摄影测量基础:从传统到现代的知识解析
需积分: 5 147 浏览量
更新于2024-08-03
收藏 1.53MB DOCX 举报
"该资源为一份关于基础摄影测量的知识点及习题总结的PDF文档,包含摄影测量的基础概念、公式、课后习题以及相关图像。适用于学习和复习摄影测量学,尤其适合初学者和教育用途。"
在摄影测量领域,理解和掌握基本概念至关重要。摄影测量的传统定义强调通过摄影获取和分析构象信息来了解对象,而现代定义则扩展到包括遥感技术,涉及更广泛的数据源和更高的处理效率。摄影测量学的主要任务是确定图像上的同名点并建立影像与现实世界之间的精确几何关系。这一过程是非接触式的,能够动态地获取大量细节信息。
量测用相机具有特殊特性,如固定的像距(主距),内方位元素已知,以及较小的畸变,确保测量的准确性和精度。在传统的航空摄影测量中,要求特定的摄影比例尺、重叠度和飞行高度等,以确保数据的完整性和模型构建的连贯性。重叠度的存在是为了覆盖整个测区、避免摄影漏洞,并在空三(空间三度测量)中连接模型。
4D产品是摄影测量与遥感的重要成果,包括数字线划地图(DLG)、数字栅格地图(DRG)、数字地形模型(DTM,包括DEM和DSM)以及数字正射影像(DOM)。这些产品提供了丰富的地理信息,其中DTM(DEM或DSM)是通过摄影测量与遥感独有的方式获取的。
在摄影测量基础部分,了解针孔成像原理和中心投影的概念至关重要。中心投影和正射投影的区别在于光线的汇聚点和投影方式。竖直摄影和正直摄影则涉及主光轴与基准面的相对角度,前者近似垂直,后者严格垂直。
此外,一些关键术语的定义包括:像主点是影像的光轴与影像平面的交点,像底点是相机的光学中心点,主合点是物方主点与像方主点的对应点,等角点是投影光线与像平面成90度角的点,主距是像底点到像主点的距离,航高是摄影时飞机的高度,主垂面是与主光轴垂直的平面,主纵线则是沿主光轴方向的线。
这份资源中的习题涵盖了这些知识点,是学习者巩固理论知识和实践技能的理想材料。通过解答这些问题,学习者可以深化对摄影测量的理解,提高实际应用能力。
第一章 绪论
1. 摄影测量(Photogrammetry)的传统定义与现代定义有什么联系与不同?
传统定义:对研究的对象进行摄影,根据所获得的构象信息,从几何方面和物理方面加以
分析研究,从而对所摄对象的本质提供各种资料的一门学科。(测绘地形图、获取各种基础地
理数据)
现代定义:摄影测量与遥感是对非接触传感器系统获得的影像及其数字表达进行纪录、量
测和解译的过程,获得自然物体和环境的可靠信息的一门工艺、科学和技术。
联系:都是通过影像获取物体信息。
不同:现代摄影测量的图像类型范围更广,效率更高。
2. 摄影测量学的最基本任务:解决对应同名点问题、严格建立影像与被摄物体间的几何关系。
3. 摄影测量学的特点:非接触性、动态获取信息、细节信息更丰富。
4. 量测用相机的特性:像距固定不变是主距(几乎等于物镜焦距)、相片上有框标(数字形式
隐含)、内方位元素已知、畸变小、结构精密等。
5. 传统航空摄影测量对空中摄影形式的要求:合适的摄影比例尺;航高差小于
5%
;航向重叠
60%
以上、旁向重叠
30%
以上;航带弯曲小于
3%
;旋片角小于
6°
;(主光轴竖直等)。
为什么要有重叠度?:①重叠区覆盖整个测区(立体测图的需要);②防止出现摄影漏洞
(这样就不能用于测图);③在空三的时候用于连接相邻模型,补充性的地面控制。
6. 4D 产品?其中哪种产品只能通过摄影测量与遥感的方式获取?
