STM32F103驱动的MiniAHRS姿态解算详解
本篇文档主要介绍了ardupilot中的ARHS(Attitude and Heading Reference System)姿态结算系统,特别是 MiniAHRS姿态板的讲解。MiniAHRS是一种基于STM32F103单片机的九轴姿态测量模块,集成了MPU6050(包含三轴加速度计和陀螺仪)、HMC5883三轴磁力计以及BMP180高精度气压高度计,所有传感器通过I2C接口与主控制器相连。
姿态解算的核心在于融合加速度计和陀螺仪的数据,以获得设备在三维空间中的姿态信息。加速度计用来测量物体的加速度变化,而陀螺仪则测量物体在空间中的角速度。在这个系统中,当物体受到加速度影响时,加速度计可以提供沿三个轴(X、Y、Z)的加速度分量,而陀螺仪则提供关于旋转的敏感度,帮助确定设备的偏航、俯仰和翻滚角度。
文章首先阐述了基本概念,然后通过一个简单的立方体模型解释了加速度的概念。在真空中(无重力或微重力环境),如果立方体加速,球体会偏离中心并撞击墙壁,此时通过测量墙壁上的压力变化,可以计算出加速度的大小和方向。
姿态解算过程涉及误差补偿和滤波技术,例如Madgwick滤波算法,用于处理加速度计和陀螺仪数据的噪声和漂移,从而得到更准确的姿姿态信息。MiniAHRS的姿态板正是利用这些传感器的数据,结合先进的算法,实时计算并输出设备的俯仰角、偏航角和滚动角,以及相关的地磁航向,这对于无人机导航、机器人控制等应用至关重要。
此外,文档还提到了MiniAHRS硬件的连接方式、传感器的功能和工作原理,以及STM32F103单片机在姿态解算中的作用。整个系统设计简洁高效,充分利用数字器件集成的ADC功能,减少了外部电路的需求,简化了整体架构。
总结来说,本文是针对姿态结算领域的深入解析,重点讲解了如何通过融合加速度计和陀螺仪数据来实现精确的设备姿态跟踪,适合对飞行控制系统、机器人技术或物联网领域有兴趣的读者进一步学习和研究。
1
加速度计
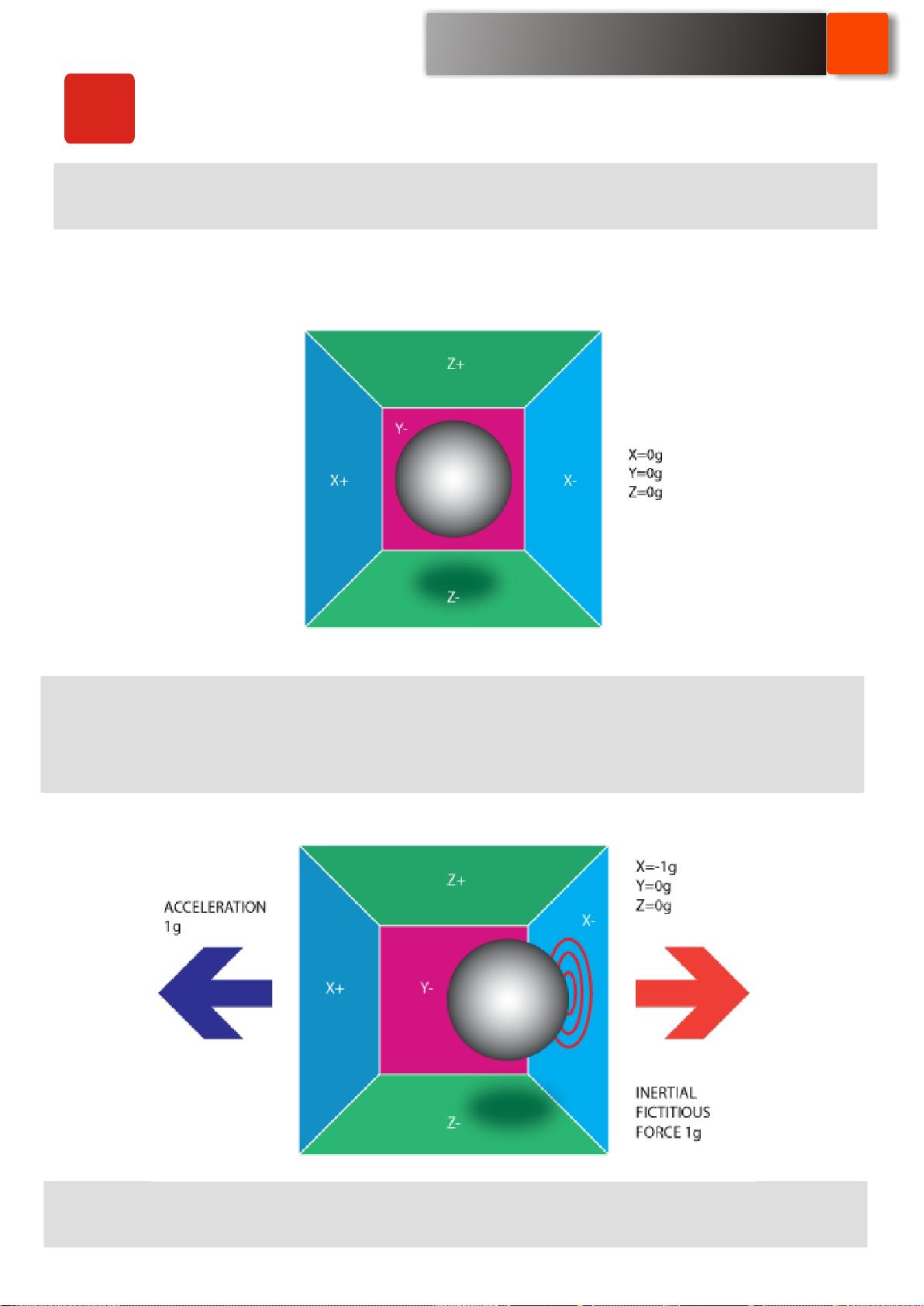
加速度计顾名思义,就是测 量加速度的.那么,我们如何认识这个加速 度呢?在此用一个盒子形
状的立方体来做模型, 认识加速度,如下,盒子内的图像。
