形状判别机械手:自动化分拣与定位技术详解
版权申诉
151 浏览量
更新于2024-06-20
收藏 237KB DOCX 举报
形状判别机械手实习机是一款专用于自动化识别和分类不同形状工件的设备,其核心目的是通过输送带将方形和圆形工件按照预定顺序送至指定位置,并利用传感器准确判断并放置到对应的出料区域。整个系统设计包含机台的机构组和控制组两个主要部分。
(1) 机构组: 该组负责机械的实体操作。首先,当机器处于待命状态时,输送带电机停在末端上方,龙门型机械臂停在初始位置。操作过程中,用户可以通过PB1、PB2、PB3、PB4和PB5等按钮控制输送带的运动、垂直气压缸的动作以及气压夹爪的开闭。例如,放圆料时,先将圆料放入进料位置,按下PB1后,输送带运行并定位到圆料V型挡料治具,龙门臂移动至C处并自动停止,夹爪关闭并松开后,圆料滑下斜坡。对于方料,流程类似但移动至D处。
(2) 控制组: 这部分涉及系统的逻辑控制和流程管理。机械手具有单一循环功能,通过选择开关SW1切换到"ON"位置,每次放一个工件到输送带前端,根据传感器检测到的不同形状(圆形或方形),机械臂会相应地抓取并送到对应出料槽。循环结束后,系统返回机械原点,且通过指示灯显示运行状态。紧急停止功能则确保在出现异常情况时,能迅速断电并保持夹持中的工件不掉落。解除紧急停止后,还需执行复归操作,恢复到正常运行状态。
这个形状判别机械手实习机是工业自动化的一个实例,展示了如何运用传感器、气动元件和控制器的结合,实现高效、精确的物料分拣,提高生产效率和产品质量。通过学习和操作这款实习机,学生或工程师可以深入了解机械手臂的运动控制、传感器应用以及工业自动化的基本原理。
X14
LS1
左极限开关
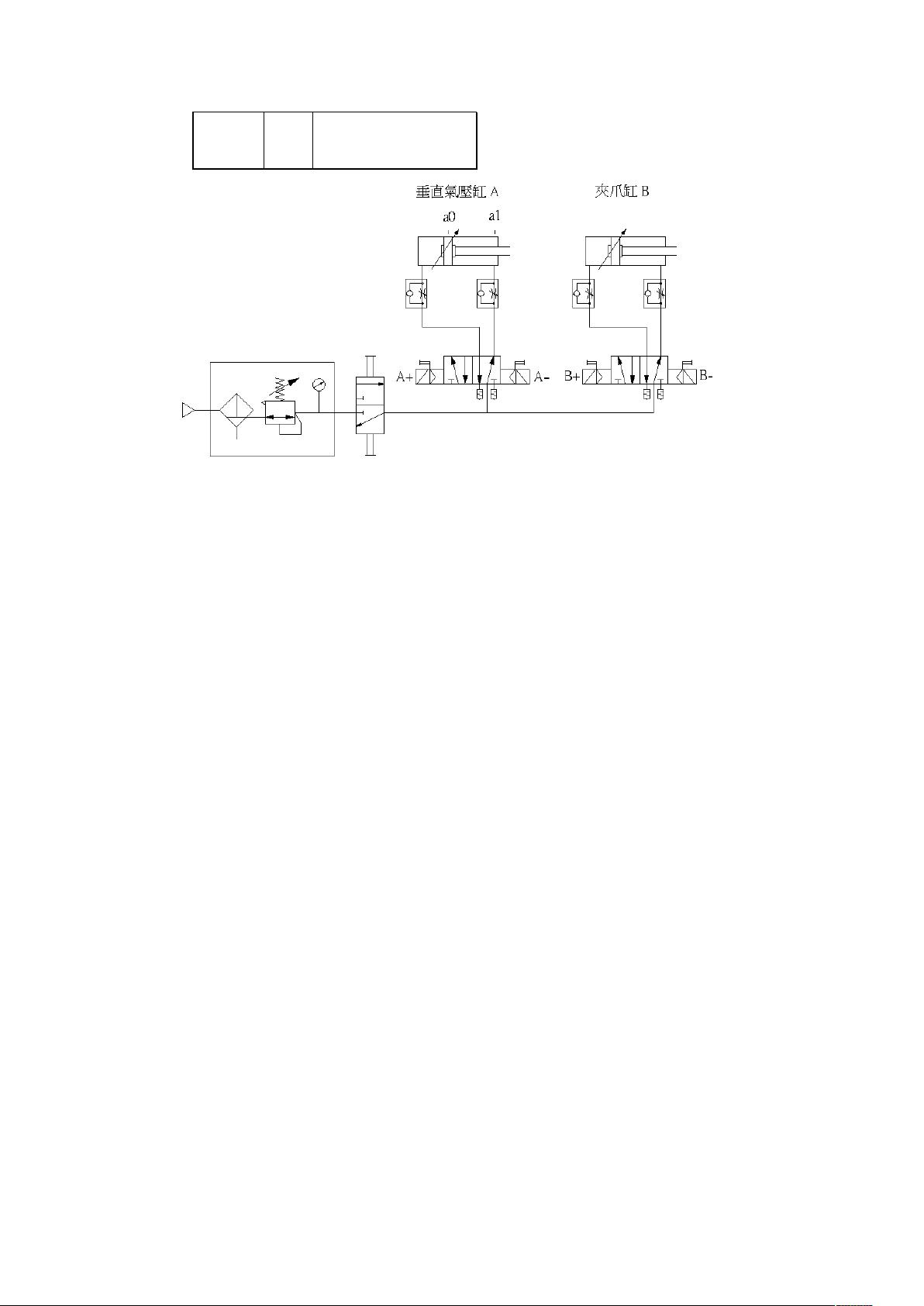
III. 气压回路图
IV. 动作操作说明:
机械原点:
输送带马达停止,龙门型机械手停驻在输送带末端点上方(p0);垂直气压
