新型并联机床最优轨迹规划与遗传算法
需积分: 5 11 浏览量
更新于2024-08-12
收藏 194KB PDF 举报
"一种新型并联机床的最优轨迹规划 (2003年),由范守文、徐礼钜和甘泉共同发表于2003年2月的《电子科技大学学报》。该研究提出了一种创新的轨迹规划方法,应用于新型并联机床,旨在优化加工过程中的运动路径和性能。"
并联机床是一种具有多个独立驱动的执行机构的复杂机械系统,通常具有高精度、高速度和高刚性的特点。在这一研究中,作者们关注的是如何有效利用并联机床的多余自由度,以实现更高效、更稳定的加工过程。他们提出的最优轨迹规划方法分为两个主要步骤:
首先,规划发生在参数空间。在这种空间中,机器人的运动可以被抽象为一组参数,这些参数可以更直观地反映工件的形状和运动需求。通过这种方式,研究人员能够更好地理解和控制机床的运动轨迹。
其次,参数空间的轨迹被映射到关节空间。这个过程涉及到将参数化的运动转换为各个关节的实际运动指令,确保每个关节能够协调工作,实现所需的轨迹。
为了优化并联机床的多余自由度,研究者采用了遗传算法。遗传算法是一种基于生物进化原理的全局优化技术,能够搜索大量的解决方案空间,寻找最佳解。在本研究中,雅可比矩阵的条件数的倒数被用作适应度函数。雅可比矩阵反映了系统动态特性和稳定性,其条件数反映了矩阵的条件好坏,即数值稳定性。选择其倒数作为适应度函数,目的是最小化运动过程中的不稳定性和误差,从而实现更平滑的运动性能。
通过仿真计算,研究结果证明了这种方法的有效性。最优轨迹规划不仅能够设计出适合加工任务的灵活构型,还能够保证并联机床在整个加工过程中具有良好的动态性能和稳定性。这种优化方法对于提高并联机床的工作效率和加工精度具有重要意义,为并联机床的轨迹规划提供了新的思路和工具。
关键词涉及并联机床、轨迹规划、遗传算法和多余自由度,表明该研究集中在解决这些问题上,为并联机床的控制和优化提供了理论支持和技术方案。这项工作对于提升我国在精密制造领域的技术水平和创新能力具有积极的推动作用。
第 32 卷 第 1 期 电 子 科 技 大 学 学 报 Vol.32
No.1
2003 年 2 月 Journal of UEST of China Feb.
2003
一种新型并联机床的最优轨迹规划
范守文
*1
徐礼钜
2
甘 泉
1
(1. 电子科技大学机械电子工程学院 成都 610054; 2. 四川大学制造科学与工程学院 成都 610065)
【摘要】提出了一种新型并联机床的最优轨迹规划方法,其过程是在参数空间进行轨迹规划,再将参
数空间的运动轨迹映射到关节空间。在轨迹规划中,以雅可比矩阵条件数的倒数作为适应度函数,利用遗
传算法优化了并联机床的多余自由度。仿真计算结果表明:最优轨迹规划方法既能给出并联机床加工过程
中的灵巧构型,又可使得并联机床获得平稳的运动性能。
关 键 词 并联机床; 轨迹规划; 遗传算法; 多余自由度
中图分类号 TP242 文献标识码 A
Optimal Trajectroy Planning for New Type Parallel Machine Tool
Fan Shouwen
1
Xu Liju
2
Gan Quan
1
(1.School of Electromechanical Eng.,UEST of China Chengdu 610054; 2.School of Manufacturing Sci.&Eng.,Sichuan University Chengdu
610065)
Abstract A new trajectory planning method for a new type parallel machine tool is
proposed in this paper. This method plans trajectory in parameter space first, then the trajectory is
mapped into joint space. The redundant degree of freedom of parallel machine tool is optimized
with genetic algorithm, and the reciprocal of condition number of jacobian matrix is chosen as
adapation degree function. Results of simulation and calculation show that this method can gain
not only dexterious configuration but also steady kinematic characteristic.
