TI DRV2605: I2C智能触控驱动器,具备专利回放引擎与特性
需积分: 9 164 浏览量
更新于2024-06-29
4
收藏 2.86MB PDF 举报
TI-DRV2605是一款高度集成的电子元件,专为具有内置库和智能环路架构的触觉反馈或振动驱动器设计,如线性谐振致动器(LRA)和偏轴转动惯量电机(ERM)应用。该驱动器的关键特性包括:
1. **灵活触控反馈与智能控制**:
- 支持LRA和ERM,提供定制化的触觉体验,能够适应不同类型的设备,如手机、平板电脑、手表等。
- 内置Immersion™ TouchSense®2200特性,允许集成 Immersion 效果库,实现音频到氛围的效果,提升用户交互的沉浸感。
2. **数字回放引擎与I2C接口**:
- 驱动器采用I2C接口进行控制,提供实时回放模式,便于远程控制和设备配置,增强系统的扩展性和灵活性。
3. **智能环路架构**:
- 包括自动过驱/制动功能,确保在ERM/LRA工作时的稳定性能。
- 自动谐振跟踪功能,使得LRA能够精确地响应设备运动。
- 动态诊断能力,有助于检测和处理致动器问题。
- 水平校准功能,确保设备在不同环境下的准确操作。
4. **多模式驱动与控制选项**:
- 提供可调占空比PWM输入,以及模拟输入控制,允许用户根据需求调整输出特性。
- 可选的硬件触发输入,增强外部信号的响应能力。
- 高效的输出驱动,保证设备的性能表现。
5. **快速响应与电源管理**:
- 快速启动时间和电源电压下的连续加速,确保设备迅速响应和稳定的能源利用。
- 兼容1.8V电源,具备宽泛的VDD电压容限,适用于多种系统电压。
6. **广泛的应用领域**:
- 驱动器广泛应用于手机、平板电脑、智能手表、远程控制设备以及支持触觉反馈的人机交互界面,包括鼠标和其他外设。
7. **专利保护与重要声明**:
- 技术文档中包含了关于产品可用性、保修政策、安全关键应用使用、知识产权声明及法律免责声明等重要信息,用户在使用前需仔细阅读。
TI-DRV2605是一款创新的触觉驱动解决方案,其智能化、灵活控制和高效性能使其成为现代电子设备中不可或缺的组件。

