OpenCV实现的车牌定位算法优化与实战
OpenCV下车牌定位算法实现是一种在计算机视觉领域广泛应用的技术,它在车牌识别系统中扮演着关键角色,因为准确的车牌定位直接影响到整个识别过程的效率和准确性。本文档介绍了一种基于OpenCV的车牌定位方法,主要通过C++编程实现,并对C:\ProgramFiles\OpenCV\samples\c.squares.c样例程序进行了修改以适应车牌定位的需求。
该算法首先通过Canny边缘检测技术找出图像中的边缘,这是为了减少背景噪音并突出车牌可能存在的边界线。然后,通过二值化处理进一步简化图像,以便更容易地识别和区分前景和背景。接下来,cvFindContours函数被用来搜索轮廓,这是寻找潜在车牌区域的关键步骤。算法会根据找到的轮廓特点,如角点数量、角的度数以及轮廓的大小,来确定矩形的精确位置。
然而,该算法在实际应用中存在局限性。例如,在复杂的背景噪声或车牌颜色与背景相似度较高的情况下,简单的矩形定位可能难以有效工作。因此,文档提到需要寻找更高级别的定位策略,这可能包括使用模板匹配、特征点匹配或深度学习的方法来提高定位精度。
在提供的代码片段中,可以看到一些辅助函数,如计算两个向量之间的夹角,这对于判断轮廓是否构成矩形具有重要作用。此外,变量"thresh"设置了一个阈值,用于控制边缘检测的敏感度,这可以根据实际情况进行调整以优化定位结果。
总结来说,OpenCV下的车牌定位算法是通过一系列图像处理和分析技术来实现的,它在基础的形状检测基础上,结合了边缘检测、轮廓分析和角点计算等技术。尽管如此,为了应对实际场景中的复杂性和变化性,研究人员和开发者不断探索和改进算法,以便提供更稳定和准确的车牌定位功能。在实际开发中,可能还需要结合其他高级技术来提升性能和鲁棒性。
OpenCV 下车牌定位算法实现代码(一)
车牌定位算法在车牌识别技术中占有很重要地位,一个车牌识别系统的识别率往往取
决于车牌定位的成功率及准确度。
车牌定位有很多种算法,从最简单的来,车牌在图像中一般被认为是长方形,由于图
像摄取角度不同也可能是四边形。我们可以使用 中的实例:
这是一个搜索图片中矩形的一个算法。我们只要稍微修改一下
就可以实现定位车牌。
在这个实例中使用了 算法进行边缘检测,然后二值化,接着用 搜索
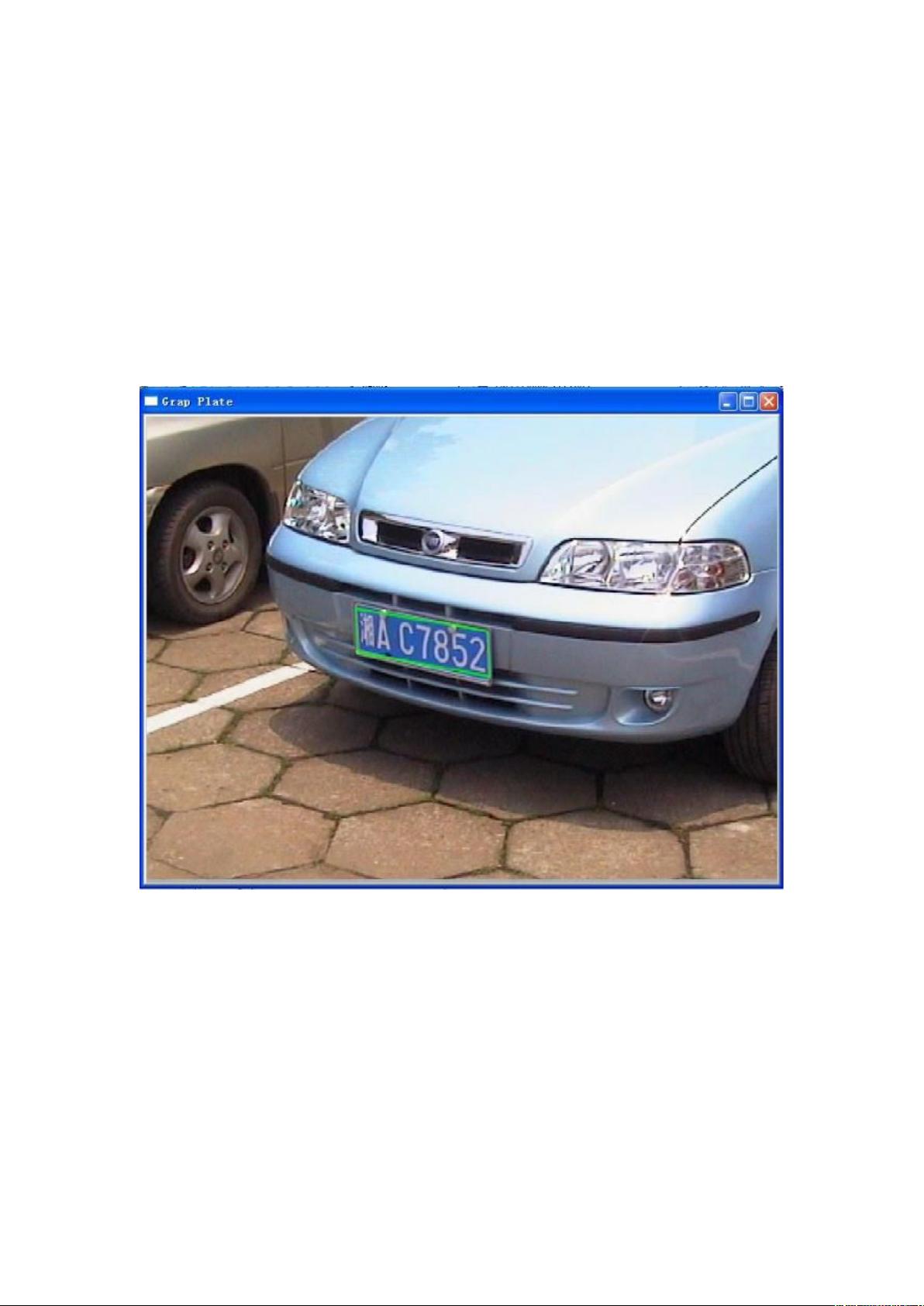
轮廓,最后从找到的轮廓中根据角点的个数,角的度数和轮廓大小确定,矩形位置。以下
是效果图:
这个算法可以找到一些车牌位置,但在复杂噪声背景下,或者车牌图像灰度与背景相差
不大就很难定位车牌。所以我们需要寻找更好的定位算法。下面是 的代码:
!"
#
$%$
$%%%$
下载后可阅读完整内容,剩余7页未读,立即下载
2020-09-18 上传
2017-11-23 上传
2023-05-19 上传
201 浏览量
542 浏览量
2021-09-30 上传
283 浏览量
2024-05-03 上传

u010964172
- 粉丝: 0
- 资源: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android圆角进度条控件的设计与应用
- mui框架实现带侧边栏的响应式布局
- Android仿知乎横线直线进度条实现教程
- SSM选课系统实现:Spring+SpringMVC+MyBatis源码剖析
- 使用JavaScript开发的流星待办事项应用
- Google Code Jam 2015竞赛回顾与Java编程实践
- Angular 2与NW.js集成:通过Webpack和Gulp构建环境详解
- OneDayTripPlanner:数字化城市旅游活动规划助手
- TinySTM 轻量级原子操作库的详细介绍与安装指南
- 模拟PHP序列化:JavaScript实现序列化与反序列化技术
- ***进销存系统全面功能介绍与开发指南
- 掌握Clojure命名空间的正确重新加载技巧
- 免费获取VMD模态分解Matlab源代码与案例数据
- BuglyEasyToUnity最新更新优化:简化Unity开发者接入流程
- Android学生俱乐部项目任务2解析与实践
- 掌握Elixir语言构建高效分布式网络爬虫