缸缩回至上端点(a0)。
(1)机构组
(A) 按下 EMS 开关可切断控制盘电源,解除 EMS 开关可启动控制盘电源。
(B) 将圆料放入 A 处进料位置,按下 PB1 开关,输送带运转,方向、速度正确,
可将工件送至端点圆料 V 型檔料治具,并正确摆置完成。
(C) 按下 PB2 垂直气压缸下降,按下 PB4 气压夹爪闭合,按下 PB3 垂直气压缸
上升。
(D)选择开关 SW1 左切,龙门螺杆机械手臂向左移动,至 C 处斜坡自行停止。
(E) 按下 PB5 气压夹爪打开,圆料滑落斜坡。
(F) 选择开关 SW1 右切,龙门螺杆机械手臂向右移动,至端点档料治具自行停
止。
(G)将方料放入 A 处进料位置, 按下 PB1 开关,输送带运转,可将工件送至端
剩余14页未读,继续阅读
2022-11-25 上传

南抖北快东卫
- 粉丝: 80
- 资源: 5587
 我的内容管理
展开
我的内容管理
展开







最新资源
- 高清艺术文字图标资源,PNG和ICO格式免费下载
- mui框架HTML5应用界面组件使用示例教程
- Vue.js开发利器:chrome-vue-devtools插件解析
- 掌握ElectronBrowserJS:打造跨平台电子应用
- 前端导师教程:构建与部署社交证明页面
- Java多线程与线程安全在断点续传中的实现
- 免Root一键卸载安卓预装应用教程
- 易语言实现高级表格滚动条完美控制技巧
- 超声波测距尺的源码实现
- 数据可视化与交互:构建易用的数据界面
- 实现Discourse外聘回复自动标记的简易插件
- 链表的头插法与尾插法实现及长度计算
- Playwright与Typescript及Mocha集成:自动化UI测试实践指南
- 128x128像素线性工具图标下载集合
- 易语言安装包程序增强版:智能导入与重复库过滤
- 利用AJAX与Spotify API在Google地图中探索世界音乐排行榜
