鲁棒估计:随机分布时滞与马尔可夫跳跃耦合神经网络
54 浏览量
更新于2024-08-26
收藏 1.1MB PDF 举报
"这篇研究论文探讨了具有参数不确定性、随机分布时滞和马尔可夫跳跃耦合的神经网络的鲁棒状态估计问题。在该论文中,采用多边形模型来描述参数不确定性,通过一组具有不同随机特性的伯努利过程来模拟分布时滞的随机出现。为了充分利用耦合信息,提出了基于局部耦合结构的新状态估计器。通过Kronecker乘积获得增广的估计误差系统,并引入了一个新的依赖于多边形不确定性及耦合信息的Lyapunov函数,以降低保守性。论文的主要贡献在于建立了一种更有效的鲁棒估计方法,适用于存在随机分布时滞和马尔可夫跳跃的复杂神经网络系统。"
在神经网络的研究中,鲁棒估计是一个关键问题,特别是当网络结构包含不确定性、随机时滞以及马尔可夫跳跃等复杂因素时。本论文的焦点在于解决这些挑战,以实现对神经网络状态的精确估计。
首先,论文提出采用多边形模型来处理参数不确定性。这种模型可以包容多种可能的参数值,提供了一种灵活的方法来描述实际系统中可能出现的变化和不精确性。
其次,随机分布时滞是神经网络动态行为中的一个常见特征,它可能导致系统的不稳定。通过伯努利过程,论文将时滞的随机性纳入模型,使得分析更具现实性。这一方法能够更好地捕捉实际系统中时滞随机出现的现象。
接着,论文设计了基于局部耦合结构的状态估计器。这种结构允许估计器利用网络内部的耦合信息,从而提高估计的准确性和效率。这在处理大型复杂网络时尤为重要,因为耦合效应往往影响网络的整体动态性能。
在分析过程中,论文使用Kronecker乘积来扩展估计误差系统。这是一种矩阵运算,可以有效地处理多个独立系统之间的耦合,简化了分析的复杂性。
最后,通过引入一个新的依赖于多边形不确定性及耦合信息的Lyapunov函数,论文降低了保守性,即在确保系统稳定性的同时,放宽了对估计器性能的严格要求。这种方法有助于在保持系统稳定的同时,提高估计的鲁棒性。
这篇论文为处理具有随机分布时滞和马尔可夫跳跃耦合的神经网络提供了理论基础和实用工具,对于理解和优化这类复杂系统的性能具有重要意义。同时,提出的估计策略可以为其他具有类似复杂性的系统提供参考,如自适应控制、滤波和预测等领域。
This article has been accepted for inclusion in a future issue of this journal. Content is final as presented, with the exception of pagination.
XU et al.: ROBUST ESTIMATION FOR NEURAL NETWORKS 3
is impacted by the ith component of x
j
(k) if the condition
r
i
= 0 holds.
Each nonlinear function g
j
(·), j ∈ ψ
N
in (1) is continuous,
bounded, g
j
(0) = 0, and there exist constants
¯
φ
j
and φ
j
,
satisfies the following inequality [40]:
φ
j
≤
g
j
(a) − g
j
(b)
a − b
≤
¯
φ
j
(4)
where a, b ∈ R,anda = b.
Each node randomly occurs the distributed delays indepen-
dently, which is denoted by β
i
(k), i ∈ ψ
N
with the following
stochastic properties:
E{β
i
(k) = 1}=β
i
E{(β
i
(k) − β
i
)
2
}=β
i
(1 − β
i
) β
∗
i
. (5)
The following convergent conditions of the constants μ
d
≥ 0
(d = 1, 2,...) hold:
+∞
d=1
μ
d
< +∞,
+∞
d=1
dμ
d
< +∞. (6)
Remark 1: Parameter uncertainty has been studied by many
researchers in the past several decades, since the accurate
model is always hard to be obtained in general situations,
and systems are frequently disturbed by the environment
noises [34]. It is worth noting that the polytopic uncertainty
describes the parametric uncertainty more precisely than the
norm-bounded one [36], thus studying coupled neural net-
works with polytopic uncertainty is important.
The parameter uncertain model has been used to describe
the networked induced issues. For instances, the norm-
bounded uncertainty has been used to handle the sensor
failure [41]; the polytopic uncertain model has been introduced
to deal with the quantization error [42]; and the multiplicative
noise model has been considered to model the channel fad-
ing [43]. Therefore, the condition of parameter uncertainty can
be extended to the coupled neural networks with communica-
tion constraints.
