摄影测量学考研重点整理
需积分: 0 116 浏览量
更新于2024-09-22
收藏 90KB DOC 举报
"考研摄影测量总结"
摄影测量学是一门利用光学或数字摄影技术来研究和测定地球表面物体的形状、大小、位置和相互关系的科学技术。它的发展经历了三个主要阶段:模拟摄影测量、解析摄影测量和数字摄影测量。在模拟阶段,主要依赖物理模型进行测量;解析阶段引入了数学解析方法;而数字摄影测量则是当前的主要形式,利用计算机处理图像数据,实现自动化和高精度的测量。
航空影像的获取是摄影测量的重要环节,主要通过航空摄影机和普通数字摄影机来实现。航空摄影机专为高空拍摄设计,能获取高分辨率的地表影像;而普通数字摄影机则常用于地面或低空的辅助拍摄。
遥感技术是摄影测量的延伸,它通过传感器在非接触状态下获取地物的特征信息,用于地理信息系统(GIS)的构建和各类工程的数据支持。遥感和摄影测量的共同点在于都是通过图像来获取和分析地表信息。
比例尺是衡量影像与实地尺寸关系的关键概念,航摄像片上的1单位长度对应地面的实际水平距离。比例尺分为两种:真(实际)比例尺和缩放比例尺。在航测中,比例尺的计算公式为1/m=1/L,其中m是比例尺,L是地面上相应线段的水平距离。
摄影测量的生产过程中,对摄影资料有严格的要求,包括:
1) 影像质量:要求影像清晰、色调一致,避免阴影影响;
2) 重叠度:航向重叠和旁向重叠确保影像拼接的准确性和立体视觉的形成;
3) 像片倾角:保持主光轴接近垂直,偏差不超过3º,以减少畸变;
4) 航线弯曲:航线弯曲度小于3%,保证航线的直线性;
5) 像片旋角:控制在6º以内,确保框标对准。
航摄像片上的特殊点、线、面有助于定位和解析,例如像主点o、像底点n、等角点c、主合点i、主纵线vv、合线hihi、等比线hchc以及基本方向线VV和主垂面W等,它们在解译和重建三维空间信息时起到关键作用。
摄影测量中涉及两种坐标系:像方坐标系描述像点位置,包括平面和空间坐标;物方坐标系则用于表示地面点的位置,如地面测量坐标系和地面摄影测量坐标系。这两种坐标系之间的转换是摄影测量解析的核心。
方位元素是描述摄影机在空中拍摄时的位置和姿态的关键参数,分为内方位元素和外方位元素。内方位元素包括摄影中心S到像片的垂距f,以及像主点o在框标坐标系中的x坐标,这些参数固定了摄影机内部结构。外方位元素则描述摄影中心在地面坐标系中的位置和姿态,通常包括六个参数,即三个位置参数和三个姿态参数。
这些知识点对于理解和实践摄影测量至关重要,尤其对于准备考研的学生,深入掌握这些概念和技术将有助于在考试中取得优异成绩。
1、摄影测量学的定义、任务和发展
