嫦娥三号月球软着陆轨道设计与控制策略研究
需积分: 0 37 浏览量
更新于2024-06-30
收藏 1.06MB PDF 举报
本文主要探讨了嫦娥三号探测器在月球表面实现软着陆的关键技术与策略。嫦娥三号是中国空间探索项目中的重要一步,其软着陆对于验证月球探测技术、获取科学数据以及未来深空探索任务的成功至关重要。作者们利用微分动力学方程和最优控制理论,对探测器的轨道设计和各个阶段的控制决策进行了深入研究。
首先,他们基于嫦娥三号接近月球的近月点和远月点的高度信息,运用角动量守恒和机械能守恒定律,精确计算出在这些位置的相对速度及其方向。这个步骤涉及物理学的基本原理,确保了探测器在转移轨道上的准确性和安全性。
然而,着陆过程中的不确定性使得轨道设计更具挑战性。文章指出,由于着陆点的具体路径未知,设计者必须依赖有限的信息来规划软着陆策略。他们可能采用了数值模拟和仿真技术,通过优化算法来找到最佳的轨道路径和控制参数,以减小着陆风险,确保平稳着陆。
在整个过程中,作者强调了遵守学术诚信的重要性,明确指出在比赛期间禁止与外界交流赛题相关的内容,防止抄袭和不公平竞争。参赛团队郑重承诺,严格遵循全国大学生数学建模竞赛的章程和规则,以维护竞赛的公正性。
本文的研究成果不仅对于嫦娥三号的实际着陆操作有直接指导意义,也展示了参赛者在解决实际工程问题时所运用的数学模型和控制理论知识,提升了他们的实践能力和创新思维。此外,这篇论文还可能为未来的太空探索任务提供宝贵的理论支持和技术积累,推动我国航天科技的发展。
4
4 符号说明
符号
含义
A
v
嫦娥三号在近月点的瞬时速度
B
v
嫦娥三号在远月点的瞬时速度
m
单位时间燃料消耗的公斤数
F
主减速发动机的推力
e
v
主减速发动机的比冲
m
g
月球引力加速度
ω
嫦娥三号绕月运动的角速度
ij
I
坐标为
( , )ij
的像素的高程值
ij
p
坐标为
( , )ij
的像素的坡度值
k
W
第
k
个单元格的坡度大小
5 模型的建立与求解
5.1 问题一
5.1.1 近月点和远月点处速度的确定
嫦娥三号的落月过程主要分为以下几个阶段:嫦娥三号在接近月球后进行减速,
被月球引力捕获后进入距月面 100km 高度的环月圆轨道中;接着在环月圆轨道上运行
数天后,再次减速,进入 100km
