ROS导航栈优化指南:DWA与AMCL参数配置
"ROS导航参数配置指南 - DWA与AMCL"
ROSNavigationTuningGuide是由Kaiyu Zheng在2016年9月2日撰写的一篇详细教程,旨在帮助用户优化ROS导航堆栈的性能。ROS导航堆栈是用于移动机器人自主定位和路径规划的核心工具,它处理来自里程计、传感器和环境地图的数据,生成安全的机器人执行路径。然而,要最大化其性能,需要对一系列参数进行微调,这是一个复杂的过程。
1. 速度与加速度:
在导航系统中,机器人的速度和加速度参数至关重要。这些参数决定了机器人的动态行为,包括移动速度的上限和变化速率,以及机器人在避开障碍时的灵活性。合理的速度和加速度设置可以确保机器人既能在复杂环境中快速反应,又能保持稳定运动。
2. 全局规划器(Global Planner):
(a) 全局规划器选择:ROS中提供了多种全局规划器,如A*、Dijkstra等,选择合适的规划器取决于场景的复杂性和计算资源。全局规划器负责从起点到目标点生成一条初始路径,通常忽略局部障碍。
(b) 全局规划器参数:每个全局规划器有自己的参数集,如路径成本函数权重、障碍物距离阈值等,这些参数需要根据实际环境调整,以达到最佳路径规划效果。
3. 局部规划器(Local Planner):
(a) 局部规划器选择:局部规划器负责实时修正全局规划器生成的路径,以避免突然出现的障碍。常见的局部规划器有DWA(Dynamic Window Approach)等。
(b) DWALocal Planner:
i. DWA算法:DWA是一种基于动态窗口的局部路径规划方法,通过计算机器人在不同速度和方向下的碰撞可能性,来决定最优的速度向量。
ii. DWA前向模拟:DWA会预测机器人在未来一段时间内的运动轨迹,评估可能的碰撞风险。
iii. DWA轨迹评分:DWA通过一个评分系统对潜在的运动轨迹进行评估,考虑速度、加速度、障碍物接近度等因素。
iv. DWA参数:包括目标接近速度、最小/最大速度、最小/最大旋转速率等,这些参数影响着机器人在动态环境中的行为。
这篇指南深入浅出地介绍了如何调整ROS导航堆栈中的DWA和AMCL(Adaptive Monte Carlo Localization)等关键组件的参数,为优化导航性能提供了宝贵的指导。AMCL是一种概率定位算法,它使用粒子滤波技术来估计机器人在地图中的位置,对于在未知或动态环境中的导航尤其重要。通过理解并微调这些参数,用户能够使他们的机器人在各种环境中更加灵活、高效地移动。
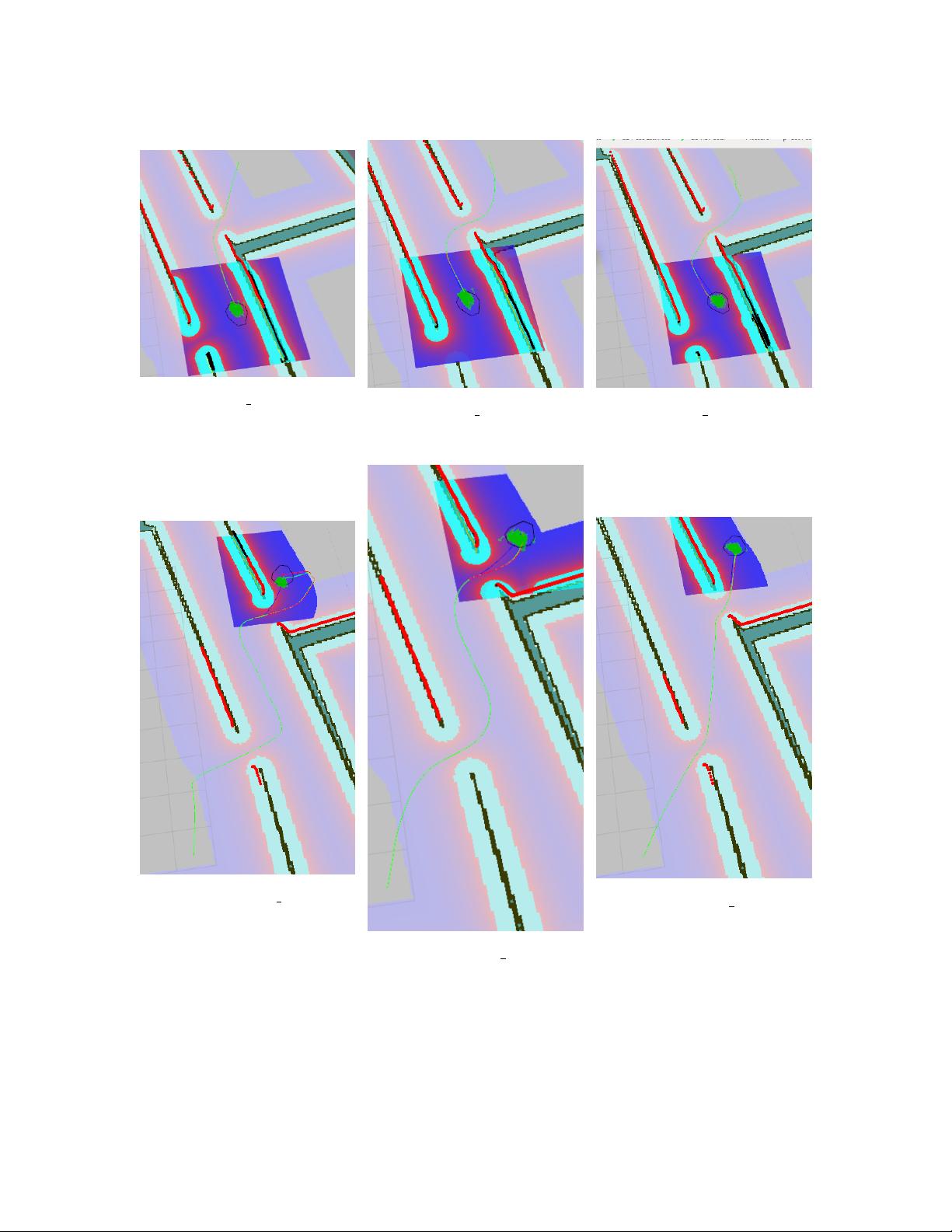
Figure 5: cost factor = 0.01
Figure 6: cost factor = 0.55
Figure 7: cost factor = 3.55
Figure 8: neutral cost = 1
Figure 9: neutral cost = 66
Figure 10: neutral cost = 233
5
剩余22页未读,继续阅读
217 浏览量
2022-05-17 上传
2021-03-24 上传
2022-09-23 上传
2017-07-23 上传
2020-09-29 上传
2021-05-14 上传
2018-04-15 上传
2018-05-27 上传

weixin_43843937
- 粉丝: 0
- 资源: 1
 我的内容管理
展开
我的内容管理
展开