定义:传统的摄影测量学是利用光学摄影机摄取像片,通过像片来研究和确定被摄物体的形状、大小、位置和相互关系的一
门科学技术。
摄影测量学的三个发展阶段:模拟摄影测量、解析摄影测量 数字摄影测量(填空)
任务:测制各种比例尺的地形图、建立各种数据库; 提供地理信息系统和各种工程所需要的基础数据。
2、航空影像的获取方式:航空摄影机和普通数字摄影机(填空)
3、遥感通常是指通过某种传感器装置,在不与被研究对象直接接触的情况下,获取其特征信息,并对这些信息进行提取、加
工、表达和应用的一门科学和技术。
4、比例尺:指航摄像片上一线段为 l 的影像与地面上相应线段的水平距离 L 之比,即 1/m=1/L。
5、绝对航高:摄影瞬间摄影机物镜中心相对于平均海水面的航高。
相对航高:摄影瞬间摄影机物镜中心相对于其他某一基准面或某一点的高度。
6、摄影测量生产对摄影资料的基本要求
(1)影像的色调:影像清晰、色调一致、无阴影;
(2)像片重叠:沿航线方向相邻两张像片应有 60%左右的航向重叠,相邻航线间的像片应有 30%左右的旁向重叠。航向
重叠:同一条航线上,相邻两像片应有一定范围的影重叠。p%=60%~65%,最小 53%。旁向重叠:相邻航线也应有足够的
重叠。q%=30%~40%,最小 15%。航摄漏洞:航向、旁向重叠小于最低要求,需航测外业补测。
(3)像片倾角:摄影瞬间摄影机的主光轴近似与地面垂直,偏离铅垂线的夹角小于 3º,夹角为像片倾角。
(4)航线弯曲:航线最大弯曲矢量与航线长度之比的百分数。要求航线弯曲度 <3%。
(5)像片旋角:一张像片上相邻主点连线与同方向框标连线间的夹角,要求像片旋角<6º。
7、航摄像片上特殊的点、线、面:像主点 o、像底点 n、等角点 c、主合点 i、主纵线 vv、合线 h
i
h
i
、等比线 h
c
h
c
、基本方向
线 VV 及主垂面 W 等。
8、摄影测量中常用坐标系有两大类:
一是描述像点的位置,即像方坐标系,用来表示像点的平面坐标和空间坐标、像空间辅助坐标
二是描述地面点的位置,即物方坐标系,有地面测量坐标系及地面摄影测量坐标系。
9、方位元素:描述航空摄影瞬间摄影中心与像片在地面设定的空间坐标系中的位置与姿态的参数。
内方位元素:表示摄影中心与像片之间相关位置的参数;包括三个参数:摄影中心 S 到像片的垂距 f 及像主点 o 在框标坐
标系中的坐标 x
o
、y
o
外方位元素:表示摄影中心和像片在地面坐标系中的位置和姿态的参数。包括六个参数:三个直线元素和三个角元素。
10、以 Y 轴为主轴的 φ,ω,κ 转角系统:
航向倾角 φ:主光轴 SO 在 XZ 平面上的投影 SOX 与 Z 坐标轴的夹角。角的符号沿 Y 轴正方向朝向坐标原点方向观察,顺时
针为正。
旁向倾角 ω:摄影方向 SO 与其在 XZ 平面上的投影 SOX 的夹角。角的符号沿 X 轴正方向向坐标原点方向观察,逆时针为正。
像片旋角 κ:Y 坐标轴与 SOXO 组成的平面与像片平面的交线和像平面直角坐标系 y 轴的夹角。
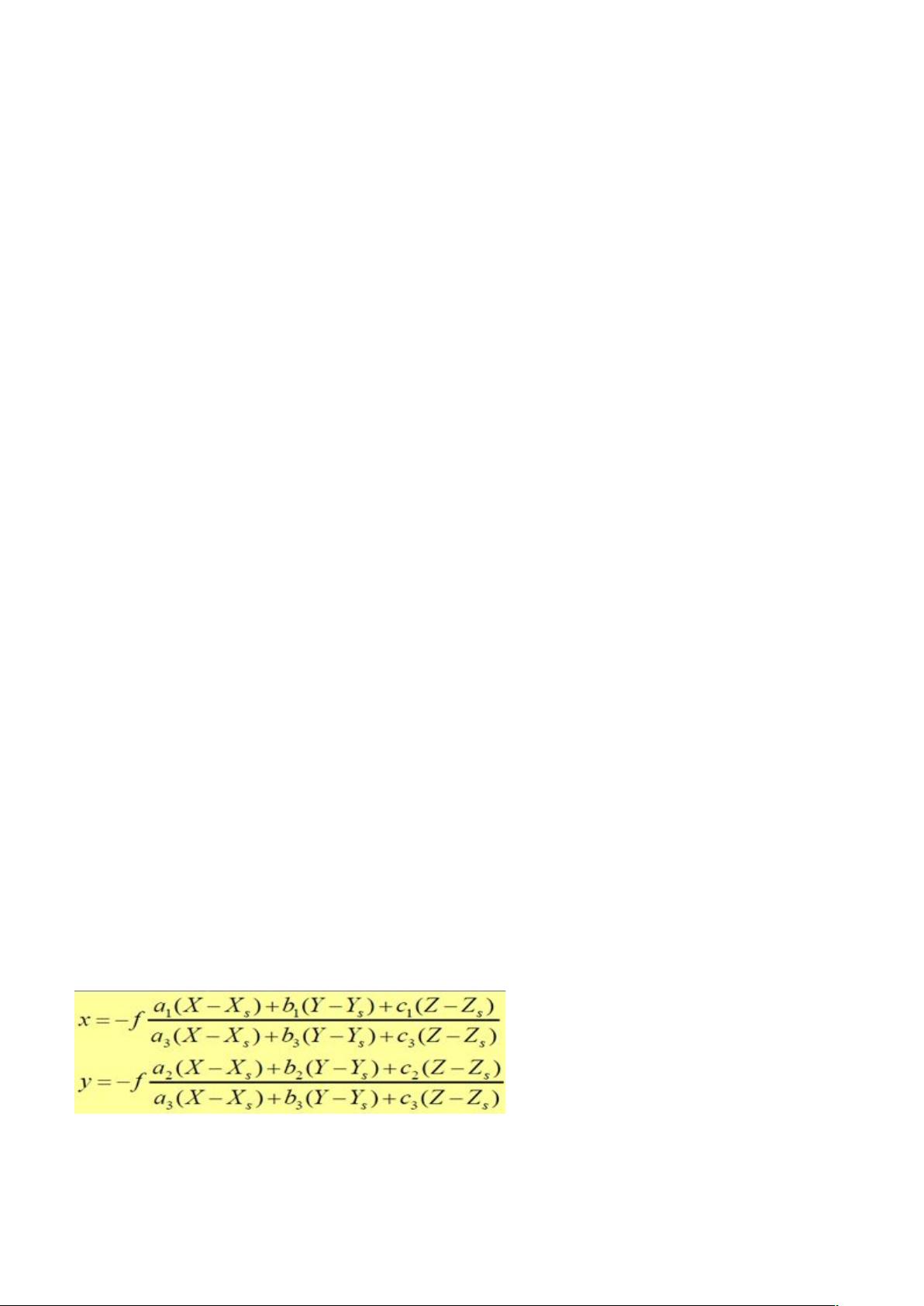
11、若投影光线相互平行且垂直于投影面,称为正射投影。若投影光线会聚于一点,称为中心投影。航摄像片为中心投影,地
形图为正射投影。
中心投影构像方程式:
其 中 包 括 12 个 数 据 : 以 像 主 点 为 原 点 的 像 点 坐 标
x、y,相应地面点坐标 X、Y、Z,像片主距 f 及外方位元素 X
s
、Y
s
、Z
s
、φ、ω、k。它是摄影测量中最重要的公式,在解析摄
影测量与数字摄影测量中是极其有用的,单像空间后交、双像摄影测量光束法、解析测图仪原理及数字影像纠正等都要用到。
1
下载后可阅读完整内容,剩余3页未读,立即下载
2012-05-28 上传
2010-03-23 上传
点击了解资源详情
2012-05-09 上传
2012-05-18 上传
2021-04-01 上传
2010-11-24 上传
2011-08-27 上传
2012-11-26 上传

小章
- 粉丝: 13
- 资源: 86
 我的内容管理
展开
我的内容管理
展开







最新资源
- WordPress作为新闻管理面板的实现指南
- NPC_Generator:使用Ruby打造的游戏角色生成器
- MATLAB实现变邻域搜索算法源码解析
- 探索C++并行编程:使用INTEL TBB的项目实践
- 玫枫跟打器:网页版五笔打字工具,提升macOS打字效率
- 萨尔塔·阿萨尔·希塔斯:SATINDER项目解析
- 掌握变邻域搜索算法:MATLAB代码实践
- saaraansh: 简化法律文档,打破语言障碍的智能应用
- 探索牛角交友盲盒系统:PHP开源交友平台的新选择
- 探索Nullfactory-SSRSExtensions: 强化SQL Server报告服务
- Lotide:一套JavaScript实用工具库的深度解析
- 利用Aurelia 2脚手架搭建新项目的快速指南
- 变邻域搜索算法Matlab实现教程
- 实战指南:构建高效ES+Redis+MySQL架构解决方案
- GitHub Pages入门模板快速启动指南
- NeonClock遗产版:包名更迭与应用更新
