TF学习笔记:从视图到转换工具详解
需积分: 0 138 浏览量
更新于2024-08-05
收藏 928KB PDF 举报
本篇tf学习笔记主要介绍了Robot Operating System (ROS)中的几个关键工具,这些工具对于理解和管理机器人框架中的时空转换(transform)至关重要。TF,即Transform Feedback,是ROS中的一个核心模块,用于处理坐标系之间的变换,并确保各个节点之间的定位信息保持一致。
1. **tf_tree视图生成**:
`rosrun tf tf_view_frames` 是一个实用的命令行工具,可以创建一个实时更新的框架(frame)树状图。通过运行这个命令,用户可以生成一个PDF文件 `frames.pdf`,展示了当前系统中所有帧之间的关系,这对于理解传感器和执行器之间的相对位置非常有帮助。
2. **rqt_tf_tree工具**:
`rqt_tf_tree` 是一个图形用户界面(GUI)工具,它直观地显示了TF树,提供了实时的帧变换信息。通过`rosrun rqt_tf_tree rqt_tf_tree` 或者在RQT(Robot Operating System.qt Tools)中启动,用户可以更方便地监控和调试tf数据流。
3. **tf_monitor**:
`tf_monitor` 用于监视帧之间的变换,提供了一种实时查看和调试tf变换流的方法。通过输入如 `rosrun tf tf_monitor /base_link /odom`,用户可以跟踪特定帧之间的变换历史。
4. **tf_echo**:
`tf_echo` 是一个简单的命令行工具,用来显示两个指定帧之间的即时变换关系。例如,`rosrun tf tf_echo world/turtle` 可以查看世界坐标系(world)与乌龟(turtle)坐标系之间的变换。
5. **static_transform_publisher**:
这是一个命令行工具,用于发布静态的坐标变换。在launch文件中,它可以用来设置初始的或预定义的坐标系关系,如 `<launch>...</launch>` 部分所示。这个工具常用于初始化系统或者模拟静态场景。
6. **roswtf**:
`roswtf` 是ROS工作流测试框架(Work Flow Testing Framework)的一部分,用于检测TF和其他ROS服务的潜在问题。通过运行 `roswtf`,开发者可以检查tf广播器(broadcaster)是否正常工作,以及是否存在任何错误或冲突。
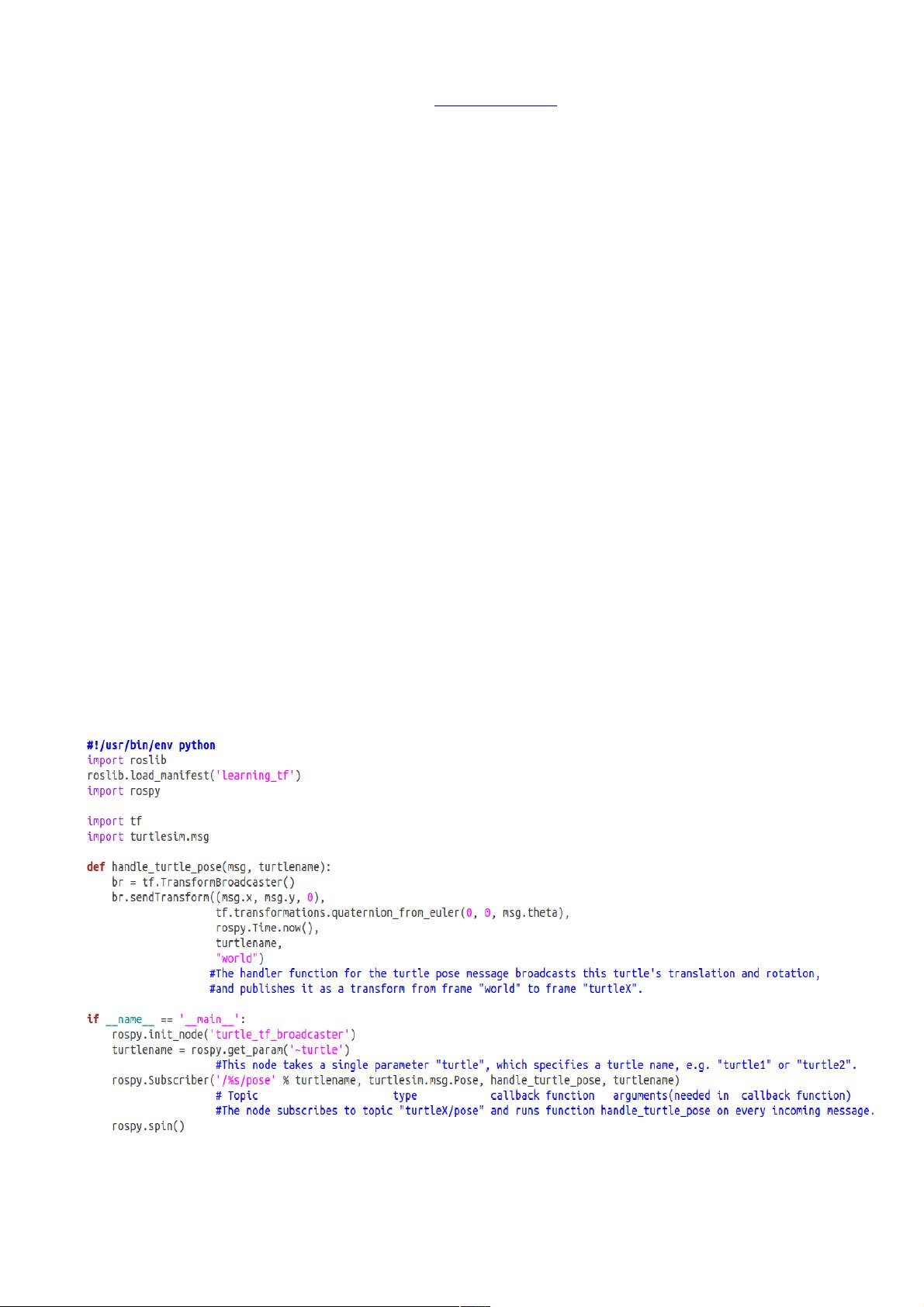
