AVR微控器实现的低成本汽车防追尾安全系统
需积分: 0 124 浏览量
更新于2024-08-31
收藏 473KB PDF 举报
"一种基于AVR的新型防汽车追尾安全装置的设计"
本文介绍了一种基于AVR微控制器的防汽车追尾安全装置设计,旨在解决高速公路交通事故频发,特别是追尾事故的问题。随着我国汽车数量的不断增长和高速公路的快速发展,交通事故的发生率显著提升,其中追尾事故占据了相当大的比例,而多数此类事故源于驾驶员的反应延迟或判断错误。现有的防碰撞设备主要存在于高端车型,且通常只关注车头或车尾的安全,这激发了设计一种成本低、适用性强的全方位防追尾装置的需求。
1. 引言
汽车追尾事故的严重性促使研究人员开发更智能、更经济的安全解决方案。基于AVR的系统能够提供实时监测和预警,以减少这类事故的发生。
2. 安全装置组成和硬件电路设计
安全装置的核心是单片机控制系统,主要由以下几个部分构成:
2.1 单片机ATmega8L
该装置采用Atmel公司的ATmega8L作为主控芯片,它具备高性能、低功耗的特点,集成了多种功能,如A/D转换器、定时器/计数器、中断系统和睡眠模式,支持在线编程,适应性强且成本较低。工作电压范围宽,能应对不同的应用场景。
2.2 加速度传感器MMA7260QT
传感器MMA7260QT是一款三轴加速度传感器,能够检测车辆在XYZ三个方向的动态和静态加速度,监测微小震动和车辆倾斜,提供四种可选量程,确保对各种加速度变化的精确测量。
2.3 激光雷达
激光雷达用于检测前方车辆的距离,通过发射激光脉冲并分析反射回来的时间,计算出与前车的安全距离,当距离过近时,系统会触发预警。
2.4 LED刹车灯
增强型LED刹车灯能够在紧急情况下快速闪烁,向后方车辆发出警示,提高反应时间。
2.5 电源电路
电源部分保证整个系统的稳定供电,可能包括电池和车辆电源管理系统,以适应不同行驶条件下的供电需求。
3. 系统工作原理
该装置通过加速度传感器监测车辆的动态状态,激光雷达持续检测前方车辆的距离。当检测到潜在危险,如与前车的距离过近,单片机会立即处理这些数据,通过算法判断是否需要发出警告。如果满足预警条件,不仅会通过LED刹车灯发出视觉警告,还可能通过车内警告音或振动等方式提醒驾驶员采取行动。
4. 结论
这种基于AVR的防汽车追尾安全装置设计,结合了先进的传感器技术和智能控制策略,有望降低追尾事故的发生,提升道路行车安全性,尤其适用于中低端车型,具有广泛的市场潜力。
这种设计体现了现代汽车安全技术的发展趋势,即通过智能化、网络化手段提升驾驶安全,减少人为因素导致的事故,对于未来智能交通系统的发展具有重要意义。
一种基于一种基于AVR的新型防汽车追尾安全装置的设计的新型防汽车追尾安全装置的设计
随着我国汽车保有量逐年增加,高速公路的发展使得汽车的行驶速度越来越快。车流量也越来越大,导致高速
公路交通事故频频发生,其发生率甚至达到普通公路的4 倍,且有上升趋势。在高速公路所发生的交通事故中尤
以汽车追尾居多,约占30%~40%,而在这些事故中,80%以上的事故是由于司机反应不及时或者判断失误引
起的。由于目前只有高档车型才配有防碰撞装置,而且以往设计中只单纯考虑在车前或车后安装防碰撞装置,
不尽全面,所以设计一套低成本、通用性好的汽车防车前车后追尾的安全装置具有广阔的应用和市场前景。因
此。这里提出一种基于AVR的新型防汽车追尾安全装置设计。
1 引言引言
随着我国汽车保有量逐年增加,高速公路的发展使得汽车的行驶速度越来越快。车流量也越来越大,导致高速公路交通事
故频频发生,其发生率甚至达到普通公路的4 倍,且有上升趋势。在高速公路所发生的交通事故中尤以