DLG 数字线划地图,DRG 数字栅格地图,DTM 数字地形模型(DEM、DSM),DOM 数
字正射影像。
第二章 摄影测量基础
1. 针孔成像原理:光线沿直线传播,光从物体经过小孔到达屏幕形成倒立的实像,满足像点、
针孔、物点三点共线。
2. 框幅式影像成像的基本原理:满足中心投影原理,即物点、像点、投影中心三点共线。
3. 中心投影(orthographic projection)与正射投影(perspective projection)的区别:中心投影的光
线会聚于一点(投影中心);正射投影的投影光线互相平行且与投影平面正交。
4. 竖直摄影(Nominally vertical photographs)与正直摄影(Vertical photographs)的区别:
竖直摄影主光轴近似垂直于基准面(像片倾角为
2
°~
3
°
);正直摄影主光轴严格垂直于基准面。
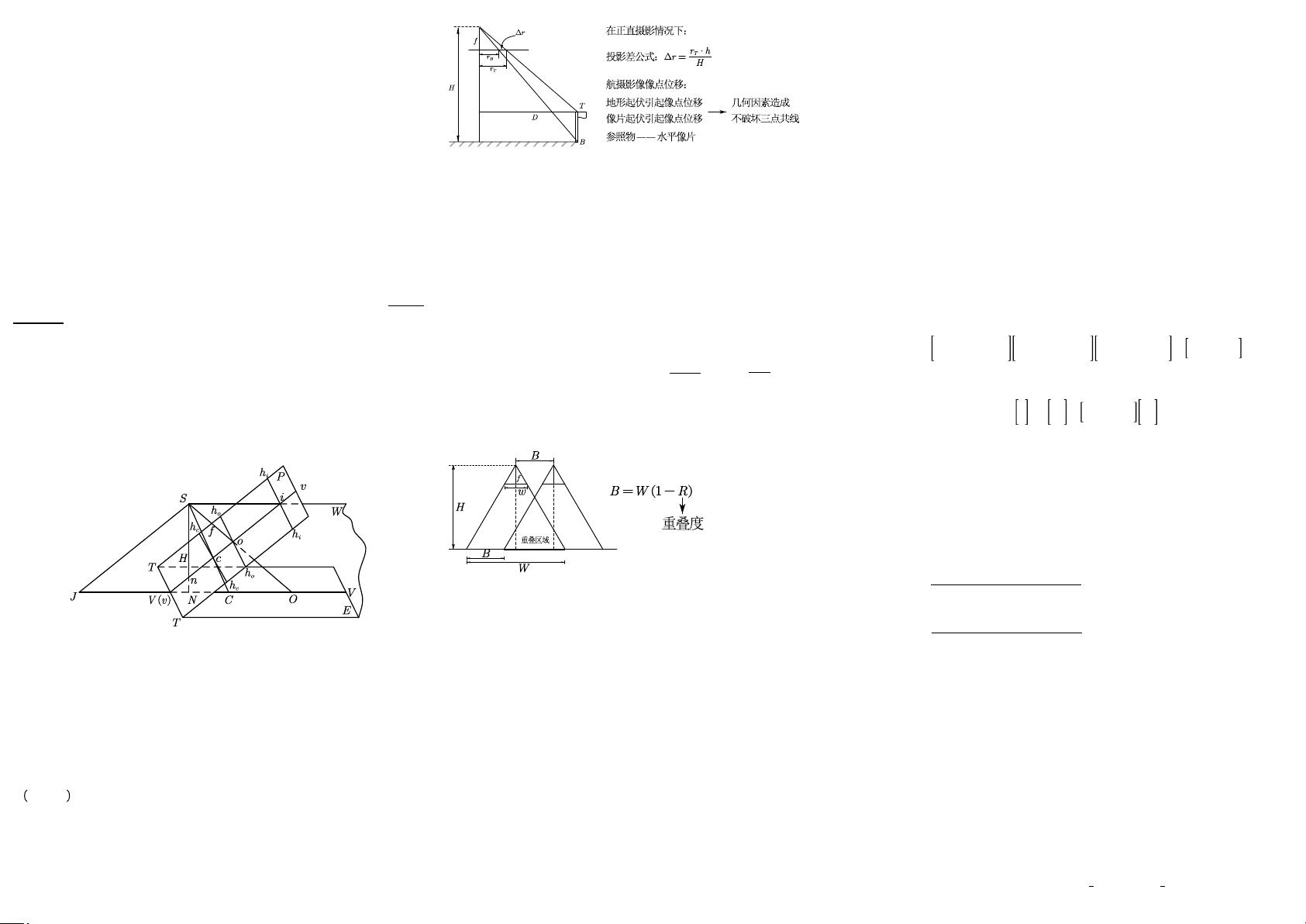
5. 像主点、像底点、主合点、等角点、主距、航高、主垂面、主纵线。
像主点——
𝑜
,像底点——
𝑛
,主合点——
𝑖
,等角点——
𝑐
,主距——
𝑓
,航高——
𝐻
,主垂面—
—
𝑊
,主纵线——
𝑣𝑣
。
补充:主遁点——
𝐽
,基准面——
𝐸
,相片面——
𝑃
,摄影方向线——
𝑉𝑉
,透视轴——
𝑇𝑇
,主横
线——
ℎ
𝑜
ℎ
𝑜
,地平线——
ℎ
𝑖
ℎ
𝑖
,等比线——
ℎ
𝑐
ℎ
𝑐
。
6. 投影差(relief displacement)的定义与计算:中心投影中,地面点因地形起伏引起的像点位移。
与物体的高度、物体与像底点的距离有关。由于中心投影引起的像点位移。
7. 中心投影影像上受地形起伏影响较小的区域:像底点附近区域。
8. 比例尺不受相片倾斜的影响的区域:等比线的构象比例尺等于水平像片的摄影比例尺,不受
像片倾斜影响。
9. 主距(principal distance)、像距(image distance)、焦距(focal length)的联系与区别?内方位元
素
𝒙
𝟎
,
𝒚
𝟎
,
−
𝒇
中的
𝒇
为哪个?
主距为物镜后节点到相片主点的垂距。对于量测用相机才有主距的概念,在相距固定的情
况下,主距为像距。对于航空摄影测量,物距远大于像距,所以像距可以看成不变的定值,几
乎等于焦距。对于近景相机,主距比像距大而且会随着焦距改变。焦距是透镜的一个参数。
𝑓
为主距。
10. 常用坐标系:
①像平面坐标系
𝑜−𝑥𝑦
:以像主点为原点,坐标系方向和框标坐标系的方向相同;(Image
Coordinate System)
②像空间坐标系
𝑆−𝑥𝑦𝑧
:坐标原点为投影中心,
𝑧
轴为主光轴,
𝑥
、
𝑦
轴与像平面坐标系平
行;(Image Space Coordinate System)
③像空间辅助坐标系
𝑆−𝑋𝑌𝑍
