卡尔曼滤波与PID结合的控制仿真研究
"基于卡尔曼滤波的PID仿真研究"
在控制系统设计中,PID(比例-积分-微分)控制器因其简单、有效而被广泛应用。然而,对于存在噪声和复杂动态特性的系统,常规PID控制器可能无法达到最优的控制性能。为解决这一问题,将卡尔曼滤波器引入到PID控制策略中,可以显著提高控制效果。
卡尔曼滤波是一种统计滤波方法,由鲁斯·卡尔曼在1960年提出,主要用于估计动态系统的状态。其核心思想是利用系统模型和观测数据,通过最小化预测误差来估计系统的状态。卡尔曼滤波器假设系统状态遵循高斯分布,同时考虑到噪声的存在,它能够在线性高斯系统中提供最佳的估计。在实际应用中,卡尔曼滤波器能有效过滤掉噪声,提取出有用的信息,尤其对白噪声有良好的抑制作用。
在PID控制中,卡尔曼滤波器的作用主要体现在两方面:一是改善偏差信号的质量,通过滤除噪声提高偏差的准确性;二是辅助PID参数的自适应调整,使得控制器能更好地应对系统动态特性的变化。在二阶滞后对象的控制问题中,由于存在时间延迟,控制响应往往会有延迟和振荡,通过结合卡尔曼滤波器,可以减少这些负面影响。
该研究中,作者对工业过程中的二阶滞后对象进行了仿真,采用常规PID控制器与加入卡尔曼滤波器的PID控制器进行对比。仿真结果显示,引入卡尔曼滤波器后,系统对白噪声的抑制能力增强,控制效果显著改善,表明这种方法在应对噪声干扰时有较大优势。
将卡尔曼滤波器应用于PID控制,不仅可以提升系统的抗干扰能力,还能优化控制性能,特别适合于噪声环境下的复杂系统控制。这种结合不仅保留了PID控制器的易用性和稳定性,还增强了系统的适应性和控制精度,为实际工程问题提供了更优的解决方案。在未来的研究中,可能还会探索更复杂的滤波器或滤波算法,以进一步提升控制系统的性能。
愿西琵交丽蘸醺j三荚莲{
控制系统
文章编号:1008—0570(2007)06—1-0079—03
基于卡尔曼滤波器的P
I
D控制仿真研究
A
Simulation
Study
of
PlD
Control
Based
on
Kalman
filter
(1.江苏工业学院;2.沈阳航空工业学院)邹
凌1
别、玉强1
别、
琦2
ZOU
LING
SUN
YUQIANG
SUN
QI
摘要:针对工业过程中常见的二阶滞后对象的PID参数调节问题,采用KALMAN滤波器同常规PID控制相结合的方法对系
统进行仿真研究。结果表明:同没有加卡尔曼滤波器的常规PID控制相比。卡尔曼滤波器很好的抑制了白噪声的污染。控制
效果明显改善。
关键词:PID控制;卡尔曼滤波器;白噪声
中图分类号:TP273
文献标识码:A
Abstract:Aim
to
optimize
PID
controller
parameters
of
second-order
system
models
with
time-delay
which
are
common
in
industry,
we
used
general
PID
control
method
combined
with
Kalman
filter
to
solve
the
problem.Simulation
showed
that
the
white
noise
was
suppressed
and
the
control
effect
had
been
improved
notably
because
of
Kalman
filter,compared
with the
general
PID
contr01.