Remark 2: The kind of distributed delays has become an
interesting topic in the past decade, since it is unavoidable
in many situations [40]. Recently, the randomly occurring
distributed delays have been considered for the T-S fuzzy
systems [44]. In order to further address the randomly occur-
ring distributed delays in coupled neural networks, a set of
distributed delays with different occurring probabilities are
presented.
B. Local Coupling Structure-Dependent State Estimators
The following local coupling structure-dependent estimators
are proposed to estimate the states of coupled neural networks:
ˆx
i
(k + 1) = A
F
i
,ϑ
i
(α(k))
ˆx
i
(k) + B
F
i
,ϑ
i
(α(k))
y
i
(k)
ˆz
i
(k) = C
F
i
,ϑ
i
(α(k))
ˆx
i
(k) + D
F
i
,ϑ
i
(α(k))
y
i
(k), i ∈ ψ
N
(7)
where ˆx
i
(k) represents the state of the estimators. The
matrices A
F
i
,ϑ
i
(α(k))
, B
F
i
,ϑ
i
(α(k))
, C
F
i
,ϑ
i
(α(k))
,andD
F
i
,ϑ
i
(α(k))
are parameters of estimators, which need to be designed.
1 ≤ ϑ
i
(α(k)) ≤ s denotes the local variation of the coupling
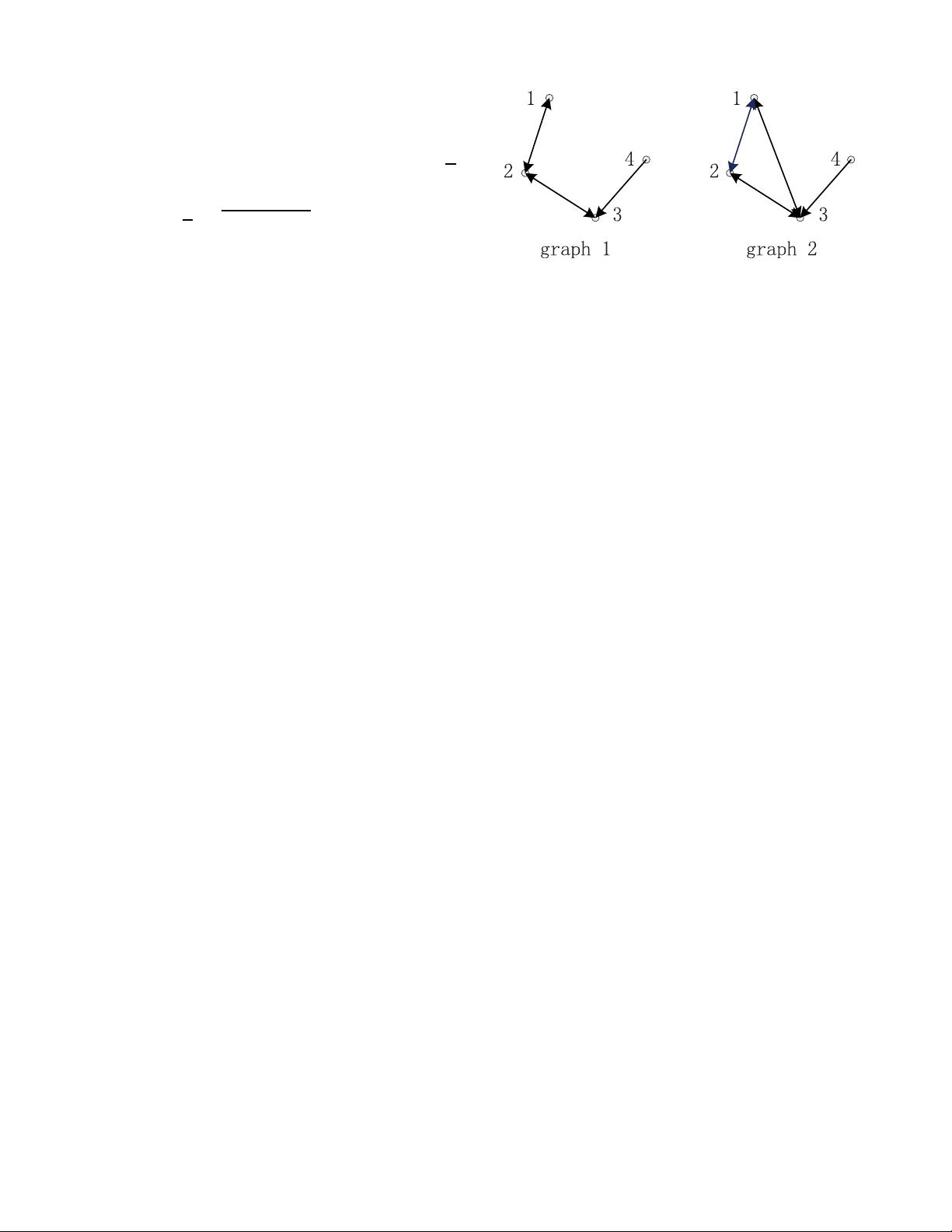
Fig. 1. Markovian jump coupling.