:以投影中心为原点,轴系的选择视条件而定(与第一张像
片的像空间坐标系平行;
𝑋
与摄影基线平行等);(auxiliary Space Coordinate System)
④摄影测量坐标系
𝐴−
𝑋
𝑃
𝑌
𝑃
𝑍
𝑃
:以地面上某点 A 为坐标原点,坐标轴与像空间辅助坐标系
平行;(photogrammetric coordinate system)
⑤物空间坐标系
𝑂−
𝑋
𝑡
𝑌
𝑡
𝑍
𝑡
:大地坐标系,为左手系,与大地测量中的高斯克吕格平面坐
标系相同,高程以黄海高程系统为基准。(object Space Coordinate System)
11. 左右视差(Parallax):左右视差是由于观察者位置的偏移而导致像片上物体位置的偏移,
计算公式为:
𝑝
=
𝑥
𝑙𝑒𝑓𝑡
−
𝑥
𝑟𝑖𝑔ℎ𝑡
。(沿航线方向的坐标之差)
利用两点间高差与视差的关系可以计算高差:
∆
ℎ
=
(
𝐻
−
ℎ
)
∆
𝑝
𝑏
,其中
𝑏
=
𝑓
(
𝐻
−
ℎ
)
𝐵
为基线在像片上的
长度(像片基线)。
12. 摄影基线:相邻两个投影中心的连线。
摄影基线与重叠度的关系:
13. 基高比:基线(B)与航高(H)的比值。基高比越大,对立体视觉的判断有影响,显示的
高差显得越大。
14. 高程夸大:常规的测绘影像基高比大于人眼的基高比,导致感受的物体高程被夸大或拉伸。
15. 立体视觉(stereo vision)产生的条件:①有立体像对;②两眼分别看左右影像、互相干扰
少;③两幅像片比例尺接近;④同一像点在两幅影像上的连线与基线近似平行。
16. 核面(Epipolar plane):通过摄影基线
𝑆
1
𝑆
2
与任一物方点
𝐴
所作的平面
𝑊
𝐴
。
17. 核(极)线(Epipolar line):核面与影像面的交线称为核线。
18. 同名(conjugate)核线:同一核面在左右像片上的核线。
19. 同名核线应用:①将数字图像沿核线进行重采样,使其在
𝑦
方向没有视差;②减少找图像
同名点的工作量(变二维相关为一维相关),提高可靠性。
第三章 摄影测量传感器系统
1. 物镜畸变(Lens Distortion)的种类及处理方法:物体畸变分为径向畸变、切向畸变。在摄
影测量中,主要是处理径向畸变,由于量测用相机的焦距是不变的,所以像片所产生的切向畸
变的误差量级可以忽略。对于径向畸变而言,一般可以采用查表的方法或者通过奇次多项式函
数进行改正。
2. 景深:在聚焦完成后,焦点前后的范围内所呈现的清晰图像的距离。
3. 景深与光圈的关系:光圈越小(光圈号数越大),景深越大。
4. 景深在摄影测量中的意义:对于航空摄影测量,物体和相机距离较大,大于超焦点距离,成
像都是清晰的,不用考虑景深问题;对于近景摄影测量,需要考虑。
5. 航空摄影测量为啥要选择中心快门相机,对于动态变形检测或室内 SLAM 工作选择缝隙式
滚动快门是否可以,为什么?