Key
words:PID
control
Kalman
filter
process
noise
observation
noise
1引言
常规PID调节器是一种应用广泛、技术成熟的控制方法。
PID控制的基本思想是将偏差的比例、积分和微分三参数通过
线性组合构成控制器,对被控对象进行控制,采用PID控制时,
系统控制品质的优劣取决于上述三参数的整定。但在运动控制
领域中,对控制品质的要求越来越高,且控制对象越来越复杂,
特别是在具有强干扰噪声的工业过程中,因PID控制器的局限
性,控制器的参数难以自动调整,不能达到理想的控制效果。
卡尔曼滤波器是卡尔曼和布西于1960年和1961年提出来
的,不但适用于标量估计的平稳系统,对于多输入多输出的非平
稳的时变系统也能给出无偏最小的方差估计。另外。卡尔曼滤
波算法是一种递推算法,特别适用予在计算机上运行。因而,卡
尔曼滤波技术在空间技术、雷达、导航、控制等领域有着非常广
阔的应用前景。
对于系统中存在过程及测量噪声。状态变量受到污染.还有
一些变量由于多种原因不能在线检测。都可以利用卡尔曼滤波
技术进行滤波和估值。本文将卡尔曼滤波器与传统的PID控制
相结合,使控制效果得到了明显改善。
2基于卡尔曼滤波器的PID控制
2.1
PID控制原理
常用的PID控制器的离散算式为
“(露)=巧e(女)+K艺P(f)+髟k(七)一e(七一1)J
(1)
相应的增量形式为
Au(k)=“(七)一u(k一1)=Kle(k)一Kze(k一1)+Kse(k一2)(2)
式中驴竽,髟:竽。
墨=≮+墨+二d=Kp(1+iT+争局="≯Ks=K。/-竽
邹凌:讲师博士
基金项目:河南省自然科学基金资助项目(0324220079)
T为采样周期,Tj为微分时间常数,Td为积分时间常数,K。,
K;,K分别为比例系数,积分系数,微分系数,K,,K2,K3是与采样
周期、比例系数、积分时间常数、微分时间常数有关的系数。
2.2卡尔曼滤波原理
设向量非平稳状态序列Xk和Y。用下面的动态方程描述:
I坼+1=识“}墨+吐k
【),M
2Ck+l
kXk+1+咋(k≥0)
(2)
式中:Wk、vk_噪声;y广观测量冲1._系统矩阵;cf一观测矩阵
x。表示一组状态变量组成的多维状态向量
设k时刻的状态估计值为:≈=靠,M+Kk(Yt—Ck是斛),卡尔
曼滤波的递推步骤如下所示:
(1)状态一步预测:Xkllr-1