如果我们把盒子形状的 立方体 放在一个没引力场的地方,球会保 持在盒子的中间.你可以想
象,这个盒子是在外太 空,远离任何天体,很难找到这样 的地方,就想象飞船轨道围绕地球
飞,一切都是在失重状 态下。那么六个壁面感受到的压力 都是0.
如果我们突然将立方体 向左侧移动(我们加快加速,1G =9 .8米/ S ^ 2),皮球打在了
墙上X-。然后,我们测量 球适用于在X轴上的壁和输出-1g值的压 力。如下图
失重状态
请注意,加速度计反应 的加速向量与当前的受力方向是相 反的.如上图所示,受力方向向
左,但是加速度的向量方向 为右.
7
chiplab7.taobao.com
Powered By 第七实验室
剩余10页未读,继续阅读
2015-06-16 上传
2014-12-05 上传
2024-01-22 上传
2024-01-22 上传
2021-03-10 上传

看海冲浪
- 粉丝: 17
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- MATLAB新功能:Multi-frame ViewRGB制作彩色图阴影
- XKCD Substitutions 3-crx插件:创新的网页文字替换工具
- Python实现8位等离子效果开源项目plasma.py解读
- 维护商店移动应用:基于PhoneGap的移动API应用
- Laravel-Admin的Redis Manager扩展使用教程
- Jekyll代理主题使用指南及文件结构解析
- cPanel中PHP多版本插件的安装与配置指南
- 深入探讨React和Typescript在Alias kopio游戏中的应用
- node.js OSC服务器实现:Gibber消息转换技术解析
- 体验最新升级版的mdbootstrap pro 6.1.0组件库
- 超市盘点过机系统实现与delphi应用
- Boogle: 探索 Python 编程的 Boggle 仿制品
- C++实现的Physics2D简易2D物理模拟
- 傅里叶级数在分数阶微分积分计算中的应用与实现
- Windows Phone与PhoneGap应用隔离存储文件访问方法
- iso8601-interval-recurrence:掌握ISO8601日期范围与重复间隔检查