2 安全装置组成和硬件电路设计安全装置组成和硬件电路设计
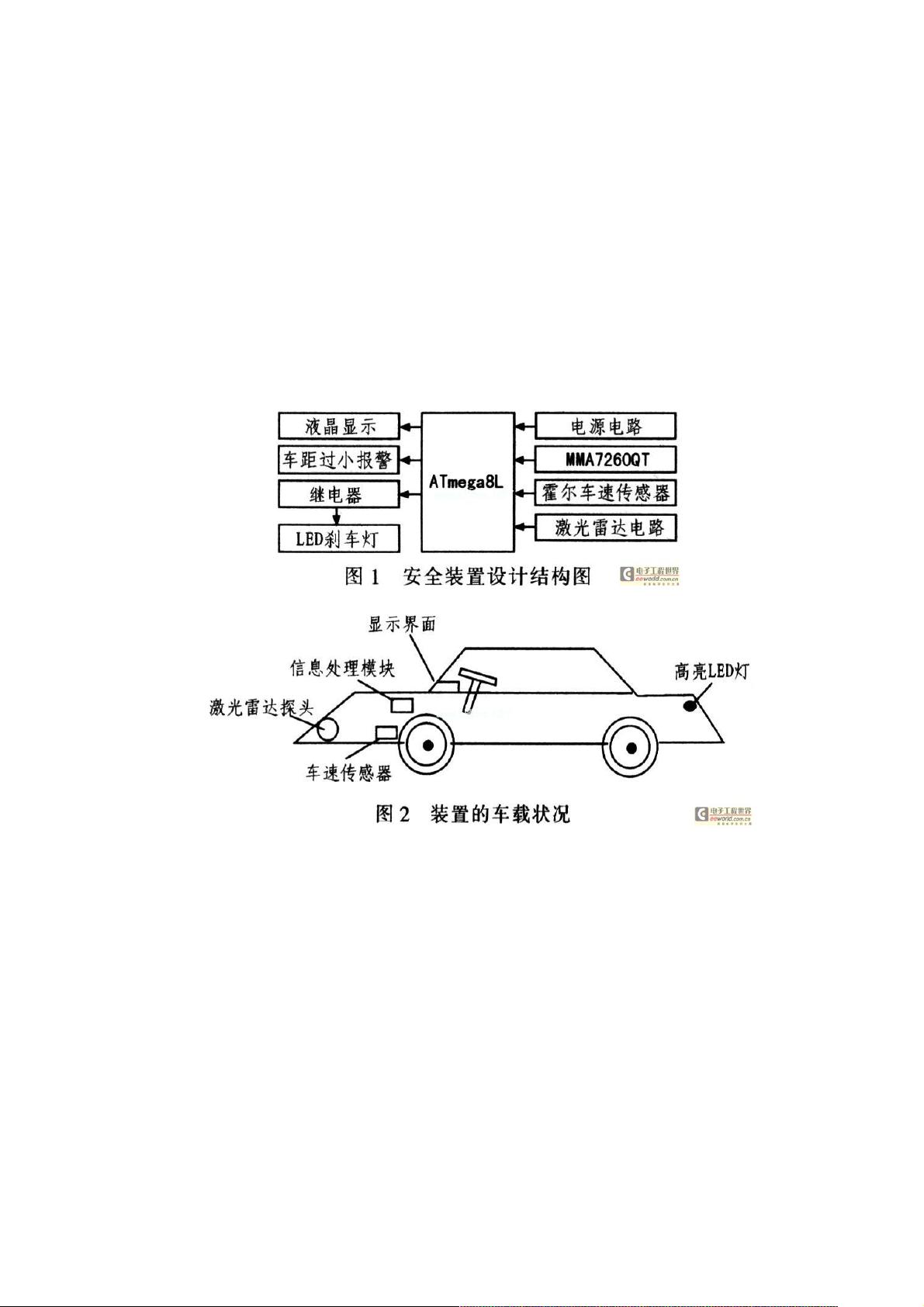
安全装置硬件电路设计主要由单片机控制、加速度传感器、激光雷达、LED刹车灯及电源等电路组成,如图1所示,装置
车载状况如图2所示。
2..1 单片机单片机ATmega8L
该设计选用高性能、低功耗单片机CMOS 工艺微控制器,器件内部集成有模拟比较器,6通道1O位(TOFP与MLF封装为
8通道)的A/D转换器,3个具有比较模式的灵活定时器/计数器,512 字节的EEPROM,片内/外中断,5种可通过软件选
择的睡眠模式,以及8 KB的系统内可编程Flash存储器(可随时在线编程),易于产品设计和更新。同时,ATmega8L可达到
接近1 MIPS/MHz的性能,运行速度比普通CISC单片机高出10倍,并且该器件价格不高,为许多嵌入式控制应用提供灵活且
低成本的解决方案。另外,ATmega8L的工作电压为2.7~5.5 V,非常适用于那些电压波动较大的场合。
2..2 加速度传感器加速度传感器MMA7260QT与单片机与单片机接口接口设计设计
该系统设计选用加速度传感器MMA72600T,测量加速度。该器件采用MEMS原理制作的低成本、低功耗、单芯片集成
XYZ三轴感应加速度传感器,可准确测量0~350 Hz、±6 g范围内动态或静态加速度,还能够监测车体微小震动和整车的倾斜
角度。该器件内部集成了信号调理、单极低通滤波器和温度补偿技术,并提供4个量程 (1.5g、2 g、4 g、6 g)可选,2.2
~3.6 V单电源供电,工作电流小于500μA,休眠模式下最低供电电流仅为3μA。
MMA7260QT加速度传感器采集汽车加速度数据,并将数据通过ATmega8L的PD7(AIN1)端口传输至ATmega8L,其具
体连接电路如图3所示。
下载后可阅读完整内容,剩余3页未读,立即下载
2021-01-18 上传
2020-10-23 上传
2020-08-12 上传
2020-08-27 上传
点击了解资源详情
点击了解资源详情
点击了解资源详情
2024-11-16 上传
2024-11-16 上传

weixin_38708461
- 粉丝: 5
- 资源: 993
 我的内容管理
展开
我的内容管理
展开







最新资源
- 平尾装配工作平台运输支撑系统设计与应用
- MAX-MIN Ant System:用MATLAB解决旅行商问题
- Flutter状态管理新秀:sealed_flutter_bloc包整合seal_unions
- Pong²开源游戏:双人对战图形化的经典竞技体验
- jQuery spriteAnimator插件:创建精灵动画的利器
- 广播媒体对象传输方法与设备的技术分析
- MATLAB HDF5数据提取工具:深层结构化数据处理
- 适用于arm64的Valgrind交叉编译包发布
- 基于canvas和Java后端的小程序“飞翔的小鸟”完整示例
- 全面升级STM32F7 Discovery LCD BSP驱动程序
- React Router v4 入门教程与示例代码解析
- 下载OpenCV各版本安装包,全面覆盖2.4至4.5
- 手写笔画分割技术的新突破:智能分割方法与装置
- 基于Koplowitz & Bruckstein算法的MATLAB周长估计方法
- Modbus4j-3.0.3版本免费下载指南
- PoqetPresenter:Sharp Zaurus上的开源OpenOffice演示查看器
