差动转向无人车路径跟踪控制研究
版权申诉
PDF格式 | 4.23MB |
更新于2024-06-19
| 39 浏览量 | 举报
"本文主要探讨了差动转向无人车的路径跟踪控制技术,涉及了车辆建模、电机仿真、驾驶员模型、滑模控制以及模型预测控制等多个方面。"
差动转向无人车是自动驾驶技术中的一种重要形式,其核心在于利用轮毂电机独立控制每个车轮的转动,以实现灵活的转向和动力分配。论文首先在车辆动力学仿真软件Carsim中,建立了包含车身模型、动力系统、悬挂系统等在内的详细模型,并通过Matlab/Simulink构建了轮毂电机驱动的无人车仿真模型,为后续研究打下基础。
在驾驶员模型方面,研究引入了分数阶微积分理论,创建了一个分数阶单点预瞄驾驶员模型,该模型能够模拟驾驶员的驾驶行为,尤其是在路径跟踪中的表现。通过对logistic单移线路径的跟踪验证,证明了分数阶模型的有效性,确定了无人车跟踪路径所需的前轮转角及其动态响应。
接下来,论文构建了轮毂电机驱动无人车的整车动力学模型,以及前轮差动转向系统的动力学模型。采用滑模控制方法,根据差动转向车辆的实际横摆角速度与参考模型的差异,设计了前轮差动转向控制策略。经过单移线和双移线路径的仿真,证实了这种控制策略能够实现无人车的精确转向。
此外,为了进一步优化路径跟踪性能,论文还建立了差动转向无人车的动力学及运动学模型,并进行了线性化和离散化处理。通过模型预测控制,将控制问题转化为二次规划问题,确保在每个控制周期内都能找到最优的控制量和控制增量。同样,通过仿真验证,表明该模型预测控制策略能够有效使无人车通过差动转向实现路径跟踪。
本文深入研究了差动转向无人车的路径跟踪控制,涵盖了车辆建模、电机控制、驾驶员行为模拟以及先进控制策略等多个关键技术领域,为无人车的自动驾驶提供了理论和技术支持。这些研究成果不仅丰富了自动驾驶领域的理论体系,也为实际无人车系统的设计和优化提供了实践指导。关键词包括:差动转向、路径跟踪、分数阶单点预瞄驾驶员模型、滑模控制和模型预测控制。
6
似于驾驶员模型,驾驶员模型是否合理对无人车自主转向性能至关重要。我国的郭孔辉院
士团队在驾驶员最优预瞄理论方面有着深入研究
[25,26,27]
,他提出了预瞄跟随理论、最优曲
率预瞄模型,并在智能车中预瞄跟随理论部分展开了细致研究。根据不同的驾驶员行为可
把驾驶员模型分为三类,分别为补偿跟随模型、预瞄跟随模型及方向、速度综合控制模型
[28]
。补偿跟随模型由美国学者 Mc Ruer 提出,根据车辆的状态以及前方路段的信息、行驶
轨迹和预期轨迹的偏差量,进行补偿和校正,从而输出方向盘的转角来控制汽车,实现路
径跟踪控制。此模型没有体现驾驶员的预瞄作用,仅靠此刻车辆的运动状态带来的和目标
路径间的横向偏差量进行补偿校正控制,这不宜用于汽车高速行驶的情况。预瞄跟随驾驶
员模型是指驾驶员开车时所关注到的前方路径,主要包含预瞄
( )P s
、前向校正
( )F s
和反馈
预估
( )B s
环节。由于正常行驶时驾驶员的视线总是关注前方的一段目标路径,因此该模型
相比于补偿控制模型更加符合实际中驾驶员的行为特征。最早提出预瞄跟随驾驶员模型的
