响应曲线法与多方法PID整定策略详解
PDF格式 | 515KB |
更新于2024-08-04
| 147 浏览量 | 举报
PID控制器的整定是控制系统设计中的关键环节,本文将探讨多种整定方法,包括基于响应曲线法、连续Ziegler-Nichols方法、频域分析的PD整定、相位裕度整定的PI控制以及非线性整定。这些方法针对不同阶段、变量数量和控制量性质进行划分。
1. **基于响应曲线法的整定**:这是一种常用的方法,适用于一阶滞后对象。首先,通过实验得到阶跃响应曲线,利用系统的动态特性参数(如增益K、时间常数T和滞后时间τ),计算出比例度δ、积分时间IT和微分时间DT。例如,对于PI控制器,比例度δ通常设置为1.1τ,积分时间IT为3.3τ,而对于PID控制器,比例度可能为85%,积分时间和微分时间分别为2τ和5τ。通过实验测量得到的输出特性曲线,可以找到最小和最大输入、输出值,以及上升时间T和滞后时间τ,进而确定控制器参数。
2. **连续Ziegler-Nichols方法**:这是一种经典的方法,通过调整控制器参数以达到特定的衰减率,如4:1或10:1衰减曲线法。这种方法适用于快速确定初始整定值,但可能需要进一步微调以优化性能。
3. **频域分析的PD整定**:这种方法利用系统频率响应特性来调整控制器参数,通常在计算机辅助设计(CAD)软件中进行,如MATLAB。它有助于确保控制器在各种频率下的稳定性和快速响应。
4. **相位裕度整定的PI控制**:此法关注系统的稳定性,通过保证相位裕度来避免振荡。通过调整积分时间IT,保持系统在特定频率处的相位裕度,以实现平稳控制。
5. **非线性整定的PID控制**:针对非线性系统,PID控制器可能需要采用特殊的整定策略,比如通过非线性跟踪-微分器和非线性组合方式生成的控制器,这可能涉及到复杂的模型预测或其他高级控制技术。
PID控制器的整定是一个涉及多个参数和方法的过程,需要根据实际系统的特点选择合适的方法,以实现良好的控制性能和稳定性。实际应用中,可能需要结合以上几种方法进行迭代优化。MATLAB等工具在此过程中扮演了重要角色,提供了数值仿真和优化手段。
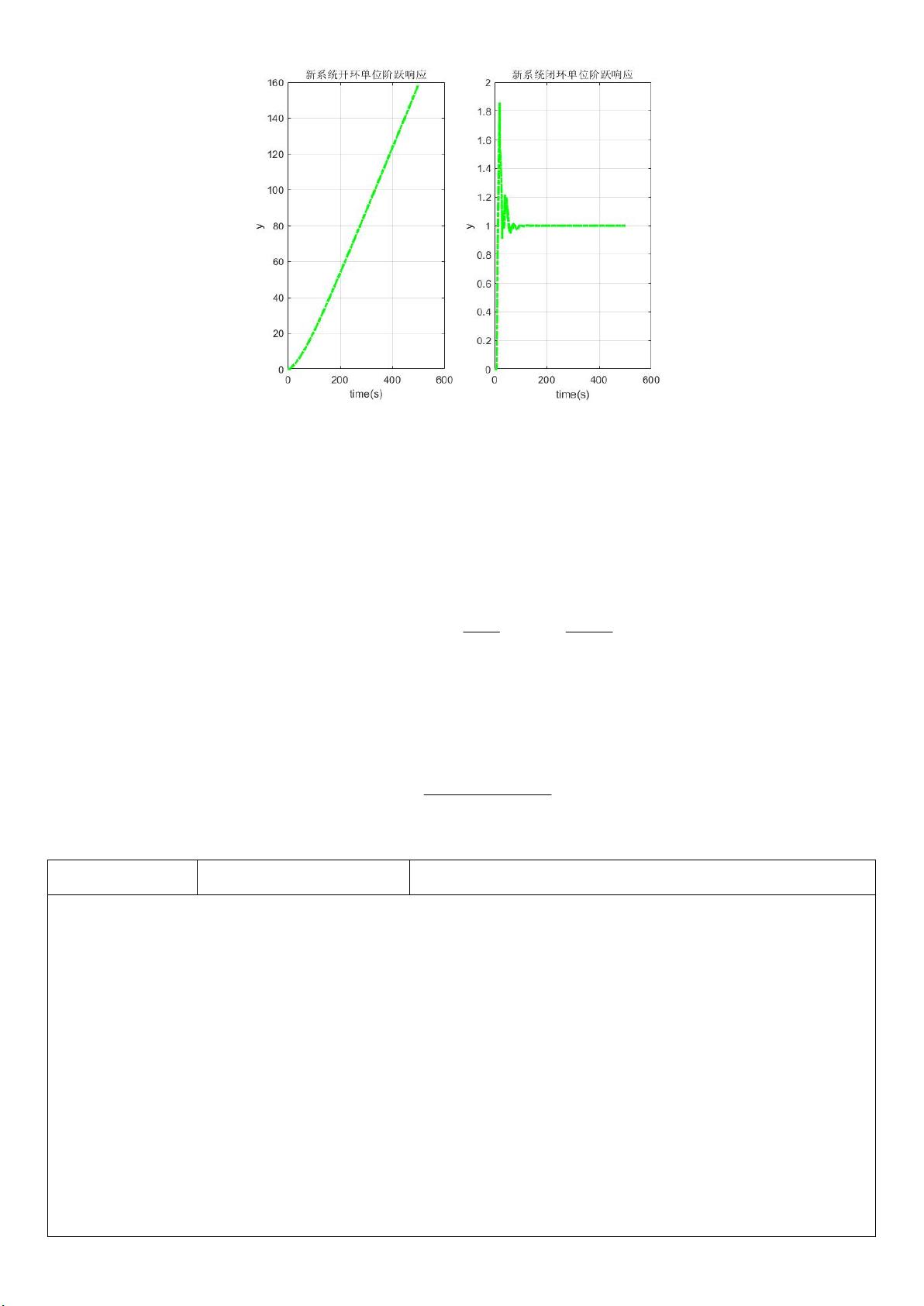
图1-2 新系统开环及闭环单位阶跃响应
1.3 连续
Ziegler-Nichols
方法的整定