15km 的椭圆轨道中;然后于 15km 高度的近月点制
动,沿类抛物线的轨迹向月面进行软着陆。软着陆过程包括着陆准备轨道、主减速
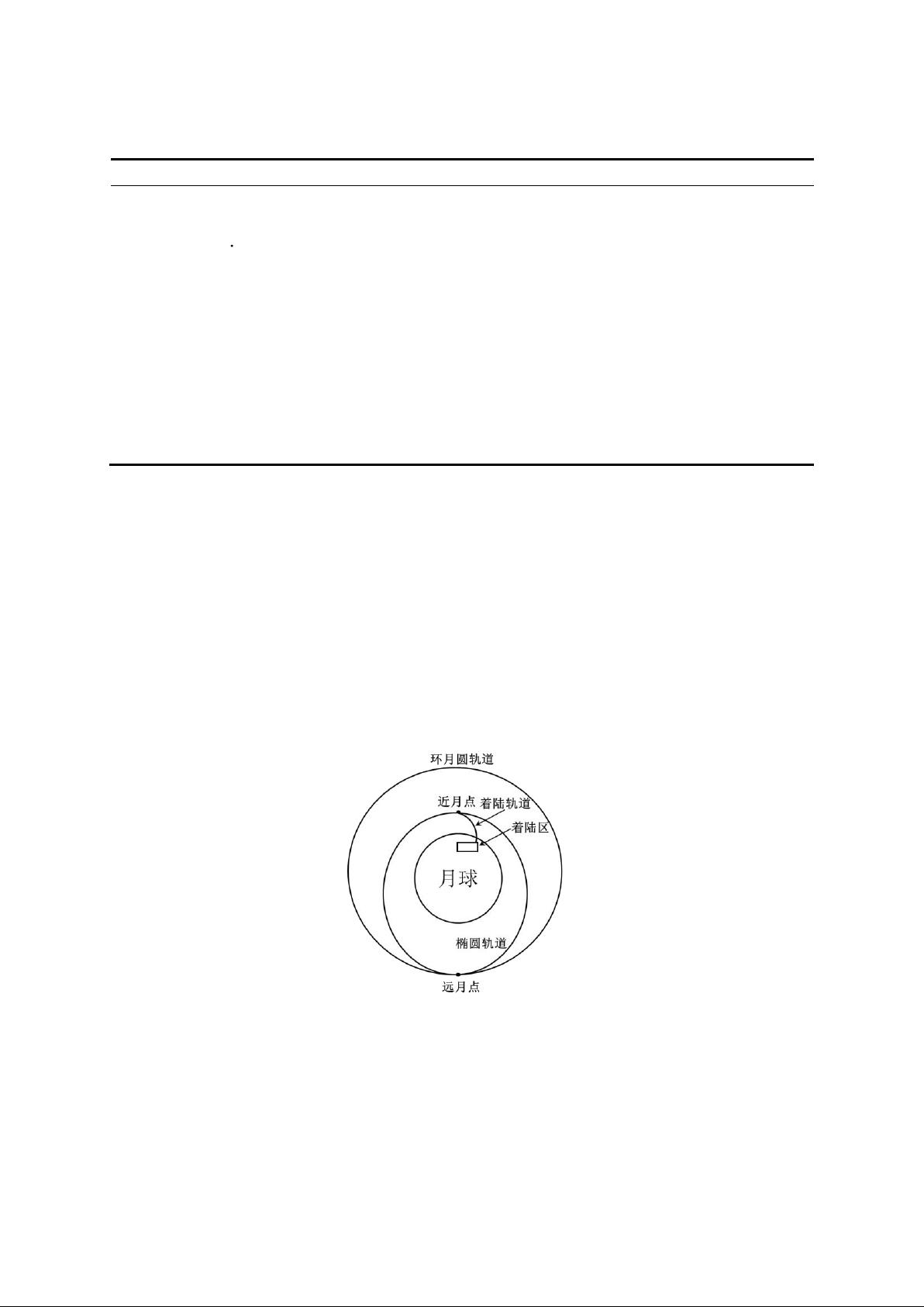
段、快速调整段、粗避障段、精避障段和缓速下降 6 个过程。落月过程如图所示:
图 1 落月过程示意图
嫦娥三号在椭圆轨道上运动时,由于其自身尺寸远小于其与月球之间的距离,故
此时可将嫦娥三号视为一个质点。同时,由于月球近似为一个球形,就引力效果而
言,可将月球看作一个质量集中在月心的质点。由此可将问题简化,便于后面讨论。
当嫦娥三号在沿着近月点高度 15 公里、远月点高度 100 公里的椭圆轨道绕月运动
时,可以将其看成一个绕月球公转的行星,假设嫦娥三号沿如图轨道逆时针运行,近
月点远月点如图所示:
剩余27页未读,继续阅读
2022-08-03 上传
2021-09-17 上传
2019-11-01 上传
2012-10-10 上传
2021-02-23 上传
294 浏览量
2014-05-29 上传
741 浏览量

xhmoon
- 粉丝: 20
- 资源: 328
 我的内容管理
展开
我的内容管理
展开







最新资源
- 俄罗斯RTSD数据集实现交通标志实时检测
- 易语言开发的文件批量改名工具使用Ex_Dui美化界面
- 爱心援助动态网页教程:前端开发实战指南
- 复旦微电子数字电路课件4章同步时序电路详解
- Dylan Manley的编程投资组合登录页面设计介绍
- Python实现H3K4me3与H3K27ac表观遗传标记域长度分析
- 易语言开源播放器项目:简易界面与强大的音频支持
- 介绍rxtx2.2全系统环境下的Java版本使用
- ZStack-CC2530 半开源协议栈使用与安装指南
- 易语言实现的八斗平台与淘宝评论采集软件开发
- Christiano响应式网站项目设计与技术特点
- QT图形框架中QGraphicRectItem的插入与缩放技术
- 组合逻辑电路深入解析与习题教程
- Vue+ECharts实现中国地图3D展示与交互功能
- MiSTer_MAME_SCRIPTS:自动下载MAME与HBMAME脚本指南
- 前端技术精髓:构建响应式盆栽展示网站