2靠,}-l如一l
(3)
(2)状态估计:
墨肛。=纯卢。嚣。髭¨+绞一。
(4)
(3)滤波增益:
髟=最。。c;(c}耳肛。《+母)-1
(5)
(4)一步预测均方差是=靠似t+q(坛一q靠,H)
(6)
(5)均方误差:
最=(,一也q)B似。
(7)
上述是卡尔曼滤波的基本方程,只要给定初值磊和Po,根
据k时刻的测量值Yt就可以通过递推计算得到k时刻的状态
估计殳k,
3基于卡尔曼滤波器的PID控制算
法及仿真
3.1基于卡尔曼滤波器PID控制的原理
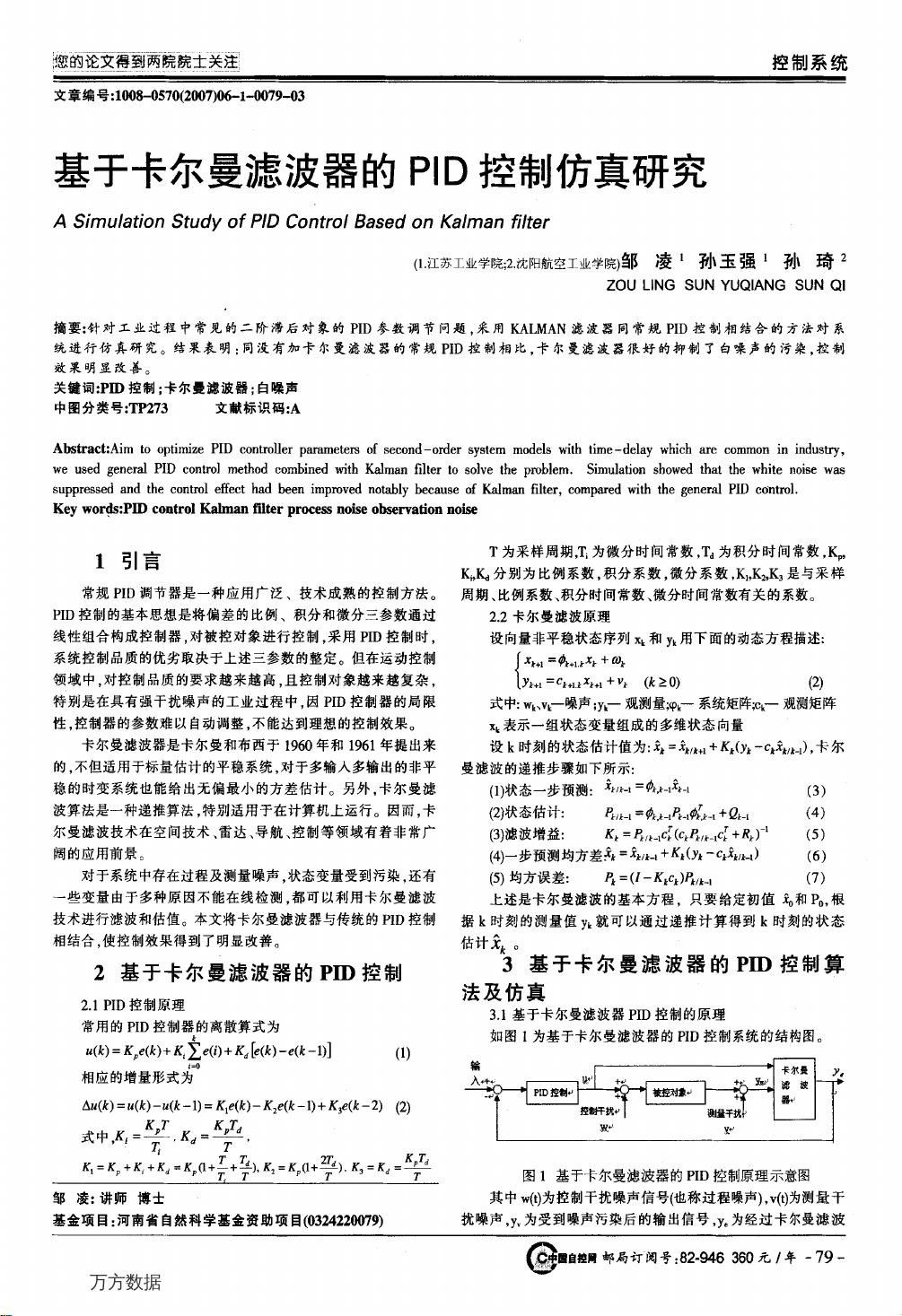
如图1为基于卡尔曼滤波器的PID控制系统的结构图。
图1基于卡尔曼滤波器的PID控制原理示意图
其中w(0为控制干扰噪声信号(也称过程噪声),v(f)为测量干
扰噪声,Y,为受到噪声污染后的输出信号,ye为经过卡尔曼滤波
自控胃郯局订阅号:82-946
360元,年一79—
万方数据
下载后可阅读完整内容,剩余5页未读,立即下载
2020-05-18 上传
2021-10-04 上传
2023-05-11 上传
2021-05-16 上传
2023-12-29 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2023-05-11 上传

liulyjft
- 粉丝: 0
- 资源: 3
 我的内容管理
展开
我的内容管理
展开







最新资源
- airclick-开源
- react-native-twitter:一个用于React Native的Twitter API客户端库
- 人工智能引论变声项目.zip
- matlab拟合差值代码-CP-Fit:自动拟合应力-应变数据和织构以实现晶体可塑性
- EX19_ADC.rar_嵌入式/单片机/硬件编程_C/C++_
- 我的日记:因为写日记是个好习惯
- 八梦企业网站源代码
- 人工智能聊天机器人.zip
- 投资组合:项目投资组合管理
- sentry-phabricator:与Phabricator集成的Sentry扩展
- 伪造的中文名称:生成随机中文人名的Sketch插件
- x.rar_matlab例程_matlab_
- 船板
- ahcitool-开源
- Face_Mask_Detector:应用程序可检测您是否在口罩上
- Arabic Word diversity-开源