最后,学习笔记通过创建一个名为 "learning_tf" 的ROS包,演示了如何编写并运行一个TF广播器节点(broadcaster),并使用tf_echo来验证广播的坐标变换是否正确。这整个过程展示了实际应用中如何使用TF进行机器人框架的配置和调试。
这篇笔记深入浅出地讲解了ROS TF组件及其在机器人开发中的核心作用,适合初学者和进阶者参考。
TF Tutorial
tf Tools
1. view_frames:创建正在被广播的 frame 图表
rosrun tf view_frames
可以看到能够生成一个 tf tree 的 pdf 文件,打开该文件:
evince frames.pdf
2. rqt_tf_tree:显示 tf tree 的实时工具
rosrun rqt_tf_tree rqt_tf_tree
或 rqt &
3. tf_monitor:监督 frame 之间的变换
rosrun tf tf_monitor
rosrun tf tf_monitor /base_link /odom
4. tf_echo:显示两个坐标之间的变换关系
rosrun tf tf_echo [reference_frame] [target_frame]
5. static_transform_publisher:发送静态变换的命令行工具,也可用在 launch 文件中,例
<launch>
<node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1
100" />
</launch>
6. roswtf:打开 ftwtf 插件,追踪 tf 错误
roswtf
Writing a tf broadcaster(Python)
创建包:
cd ~/test/src
catkin_create_pkg learning_tf roscpp rospy turtlesim tf
cd ~/test
catkin_make
source ./devel/setup.bash
创建 tf broadcaster 节点:
roscd learning_tf
mkdir nodes
cd nodes
gedit turtle_tf_broadcaster.py
chmod +x turtle_tf_broadcaster.py
运行 broadcaster:
roscd learning_tf
mkdir launch
下载后可阅读完整内容,剩余7页未读,立即下载
2018-11-09 上传
2022-08-04 上传
2021-01-07 上传
2022-07-25 上传
点击了解资源详情
点击了解资源详情
2021-01-06 上传
2022-08-08 上传
2021-01-20 上传

郑瑜伊
- 粉丝: 23
- 资源: 317
 我的内容管理
展开
我的内容管理
展开







