舵机在机器人中的应用与控制系统设计
版权申诉
138 浏览量
更新于2024-06-23
收藏 5.33MB DOC 举报
本文档主要探讨了机器人中舵机的应用原理,尤其是在现代机器人技术发展中的重要角色。机器人,作为集高技术和机电一体化于一体的产物,自上世纪中叶以来在全球范围内得到了广泛应用,尤其在工业、国防、医疗康复等领域展现出了显著优势。进入21世纪,随着科技的进步,机器人不仅局限于生产线,而是深入到生活的各个方面,成为社会发展的重要推动力。
舵机作为机器人驱动装置的一种创新,是为适应更高精度和控制要求而出现的。毕业设计通过实验研究和单片机控制,深入剖析了舵机的工作原理。舵机电路的设计与单片机编程相结合,实现了对舵机的精准操控,其核心在于闭环控制方式的提出和实现。闭环控制系统通过实时反馈机制,确保机器人动作的精确性和稳定性。
1.1 机器人定义与应用环境
机器人被定义为具备自主动力和控制能力的设备,既能接受人类指令,也能按预设程序运行,甚至具备人工智能决策。它们的任务是协助或替代人类完成重复性、危险或精细的工作,如制造业、建筑领域等。随着技术进步,人们对机器人的期待不断增长,从最初的满足生产效率提升的需求,到现在多元化的生活服务。