Key words parallel machine tool; trajectory planning; genetic algorithm; redunant
degree of freedom
并联机床(Parallel Machine Tool)又称为虚拟轴机床(Virtual Axis
Machine Tool),是90年代中期问世的数控机床新结构,是机器人技术与
机床结构技术结合的产物,其原型是并联机器人操作机。并联机床与传
统五坐标数控机床相比具有以下优点:
1) 刚度重量比大;
2) 响应速度快;
3) 加工精度高;
4) 环境适应能力强;
2001年12月18日收稿
* 男 33岁 博士 副教授 主要从事工业机器人及设计自动化方面的研究
Y
2
Z
1
Y
1
A
1
A
2
A
3
B
1
B
2
B
3
O
O
1
l
1
l
2
l
3
l
4
X
Y
Z
X
1
X
2
Z
2
h
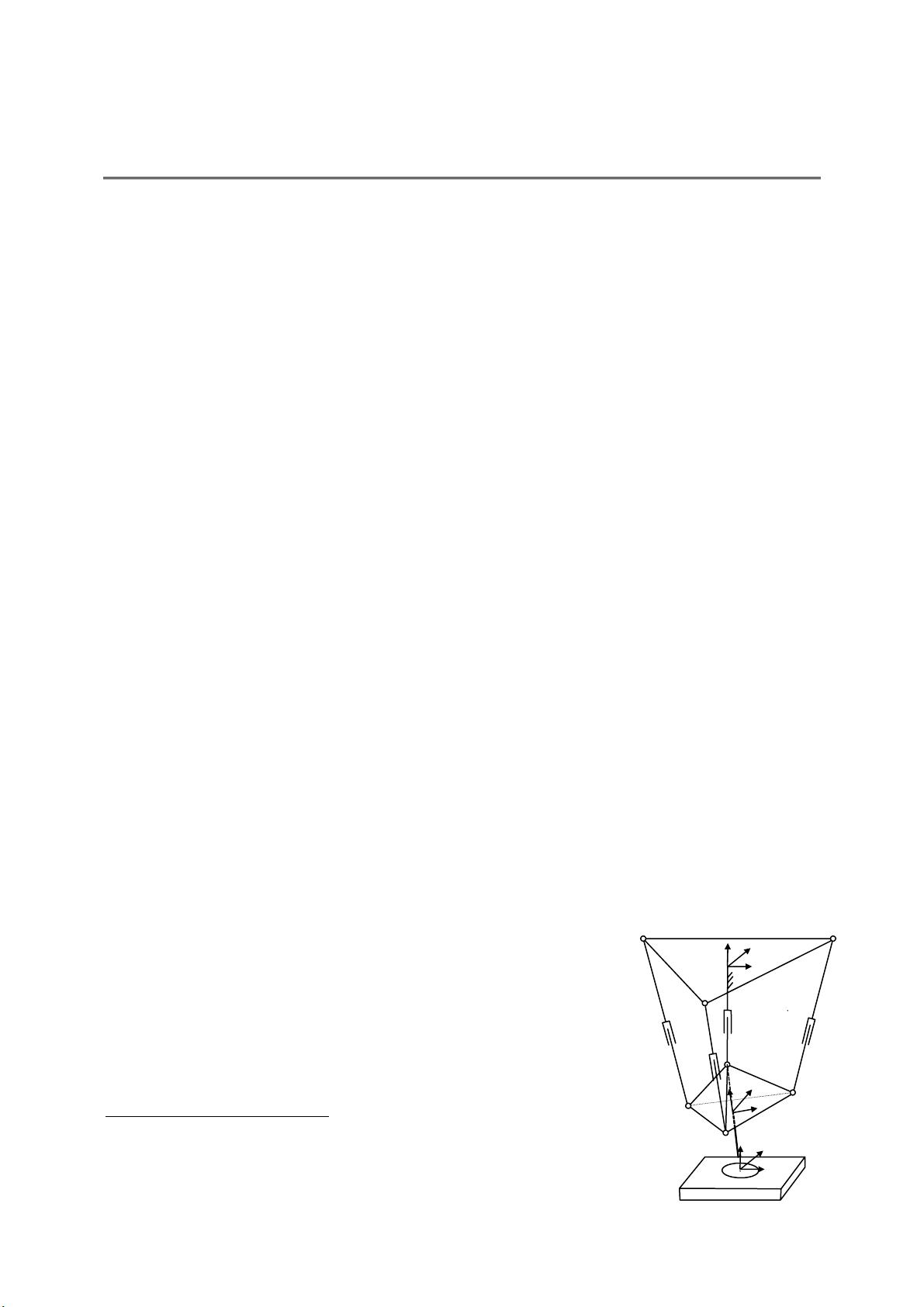
图1 新型并联机床布局方案图
下载后可阅读完整内容,剩余5页未读,立即下载
点击了解资源详情
2021-05-30 上传
点击了解资源详情
2021-06-11 上传
2021-01-30 上传
2021-04-16 上传
2021-08-12 上传
2021-08-14 上传
2020-05-05 上传

weixin_38682076
- 粉丝: 6
- 资源: 917
 我的内容管理
展开
我的内容管理
展开







最新资源
- 掌握Jive for Android SDK:示例应用的使用指南
- Python中的贝叶斯建模与概率编程指南
- 自动化NBA球员统计分析与电子邮件报告工具
- 下载安卓购物经理带源代码完整项目
- 图片压缩包中的内容解密
- C++基础教程视频-数据类型与运算符详解
- 探索Java中的曼德布罗图形绘制
- VTK9.3.0 64位SDK包发布,图像处理开发利器
- 自导向运载平台的行业设计方案解读
- 自定义 Datadog 代理检查:Python 实现与应用
- 基于Python实现的商品推荐系统源码与项目说明
- PMing繁体版字体下载,设计师必备素材
- 软件工程餐厅项目存储库:Java语言实践
- 康佳LED55R6000U电视机固件升级指南
- Sublime Text状态栏插件:ShowOpenFiles功能详解
- 一站式部署thinksns社交系统,小白轻松上手
