MATLAB平台下的钢板磁悬浮控制系统设计与仿真研究
版权申诉
本文主要探讨了基于MATLAB的钢板磁悬浮控制系统的研究,涵盖了系统建模、仿真分析以及控制器设计。首先,研究者构建了单块钢板、垂直带钢和水平带钢三种不同类型的钢板磁悬浮系统模型,通过对电磁力模型和非线性运动方程的深入分析,建立了系统的非线性系统模型。MATLAB在此过程中被用于仿真,揭示了磁悬浮系统的非线性特性和潜在的不稳定性质。
针对垂直带钢磁悬浮系统,进行了线性化处理,以便于后续的控制设计。PID控制器的设计是研究的关键部分,针对电流控制对象采用了一种适用于不稳定系统的PID控制器设计策略,而电压控制对象则采用极点配置法,两者都取得了良好的控制效果。
文章进一步引入了无限增益(H)控制器的设计,特别是在电流控制对象上应用了混合灵敏度设计方法。研究发现,H控制器在应对质量摄动等不确定因素时展现出良好的鲁棒性。同样,对电压控制对象的H控制器设计也验证了其优越的控制性能。
该论文以磁悬浮技术为核心,结合MATLAB强大的数值计算和模拟功能,探讨了多种控制策略,不仅提升了钢板磁悬浮系统的性能,还为实际应用中的磁悬浮系统设计提供了理论支持。通过各章节的深入分析和仿真,研究者揭示了磁悬浮系统动态特性与控制策略之间的复杂关系,为磁悬浮技术的发展和优化提供了有价值的研究成果。
基于 MATLAB 的钢板磁悬浮控制系统研究
– 10 –
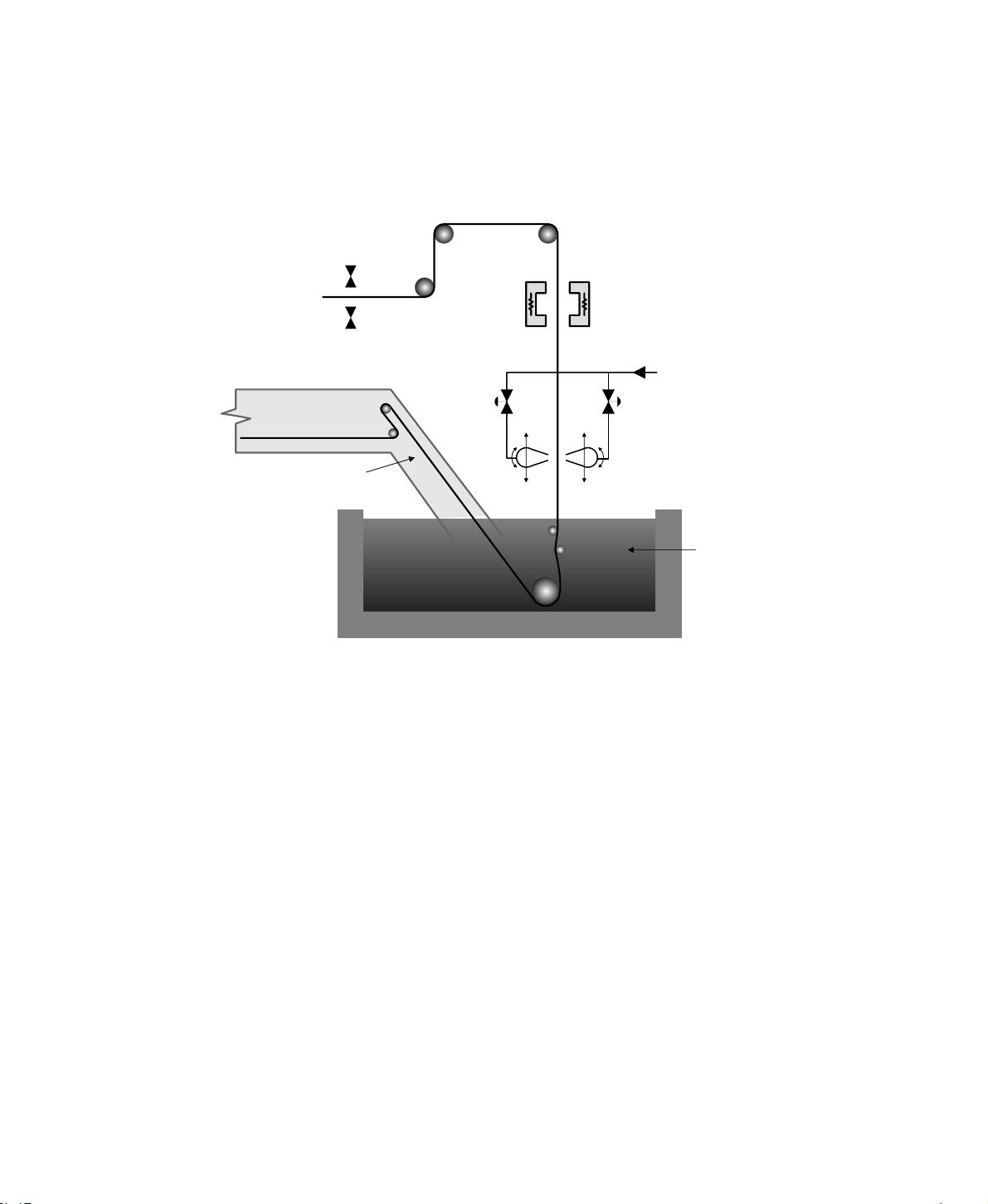
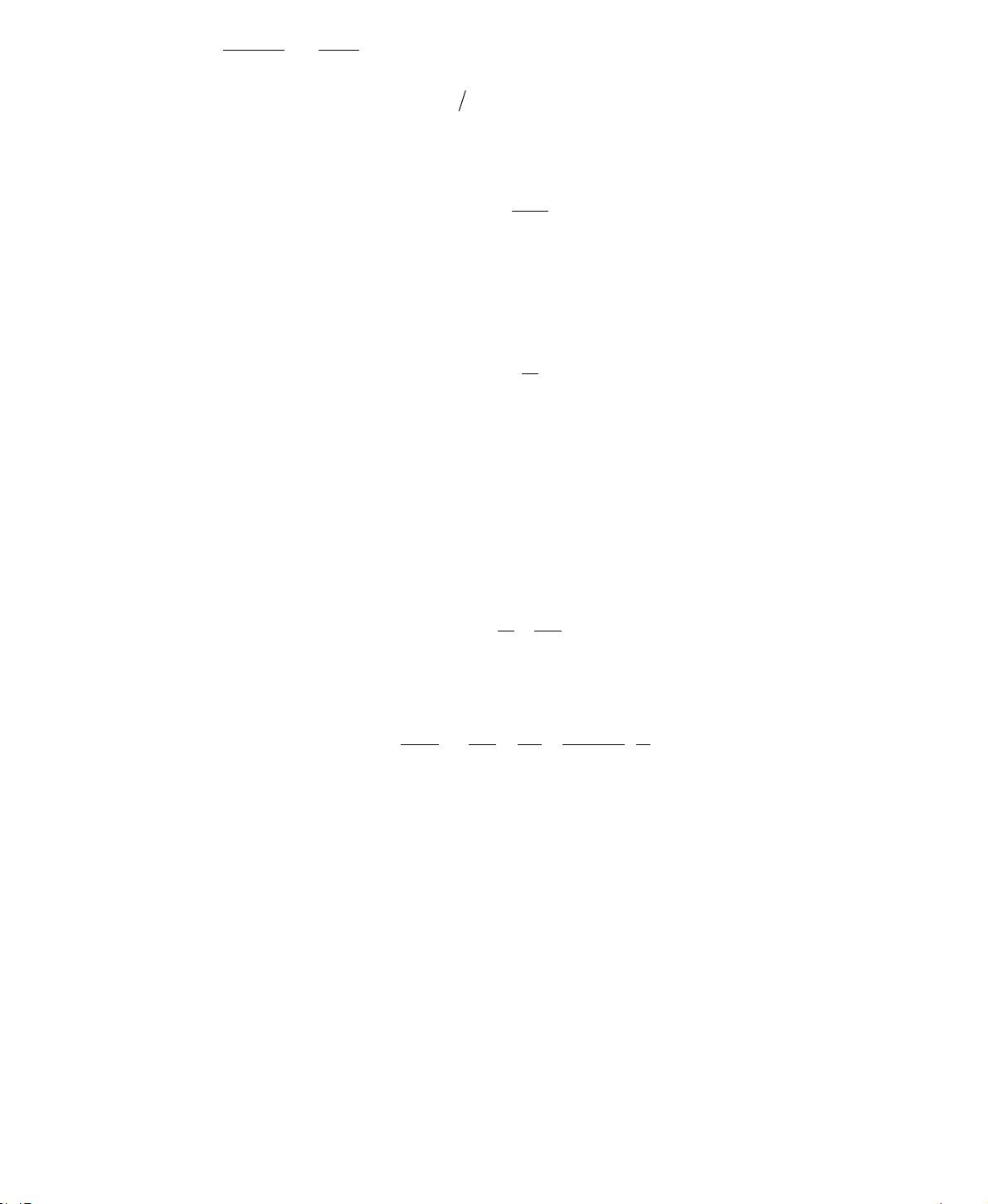
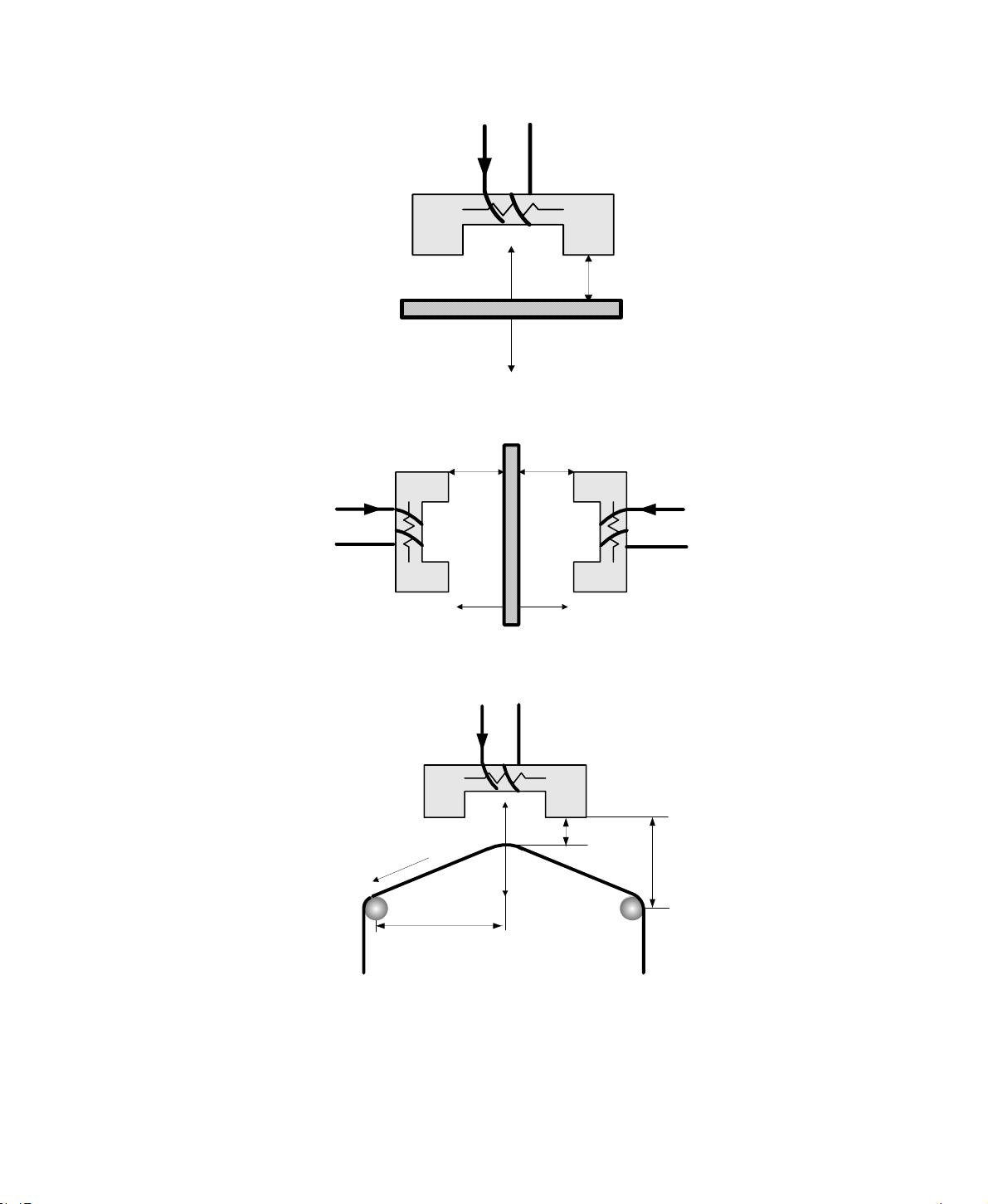
带钢产生一定角度的向上弯曲提拉效果。
本章在分析系统非线性数学模型的基础上,设计了一个兼顾三种钢板磁悬浮系
统共性与异性的综合性系统框图,以方便于后续仿真研究。在此基础上,基于
MATLAB 仿真得出系统的响应曲线,从而对系统对象的非线性和不稳定性有了进一
步的了解。基于后续章节中利用线性系统理论对系统进行控制器设计的需要,以垂
