (Controller Area Network) 总线通信的技术。CAN总线是一种工业现场常用的串行通信标准,用于设备间的短距离、高速、可靠的数据交换。以下是一个详细的实施步骤:
1. **硬件组态**:
- 首先,确保PLC已正确连接CAN模块,并完成硬件配置。图1展示了相应的硬件接口和连接设置,包括可能涉及的电缆、终端电阻等。
2. **发送消息定义**:
- 在软件层面,需定义发送消息。用户可以根据需求创建多个消息,每个消息包含一个或多个变量,通过索引添加。图2中展示如何配置消息ID,建议根据目标设备的ID规范设置11位或29位。
3. **数据格式与字节顺序**:
- 消息ID设置后,需确定字节顺序,即数据在内存中的存储顺序。西门子S7-1200采用大端模式,但可根据需求选择小端模式。发送周期设置为100ms,确保数据定时发送。
4. **接收消息定义**:
- 同样,对于接收,需为预期接收到的消息创建索引,并配置接收数据的大小限制。图5至图7展示了接收消息的设置过程,包括消息ID的识别和变量表的关联。
5. **变量表定义**:
- 图8和图9展示了变量表的创建和管理,用于存储接收到的数据,并将其映射到PLC的内部数据结构。
6. **CAN库下载与配置**:
- 下载并导入CAN通信库到TIA Portal项目中,这是进行CAN通信编程的基础。图10和图11指导了库文件的导入及项目内集成的过程。
7. **CAN配置**:
- 在编程时,需要修改背景数据库(db)中的参数,如硬件标识符,确保与硬件配置一致。图12和图13详细展示了这一环节。
8. **激活通讯**:
- 一旦配置完毕,需要激活CAN通信功能,以便PLC可以开始进行发送和接收操作。图14展示了这一激活步骤。
9. **发送与接收数据**:
- 最后的步骤是实际的数据传输,图15展示了如何编写发送和接收数据的代码,这部分将具体实现PLC对CAN网络的控制和响应。
该例程提供了在西门子S7-1200 PLC上通过CAN总线进行通信的全面指南,涵盖了从硬件准备到软件编程的各个环节,确保了有效、可靠的通信连接。
西门子 PLC CAN 总线通信例程
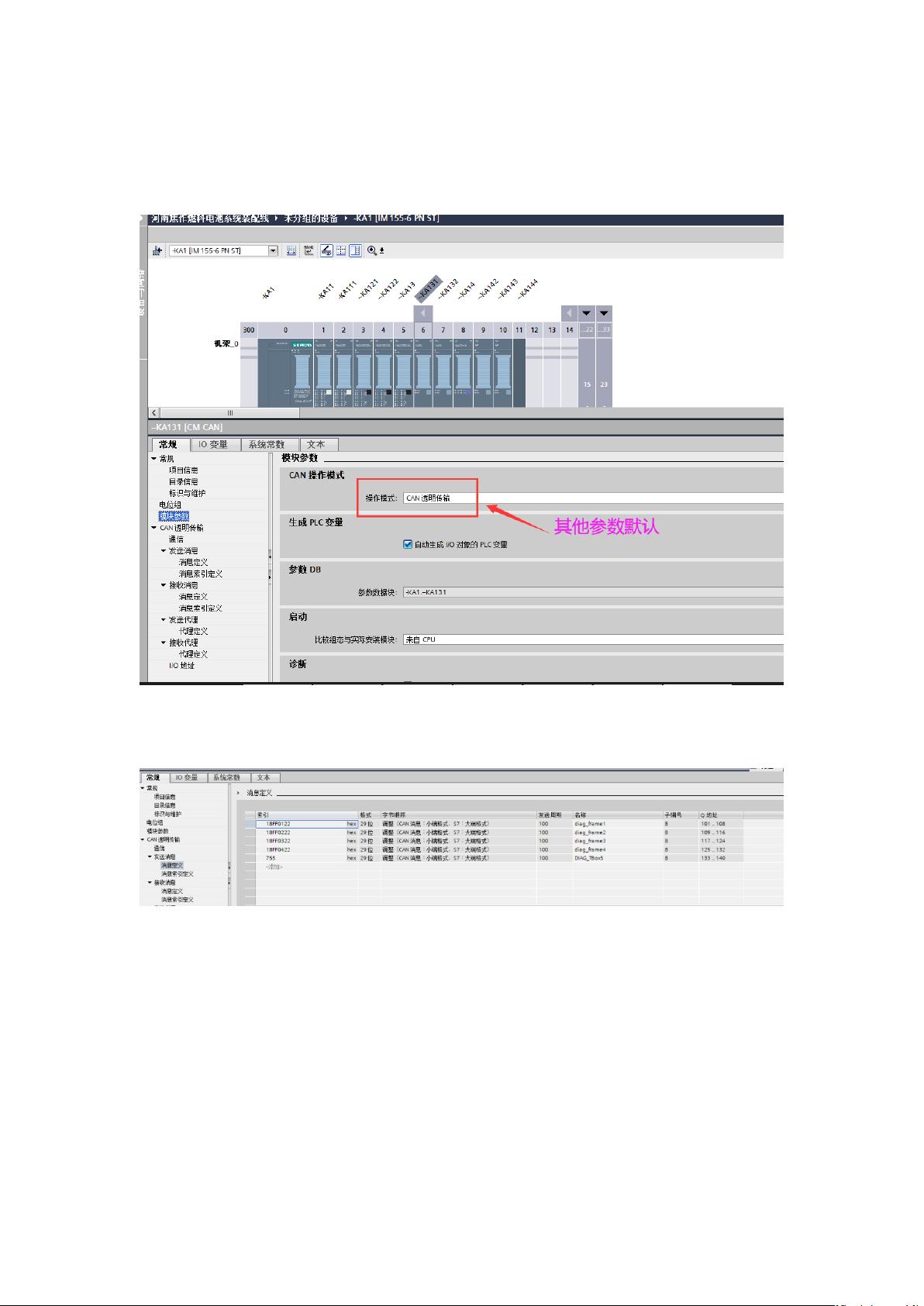
第一步 硬件组态:
图 1
第二步 设置发送消息定义:
图 2
这里你有多少消息需要发送,就在索引这里添加多少个,其他都先默认,不管它。
然后增加每一个消息的数据定义:
下载后可阅读完整内容,剩余7页未读,立即下载
4462 浏览量
304 浏览量
2024-10-30 上传
2024-10-30 上传
2024-10-30 上传
152 浏览量
199 浏览量

AAA_自动化工程师
- 粉丝: 7192
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握React项目创建与配置:DevOpsFE入门指南
- 电子应用程序开发:sample-electron-setup快速入门指南
- AK博客系统v4.2.8:轻量级优化与简易上手
- 物业行业十周年深度分析报告
- MATLAB仿真经典光伏并网模型及其电能质量影响分析
- Netlify Dotenv Exporter插件:轻松复制.env文件内容
- Gradle依赖管理指南:命令行下的高效操作
- 探讨CSS在genesis-main中的应用与成因
- 2023燃料电池产业发展深度分析报告
- Swift开发者的福音:qiita-swift API v2客户端使用指南
- Flutter框架与引擎核心源码解析
- 自动化下载:使用JavaScript从网址列表提取内容
- FixedTable插件:实现表格头部、左右侧固定功能
- Turbo-Django集成简介:Django与Hotwire Turbo早期结合
- 大炼油时代行业深度分析报告(37页)
- CartoDB共享地图解决方案:协作贡献新视角