我国机器人专家按照应用环境将机器人划分为工业机器人和特种机器人,前者专为工业生产设计,后者则包括服务机器人、水下机器人、军事机器人等多个细分领域,反映了人类对不同应用场景的智能化解决方案的需求。
1.2 机器人系统构成
一个完整的机器人系统包含五个关键组件:执行机构、驱动装置(如舵机)、检测装置、控制系统以及复杂的机械结构。执行机构负责执行具体的任务,如手臂或移动部分;驱动装置提供动力,如舵机确保关节的精确转动;检测装置用于感知周围环境或执行器状态;控制系统则整合这些信息,进行决策和控制;复杂机械则是实现机器人整体功能的基础结构。
本文着重介绍了舵机在这些组件中的作用,展示了其在现代机器人系统中的不可或缺性,以及如何通过单片机技术对其工作原理的深入理解和优化控制。理解这些原理对于研发更智能、更高效的机器人系统至关重要。
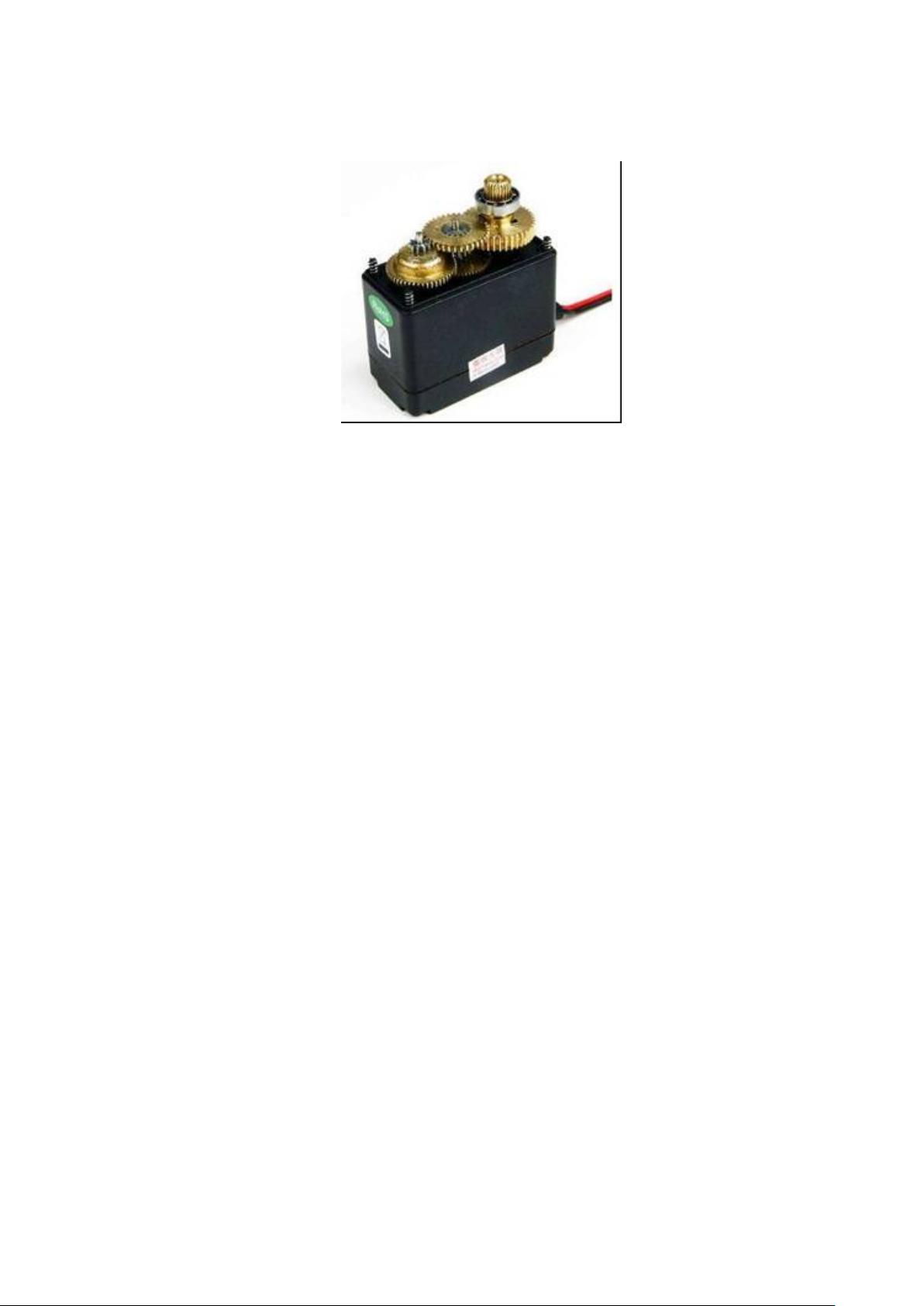
图 3 舵机实物图
舵机的外壳一般是塑料的,特殊的舵机可能会有铝合金外壳。金属外壳能够提供
更好的散热,可以让舵机内的电机运行在更高功率下,以提供更高的扭矩输出。金属
外壳也可以提供更牢固的固定位置。
齿轮箱有塑料齿轮、混合齿轮、金属齿轮的差别。塑料齿轮成本底,噪音小,但
强度较低;金属齿轮强度高,但成本高,在装配精度一般的情况下会有很大的噪音。