①中心快门相机可以同时曝光整个图像,并且速度较快,适合航空摄影测量在移动平台上拍照
的要求。②不可以选用滚动快门,在物体快速移动时,会造成图像产生变形,会影响立体几何
计算。
6. 假彩色图像:是通过不同波段合成得到的彩色影像,将真彩色图像转变为与实际地貌不一致
的色彩,可以提高图像的可鉴别度。
7. 为了恢复景深反差,摄影时曝光量值应落在感光特性曲线的什么位置?直线区域
第四章 摄影测量中的数学概念
1. 航空摄影的基本要求:①飞行质量要求:航向重叠、旁向重叠、航高差、航向弯曲、旋片角。②
影像质量要求:反差正常(曲线:曝光不足--正确区间--曝光过度细节不足),灰度正常,影像
上地表信息缺失的部分较少。
2. 两平面间的中心投影与从三维空间到二维平面的中心投影的本质不同。
三维到二维是多对一的关系,二维到二维是一对一的关系。
3. 内方位元素(Interior/inner orientation parameters):确定摄像机镜头中心相对于影像位置
关系的参数。主距(
−𝑓
),像主点的坐标(
𝑥
0
,
𝑦
0
)。
4. 外方位元素(exterior orientation parameters):确定影像或摄影光束在摄影瞬间的空间位置
和姿态的参数。摄影中心在物方空间的坐标(
𝑋
𝑆
,
𝑌
𝑆
,
𝑍
𝑆
),三个角元素(
𝜑
,
𝜔
,
𝜅
)。
以
𝑌
轴为主轴的
𝜑−𝜔−𝜅
转角系统:以
𝑌
为主轴旋转
𝜑
角,然后绕
𝑋
轴旋转
𝜔
角,最后绕
𝑍
轴旋
转
𝜅
角。
𝑅
=
𝑅
𝜑
𝑅
𝜔
𝑅
𝜅
=
cos
𝜑
0
−
sin
𝜑
0
1
0
sin
𝜑
0
cos
𝜑
1
0
0
0
cos
𝜔
−
sin
𝜔
0
sin
𝜔
cos
𝜔
cos
𝜅
−
sin
𝜅
0
sin
𝜅
cos
𝜅
0
0
0
1
=
𝑎
1
𝑎
2
𝑎
3
𝑏
1
𝑏
2
𝑏
3
𝑐
1
𝑐
2
𝑐
3
像空间辅助坐标系和像空间坐标系的变换关系:
𝑋
𝑌
𝑍
=
𝑅
𝑥
𝑦
−𝑓
=
𝑎
1
𝑎
2
𝑎
3
𝑏
1
𝑏
2
𝑏
3
𝑐
1
𝑐
2
𝑐
3
𝑥
𝑦
−𝑓
5. 外方位元素与内方位元素的区别与联系:区别为内方位元素确定内部关系,外方位元素确定
相机的空间姿态。联系为先确定内方位元素,后确定外方位元素,两个都有才能恢复摄影时的
状态。
6. 旋转矩阵需要的独立参量:三个:
𝜑
,
𝜔
,
𝜅
。如果参数多余三个,应该在求解时建立参数之
间的约束关系。
7. 共线条件方程(collinearity equations)描述基本关系条件:摄影时像点、物点、投影中心
满足三点共线的关系。
8. 共线方程式经典形式:
𝑥−
𝑥
0
=
−𝑓
𝑎
1
(
𝑋
−
𝑋
𝑆
)
+
𝑏
1
(
𝑌
−
𝑌
𝑆
)
+
𝑐
1
(
𝑍
−
𝑍
𝑆
)
𝑎
3
(
𝑋
−
𝑋
𝑆
)
+
𝑏
3