Ziegler-Nichols频域整定方法是基于稳定性分析的频域响应PID整定方法。该方法整定的思想是:
对于给定的被控对象传递函数,可以得到其根轨迹,对于穿越
jw
轴的点,增益即为
m
K
,而此点的
w
值即为
m
w
。
整定公式如下所示:
mp
KK 6.0
,
m
p
d
w
K
K
4
,
mp
I
wK
K
上式中,
m
K
为系统开始振荡时的增益K值,
m
w
为振荡频率。
1.3.1 仿真实例
设被控对象为
)20030(
400
)(
2
sss
sG
MATLAB编程如下所示
文件
1
MATLAB.m
串联
PID
校正
+
串联超前滞后校正
%% 系统建模
clear all;close all;clc
num=[400];
den=[1 30 200 0];
sys=tf(num,den);
H=1;
sign=-1;
%% 绘制初始系统的单位阶跃响应
figure(1);
subplot(1,2,1);
t=0:0.01:10;
c=step(sys,t);
plot(t,c,'g-.','linewidth',2);grid on;
xlabel('time(s)');ylabel('y');title('旧系统开环单位阶跃响应');
subplot(1,2,2);
剩余11页未读,继续阅读
相关推荐




不知何时归家
- 粉丝: 191
 我的内容管理
展开
我的内容管理
展开







最新资源
- Ruby语言集成Mandrill API的gem开发
- 开源嵌入式qt软键盘SYSZUXpinyin可移植源代码
- Kinect2.0实现高清面部特征精确对齐技术
- React与GitHub Jobs API整合的就业搜索应用
- MATLAB傅里叶变换函数应用实例分析
- 探索鼠标悬停特效的实现与应用
- 工行捷德U盾64位驱动程序安装指南
- Apache与Tomcat整合集群配置教程
- 成为JavaScript英雄:掌握be-the-hero-master技巧
- 深入实践Java编程珠玑:第13章源代码解析
- Proficy Maintenance Gateway软件:实时维护策略助力业务变革
- HTML5图片上传与编辑控件的实现
- RTDS环境下电网STATCOM模型的应用与分析
- 掌握Matlab下偏微分方程的有限元方法解析
- Aop原理与示例程序解读
- projete大语言项目登陆页面设计与实现