小扭矩舵机、微舵、扭矩大但功率密度小的舵机一般都用塑料齿轮,如 Futaba 3003,
辉盛的 9g 微舵。金属齿轮一般用于功率密度较高的舵机上,比如辉盛的 995 舵机。995
在和 3003 一样体积的情况下却能提供 13KG 的扭矩。Hitec 甚至用钛合金作为齿轮材
料,其高强度能保证 3003 大小的舵机能提供 20 几公斤的扭矩。混合齿轮在金属齿轮
和塑料齿轮间做了折中。
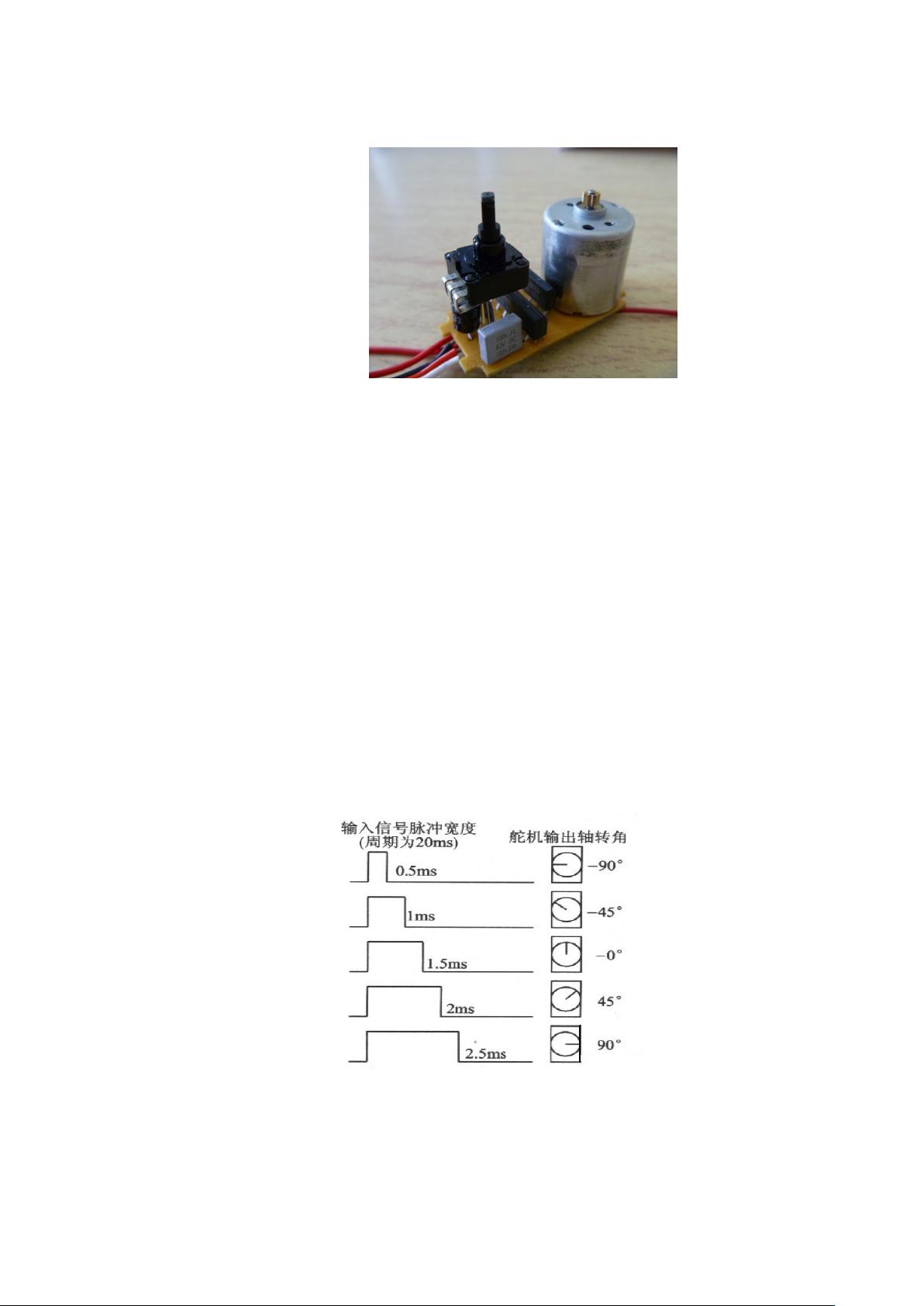
舵机的控制电路中,一般都含有两种芯片:信号调制芯片和电机驱动芯片,用信
号调制芯片来获得直流偏置电压,用驱动芯片驱动电机正反转,驱动芯片多为 H 桥,
这两块芯片就相当于控制电路的大脑,除了两种芯片外还有若干的电阻电容连接在电
路中。每一种舵机的控制电路中,所用的芯片型号各不相同,但是整体工作原理大致
相同。
图 4 为舵机内部实物图如下:
剩余30页未读,继续阅读
2022-07-07 上传
2012-04-19 上传
2023-07-12 上传
2021-10-04 上传
2023-07-12 上传
2019-06-27 上传

老帽爬新坡
- 粉丝: 92
- 资源: 2万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