(
𝑌
−
𝑌
𝑆
)
+
𝑐
3
(
𝑍
−
𝑍
𝑆
)
𝑦−
𝑦
0
=
−𝑓
𝑎
2
(
𝑋
−
𝑋
𝑆
)
+
𝑏
2
(
𝑌
−
𝑌
𝑆
)
+
𝑐
2
(
𝑍
−
𝑍
𝑆
)
𝑎
3
(
𝑋
−
𝑋
𝑆
)
+
𝑏
3
(
𝑌
−
𝑌
𝑆
)
+
𝑐
3
(
𝑍
−
𝑍
𝑆
)
9. 只有一张已知内、外方位元素的像片,根据共线方程,能否确定像片上某一像点对应物点的
物方坐标?如果此时已知物方坐标,能否确定其对应像点的坐标?为什么?
不能,由一个像点缺少 Z 信息,只能得到一条直线,无法得到物方坐标。
可以,从三维到二维的转换是唯一的。
10. 内定向:恢复摄影时像片和投影中心之间的关系,确定相机的内方位元素。(Inner~)
11. 外定向:确定摄影时相机在物方空间的位置和姿态。(exterior orientation)
12. 外定向与内定向的联系与区别:联系为先进行内定向,后进行外定向,两个都完成才能恢
复摄影时的状态。区别为内定向确定相机内部关系,外定向确定相机的空间姿态。
13. 空间后方交会(Space Resection)的定义与目的:利用地面控制点及其在像片上相应的像
点坐标,确定像片外方位元素的方法。
14. 利用共线条件方程式进行后方交会至少需要几个地面控制点:至少需要三个地面控制点(且
不在一条直线上),因为方程有六个未知数。
15. 确定外方位元素的方法:角锥体法,共线条件方程式,雷达,GPS,INS,星象摄影机。
16. 后方交会时,外方位元素初值的确定方法:
①在竖直摄影情况下:
𝑍
0
𝑆
=
𝑚𝑓
,
𝑋
0
𝑆
=
1
𝑛
∑
𝑛
𝑖
=
1
𝑋
𝑡𝑖
,
𝑌
0
𝑆
=
1
𝑛
∑
𝑛
𝑖
=
1
𝑌
𝑡𝑖
,
𝜑
0
=
𝜔
0
=
0
,
𝜅
0
可
(principal point, image nadir point )
20. 朗伯面:,一个完全的漫射体称为朗伯
体。
21. 大气窗口:电磁波透射率高的波段称
为大气窗口。
X0,y0,f 是内方位元素
XL,YL,ZL 是摄站点在物方坐标系中的坐
标
X,Y,Z:是物方点在物方坐标系中的
坐标
a,b,c 是物方空间到像空间的旋转坐标
参数/空间姿态参量方向余弦
x、y:像点在像平面坐标系的坐标
22. 框幅式光学影像成像基
本几何原理?
基本原理:中心投影,物点、
投影中心、像点三点共线
下载后可阅读完整内容,剩余3页未读,立即下载
点击了解资源详情
点击了解资源详情
点击了解资源详情
2022-06-18 上传
2010-05-12 上传
132 浏览量
2021-10-21 上传
2023-06-27 上传
2021-06-23 上传

parsley_sage
- 粉丝: 0
- 资源: 6
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