是名为 Kondo 的日本人,此模型名为单点预瞄驾驶员模型
[29]
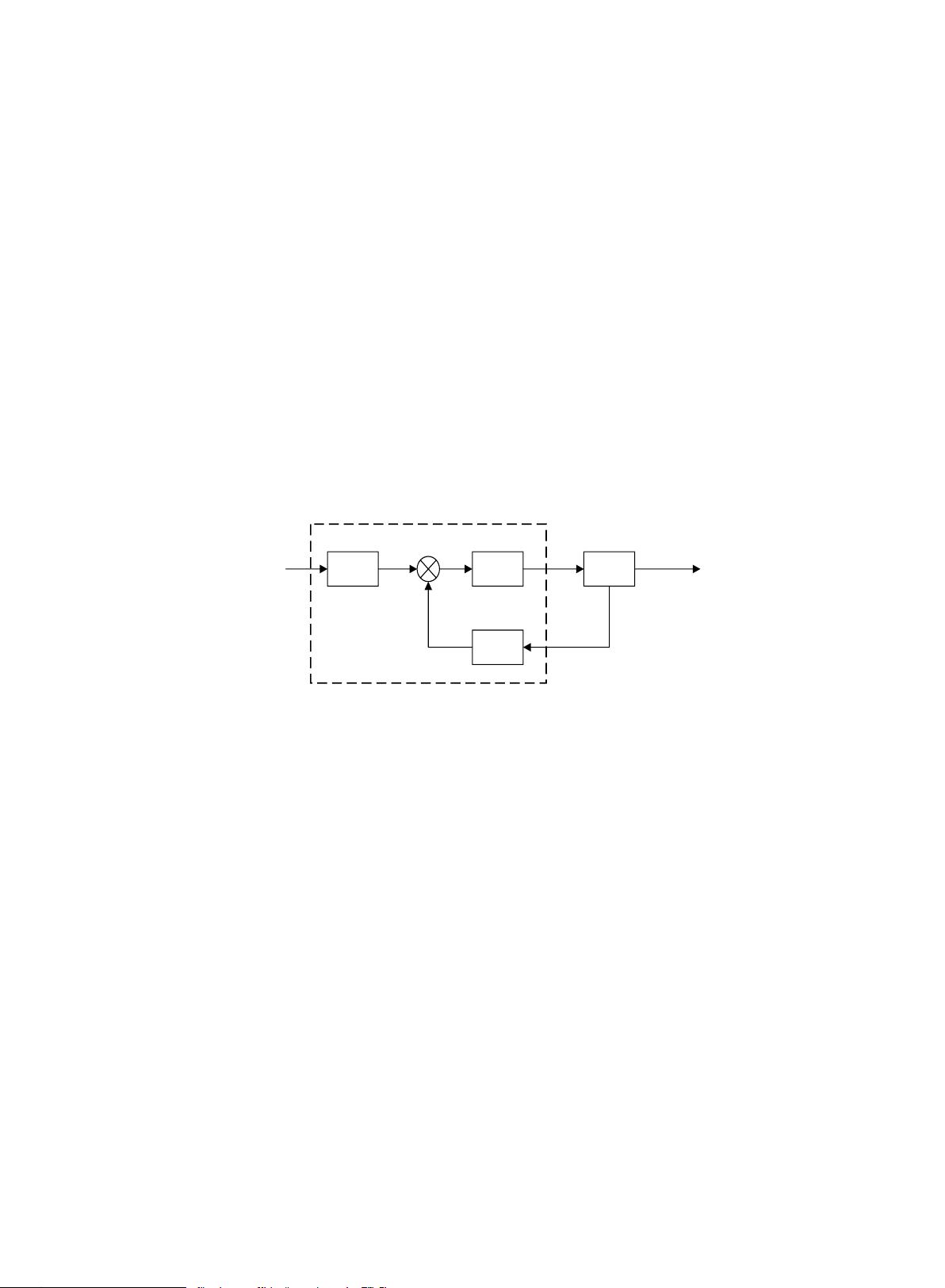
。预瞄跟随模型的结构如图 1-
7 所示。
P(s)
F(s)
汽车
B(s)
驾驶员
模型
f f
e
y
p
ε δ y
图 1-7 预瞄跟随模型
Fig.1-7 Preview following model
图 1-7 中
f
为目标路径;
e
f
为基于当前车辆的运动状态得出的下一时刻位置;
p
y
为下
一时刻的车辆预估状态;
为预估量
e
f
和
p
y
的差值;
为车辆的方向盘转角;
y
为车辆的
位置信息。大多数研究人员建立的驾驶员模型都是考虑了预瞄机制,建立在单点预瞄的基
础上。由于单点预瞄驾驶员模型视线总是关注前方的一段目标路径,因此该模型相比于补
偿控制模型更加符合实际中驾驶员的行为特征。
在单点预瞄的基础上,许多研究人员提出了两点预瞄驾驶员模型。Salvucci
[30]
提出的两
点预瞄模型包含了预瞄控制层和补偿控制层,预瞄控制层受远预瞄点影响,补偿层则受近
预瞄点影响,然后综合远近两个预瞄点的力矩增益进行方向控制。Donges
[31]
提出的两点驾
驶员转向模型被广泛认可和应用。2009 年,Sentouh
[32]
在 Donges 提出的驾驶员模型基础上,
提出了一种具有前馈预期和反馈补偿的驾驶员模型。其中前馈控制层中的控制力矩受远预
瞄点的偏差角和增益系数影响;而反馈补偿层中的力矩受近预瞄点偏差角和增益系数影响。
此两点预瞄模型比单点预瞄模型更吻合真实的驾驶员前视情况。
除此之外,还有很多科研人员进行了多点预瞄驾驶员模型的研究。杨浩等
[33]
为了符合
更多驾驶员的驾驶行为和预瞄风格,提出了一种三点预瞄的驾驶员补偿模型,分别预瞄前
方远预瞄点、远近预瞄点的中点、近预瞄点位置,判断与目标路径之间的位置关系,并结



剩余65页未读,继续阅读
相关推荐

182 浏览量




icwx_7550592
- 粉丝: 21
 我的内容管理
展开
我的内容管理
展开







最新资源
- Openaea:Unity下开源fanmad-aea游戏开发
- Eclipse中实用的Maven3插件指南
- 批量查询软件发布:轻松掌握搜索引擎下拉关键词
- 《C#技术内幕》源代码解析与学习指南
- Carmon广义切比雪夫滤波器综合与耦合矩阵分析
- C++在MFC框架下实时采集Kinect深度及彩色图像
- 代码研究员的Markdown阅读笔记解析
- 基于TCP/UDP的数据采集与端口监听系统
- 探索CDirDialog:高效的文件路径选择对话框
- PIC24单片机开发全攻略:原理与编程指南
- 实现文字焦点切换特效与滤镜滚动效果的JavaScript代码
- Flask API入门教程:快速设置与运行
- Matlab实现的说话人识别和确认系统
- 全面操作OpenFlight格式的API安装指南
- 基于C++的书店管理系统课程设计与源码解析
- Apache Tomcat 7.0.42版本压缩包发布