直带钢磁悬浮系统为代表,建立了线性化的系统电流控制及电压控制对象模型。
加热炉
镀锌槽
带钢
压缩气体供应
镀锌带钢
镀锌质量计
电磁铁
固定辊
锌液
图 2-1 镀锌过程示意图
FIGURE 2-1 Coating Mass Control Schematic
2.2 非线性系统模型建立
2.2.1 电磁力模型分析
首先讨论用电磁铁线圈电流 i和电磁铁与钢板气隙间距 y表示的电磁铁对钢板的
吸引力 F 表达式:
磁路的磁阻由下列关系表示
[39]
:
剩余68页未读,继续阅读
2023-10-30 上传
2023-10-29 上传
2023-12-20 上传
2020-10-17 上传
2023-10-30 上传
点击了解资源详情
点击了解资源详情
2024-11-12 上传

「已注销」
- 粉丝: 842
- 资源: 3601
 我的内容管理
展开
我的内容管理
展开







最新资源
- PureMVC AS3在Flash中的实践与演示:HelloFlash案例分析
- 掌握Makefile多目标编译与清理操作
- STM32-407芯片定时器控制与系统时钟管理
- 用Appwrite和React开发待办事项应用教程
- 利用深度强化学习开发股票交易代理策略
- 7小时快速入门HTML/CSS及JavaScript基础教程
- CentOS 7上通过Yum安装Percona Server 8.0.21教程
- C语言编程:锻炼计划设计与实现
- Python框架基准线创建与性能测试工具
- 6小时掌握JavaScript基础:深入解析与实例教程
- 专业技能工厂,培养数据科学家的摇篮
- 如何使用pg-dump创建PostgreSQL数据库备份
- 基于信任的移动人群感知招聘机制研究
- 掌握Hadoop:Linux下分布式数据平台的应用教程
- Vue购物中心开发与部署全流程指南
- 在Ubuntu环境下使用NDK-14编译libpng-1.6.40-android静态及动态库
