Apollo自动驾驶笔记:NodeBook精华
需积分: 5 110 浏览量
更新于2024-06-19
收藏 7.16MB PDF 举报
"Apollo NodeBook是关于Apollo自动驾驶框架的笔记,主要涵盖了Apollo系统中与控制命令相关的部分,包括车辆的加速、制动、转向等关键控制参数的设置和管理。"
Apollo是一个开源的自动驾驶软件平台,由百度公司开发,旨在提供一个可扩展的框架,允许开发者和研究者针对不同的自动驾驶场景进行研发。在Apollo中,节点(Node)是系统的基本构建块,它们负责处理特定的任务,如感知、定位、规划和控制。
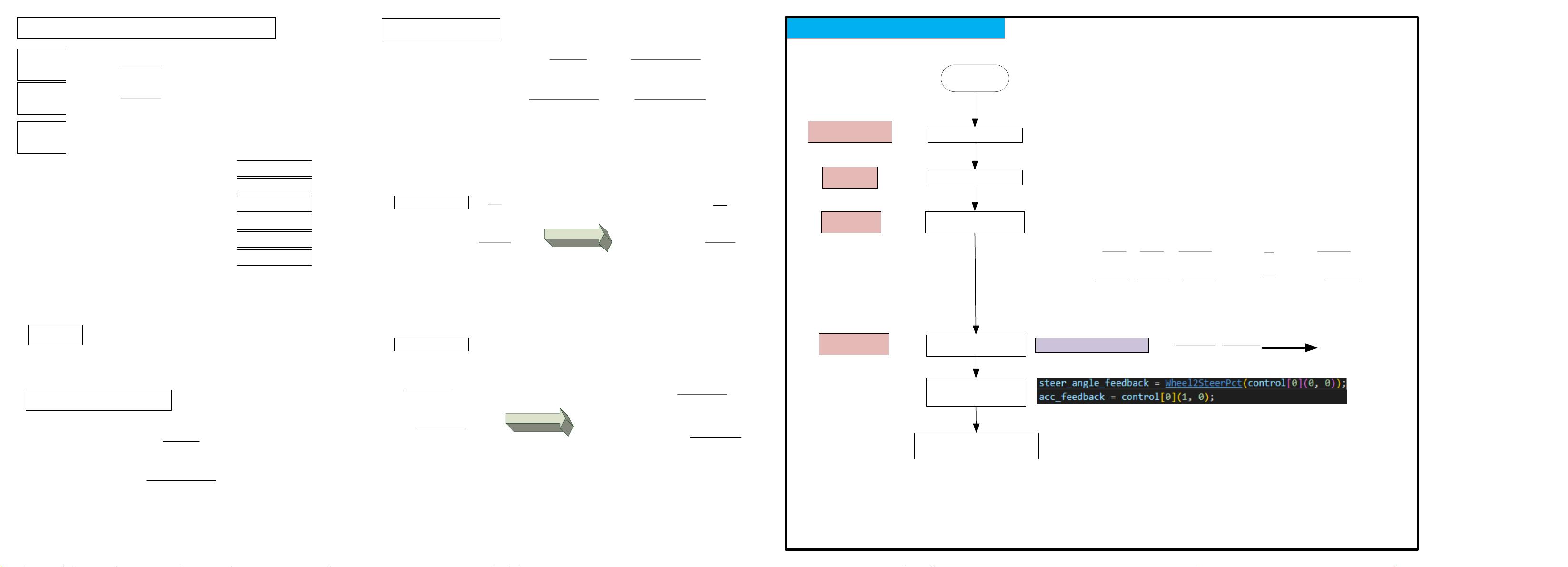
描述中提到的`messageControlCommand`是一个关键的控制消息结构,用于发送到车辆控制系统,以调整车辆的动态行为。以下是对`messageControlCommand`各字段的详细解释:
1. `Header`: 包含消息的元数据,如时间戳和发送者信息,确保信息的正确路由和同步。
2. `throttle`: 目标油门百分比,范围在0到100之间,用于控制车辆的加速。
3. `brake`: 目标刹车百分比,同样在0到100之间,用于车辆减速或停车。
4. `steering_rate`: 非定向转向速率,以满量程每秒的百分比表示,决定了车辆转向的速度。
5. `steering_target`: 转向目标,以满量程百分比表示,负值代表左转,正值代表右转,用于设定车辆的转向角度。
6. `parking_brake`: 停车制动开关,布尔值,true表示启用,false表示禁用。
7. `speed`: 目标速度,以米/秒为单位,定义了车辆应行驶的速度。
8. `acceleration`: 目标加速度,以米/平方秒为单位,指示车辆应当如何改变其速度。
9. `reset_model`: 模型重置标志,已弃用,可能用于在仿真环境中重新初始化车辆状态。
10. `engine_on_off`: 发动机启停状态,布尔值,true表示发动机开启,false表示关闭。
11. `trajectory_fraction`: 上一周期规划轨迹的完成百分比,用于评估路径执行的进度。
12. `driving_mode`: 驾驶模式,已弃用,可能包括自动、手动等不同驾驶状态。
13. `gear_location`: 变速器位置,例如前进、倒退、空挡等。
14. `debug`: 诊断信息,可能包含调试日志和其他系统状态细节。
这些字段提供了对车辆动态行为的精细控制,是实现自动驾驶系统核心功能的关键组件。在Apollo系统中,这些控制命令通常由高精度的定位、感知和路径规划模块生成,然后传递给车辆的执行机构,实现自动化驾驶。通过深入理解和灵活运用这些控制参数,开发者可以精确地调整车辆行为,以适应各种复杂的道路环境和驾驶场景。
TrajectoryAnalyzer::Tr
ajectoryTransformToCOM
遍历每个路径上的每个点
开始
将每个点的位置即x,y由相对车身后
轴中心,移至相对车辆的质心的位置
0
sinl
cosl
refr
refr
ref
ref
ref
z
y
x
ref
refrefr
refrefr
refref
refref
refref
ref
ref
ref
z
y
x
zz
yy
xx
z
y
x
0
sinl
cosl
TrajectoryAnalyzer::
ComputeCOMPosition
X
Y
VehicleStateProvider