11
DRV2605
www.ti.com.cn
ZHCSCW9E –DECEMBER 2012–REVISED APRIL 2018
Copyright © 2012–2018, Texas Instruments Incorporated
7.3 Feature Description
7.3.1 Support for ERM and LRA Actuators
The DRV2605 device supports both ERM and LRA actuators. The ERM_LRA bit in register 0x1A must be
configured to select the type of actuator that the device uses.
7.3.2 Smart-Loop Architecture
The smart-loop architecture is an advanced closed-loop system that optimizes the performance of the actuator
and allows for failure detection. The architecture consists of automatic resonance tracking and reporting (for an
LRA), automatic level calibration, accelerated startup and braking, diagnostics routines, and other proprietary
algorithms.
7.3.2.1 Auto-Resonance Engine for LRA
The DRV2605 auto-resonance engine tracks the resonant frequency of an LRA in real time, effectively locking
onto the resonance frequency after half of a cycle. If the resonant frequency shifts in the middle of a waveform
for any reason, the engine tracks the frequency from cycle to cycle. The auto-resonance engine accomplishes
the tracking by constantly monitoring the back-EMF of the actuator. The auto-resonance engine is not affected by
the auto calibration process, which is only used for level calibration. No calibration is required for the auto
resonance engine. See the Auto-Resonance Engine Programming for the LRA section for auto-resonance engine
programming information.
7.3.2.2 Real-Time Resonance-Frequency Reporting for LRA
The smart-loop architecture makes the resonant frequency of the LRA available through I
2
C (see the LRA
Resonance Period (Address: 0x22) section). Because frequency reporting occurs in real time, the frequency
must be polled while the DRV2605 device synchronizes with the LRA. The data should not be polled when the
actuator is idle or braking.
7.3.2.3 Automatic Overdrive and Braking
A key feature of the DRV2605 is the smart-loop architecture which employs actuator feedback control for both
ERMs and LRAs. The feedback control desensitizes the input waveform from the motor-response behavior by
providing automatic overdrive and automatic braking.
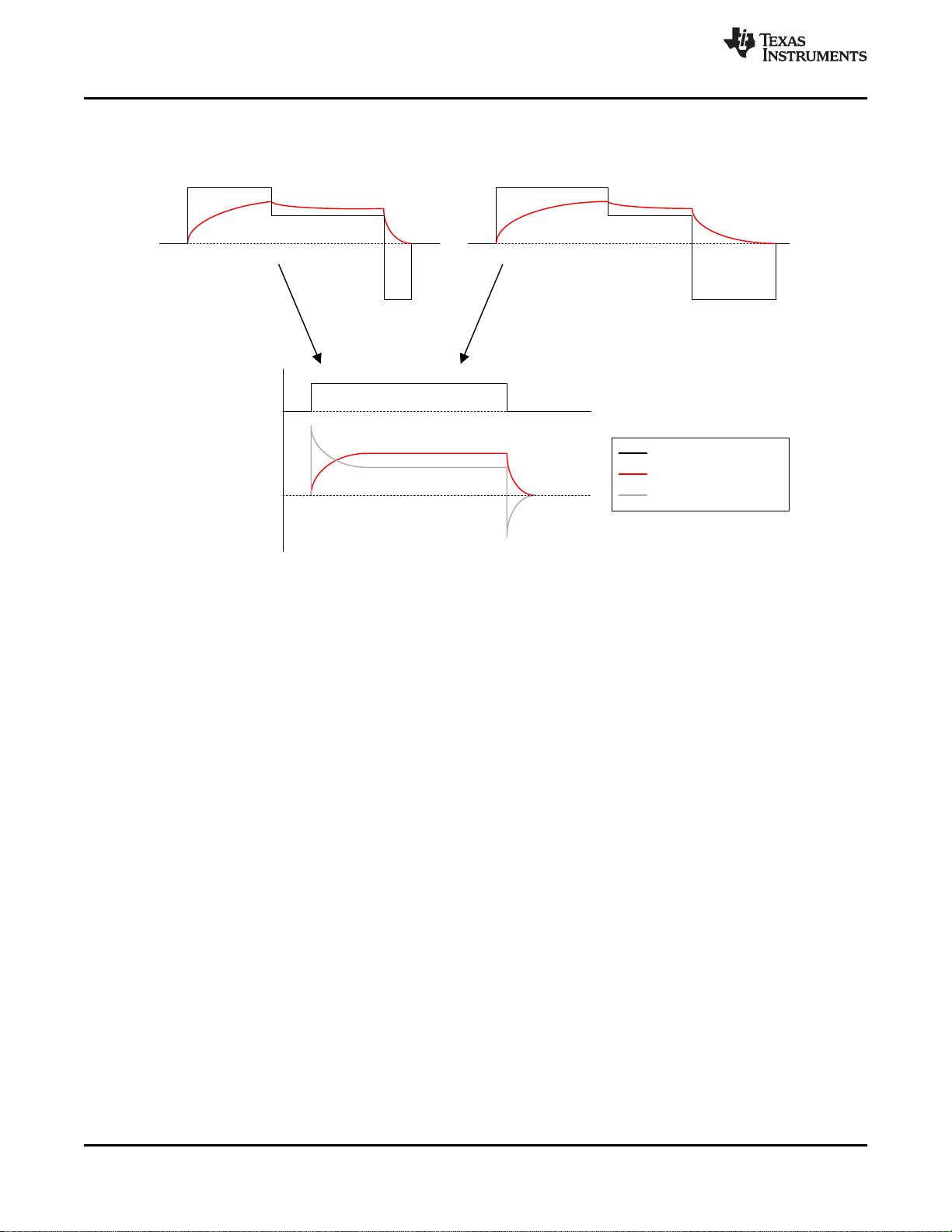
An open-loop haptic system typically drives an overdrive voltage at startup that is higher than the steady-state
rated voltage of the actuator to decrease the startup latency of the actuator. Likewise, a braking algorithm must
be employed for effective braking. When using an open-loop driver, these behaviors must be contained in the
input waveform data. Figure 11 shows how two different ERMs with different startup behaviors (Motor A and
Motor B) can both be driven optimally by the smart-loop architecture with a simple input for both motors. The
smart-loop architecture works equally well for LRAs with a combination of feedback control and an auto-
resonance engine.

剩余65页未读,继续阅读
2024-12-26 上传

不觉明了
- 粉丝: 6345
- 资源: 5764
 我的内容管理
展开
我的内容管理
展开







最新资源
- brain:脑肿瘤检测-matlab开发
- KaarPux:KaarPux-从源代码构建Linux / GNU / GNOME-开源
- web1
- burger-main.zip
- dazi:Html5仿金山打字原始码
- Windows Mobile:禁用触摸输入
- NimOculusRiftExample:用 Nim 编写的简单 Oculus Rift 示例
- 安卓建工计算器v4.0高级版.txt打包整理.zip
- 数码管局部闪烁_单片机C语言实例(纯C语言源代码).zip
- diffpak:巨大的文件阻碍了差速压缩机-开源
- Supah-Framework:会让你无聊死的极简PHP框架
- vue-iview-Interpretation:个人对iviewUI框架原始代码的解读,不喜欢勿喷
- 安卓应用备份还原v6.9.1纯净版.txt打包整理.zip
- 熟食
- Windows Mobile:实现信息亭模式
- OOPII:OOP-II练习