condition of the ith neural networks. For example, we consider
a random coupling, which jumps between two states, as shown
in Fig. 1 (i.e., graph 1 and graph 2), where nodes 2 and
4 have the same neighbors for both cases, which means
ϑ
i
(α(k)) = 1fori = 2, 4. However, for nodes 1 and 3, the
neighbors are varying with α(k),thatis,ϑ
i
(α(k)) ∈{1, 2}
for i = 1, 3.
Remark 3: For the coupled systems (i.e., distributed sys-
tems, multiagent systems, and complex networks), the con-
nections among the nodes are always unreliable caused by the
communication constraints, such as packet dropouts, transmis-
sion delays, and so on. This phenomenon motivates people
to study the time-varying connection for coupled systems,
and the Markovian jump coupling is a classic one. In [45],
the coupling-independent controller has been proposed. How-
ever, for Markovian jump systems, how to make full use of
the Markov chain information to design a less conservative
estimator is an important issue. Note that each node cannot
obtain entire coupling information. Thus, a new structure
estimator called local coupling structure-dependent estimator
is presented, where the parameters of the estimator depend on
the local coupling structure.
C. Estimation Error System
Coupled neural networks with randomly occurring distrib-
uted delays (1) can be rewritten as the following augmented
form:
⎧
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎨
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎪
⎩
x(k + 1) = (
¯
A(θ) + W
α(k)
⊗ )x(k) +
¯
B(θ)G(x(k))
+β
¯
F(θ )
+∞
d=1
μ
d
G(x(k − d)) +
¯
E(θ )v(k)
+
N
i=1
(β
i
(k) − β
i
)
¯
I
i
¯
F(θ )
+∞
d=1
μ
d
G(x(k − d))
y(k) =
¯
C(θ)x(k) +
¯
D(θ)v(k)
z(k) =
¯
L(θ )x(k)
(8)
where
x(k) =[x
1
(k)
T
x
2
(k)
T
... x
N
(k)
T
]
T
y(k) =[y
1
(k)
T
y
2
(k)
T
... y
N
(k)
T
]
T
z(k) =[z
1
(k)
T
z
2
(k)
T
... z
N
(k)
T
]
T
G(x(k)) =[g(x
1
(k))
T
g(x
2
(k))
T
... g(x
N
(k))
T
]
T
剩余10页未读,继续阅读
2021-02-22 上传
2021-09-27 上传
2021-03-03 上传
2021-03-08 上传
2021-05-27 上传
2021-05-18 上传
2021-05-11 上传
2021-03-08 上传
2021-03-13 上传

weixin_38750644
- 粉丝: 5
- 资源: 907
 我的内容管理
展开
我的内容管理
展开







最新资源
- Effective C++ 第2版(中文版).pdf
- verilog+HDL.pdf
- 汇编DEBUG命令使用解析及范例大全
- Instructor’s Solution Manual
- 2010年英语考研大纲词汇
- 华为笔试题含答案 [C]
- 游戏编程之单例类与对象工厂的简单介绍与实现
- ARM嵌入式WINCE实践教程 pdf
- linux系统移植(很详细的移植文档哦) pdf
- 系统托盘Shell_NotifyIcon
- mfc实现系统托盘c++
- VERILOG快速入门
- 《计算机应用基础》习题参考答案.doc
- CC1110中文资料(无线部分)
- ExecutableLinkableFormat.pdf
- 笔记本电脑维修指导手册