::ComputeCOMPosition
state_transform_to_com_reverse= false
state_transform_to_com_drive= true
ego
ego
ego
rego
z
y
x
lRspo
13
13
33
0
0
根据自车的方向(四元数)->旋转矩阵为R
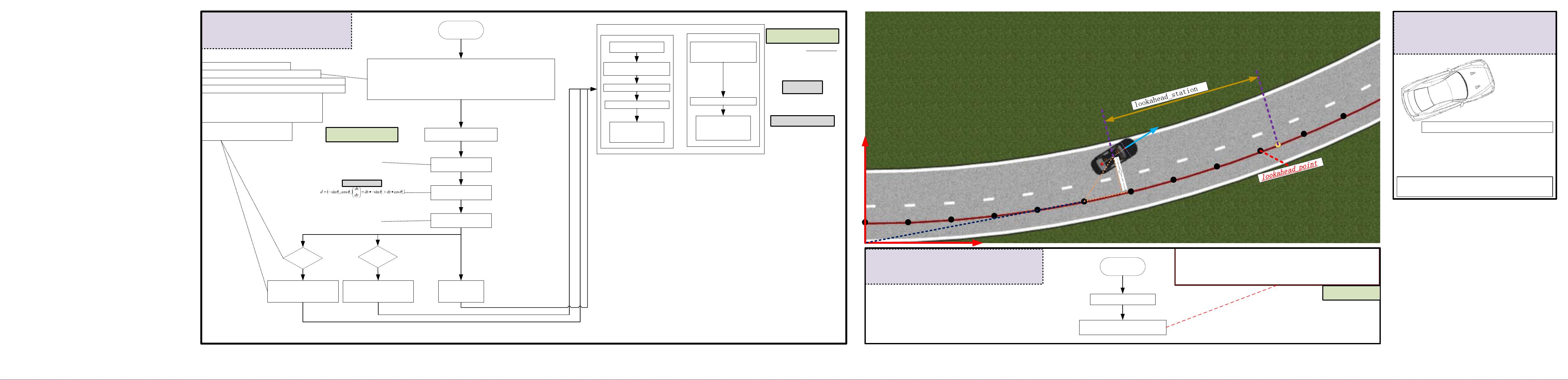
LatController::Com
puteLateralErrors
开始
计算target_point目标点
1、根据query_time_nearest_point_only来判断是否采用最近点
2、根据use_navigation_mode
&&!enable_navigation_mode_position_update来判断是否以时间
来计算预瞄距离
use_navigation_mode=false
query_time_nearest_point_only=false
enable_navigation_mode_position_update=true
按距离查找最近点
TrajectoryAnalyzer::Query
NearestPointByPosition
计算当前位置与最
近点的偏差
nearego
yyy
nearego
xxx
计算法向偏差
enable_navigation_mode_error_filter =false
计算航向角偏差
nearego
switch_speed: 3.0
switch_speed_window: 1.0
判断线速度
是否>3 m/s
判断线速度
是否<2 m/s
lookahead_station: 1.4224
lookback_station: 2.8448
lookahead_station_high_speed: 1.4224
lookback_station_high_speed: 2.8448
高速:向前/向后
lookahead_station = 1.4224
lookback_station = 2.8448
高
速
低
速
低速:向前/向后
lookahead_station = 1.4224
lookback_station = 2.8448
否者进行插值
trajectory_analyzer.QueryN
earestPointByRelativeTime
cos
_
int_
ego
stationlook
refpolook
v
x
tt
ego
V
heading_error
_feedback
int_ poprenearpre
lateral_error_feedback
_feedback
lateral_error
sin:
sin:
_
_
stationlookpre
stationlookpre
xddR
xddD
档
档
计算预瞄点相关误差
D档
计算预瞄点的相对时间
找到小于等于预瞄点的相对
时间的参考轨迹的参考点
计算预瞄的参考点航向误差
R档
航向误差
heading_error_feedback
= heading_error即无预瞄
计算预瞄的参考点横向误差
计算预瞄的参考点横向误差
计算侧向速度误差
计算侧向加速度误差
等
计算侧向速度误差(加
负符号)
计算侧向加速度误差
等
剩余38页未读,继续阅读
2024-12-30 上传
2024-12-30 上传
2024-12-30 上传
2024-12-30 上传
2024-12-30 上传










