FANUC机器人程序停止与恢复操作指南
版权申诉
"本文档详细介绍了FANUC机器人在执行程序过程中的停止和恢复操作,包括停止原因、停止方式、停止状态以及人为干预程序的方法。"
在FANUC机器人系统中,程序的执行可能会因为各种原因停止,这些原因可以分为两类:一是因发生报警而自动停止,二是人为主动停止。停止动作主要分为两种方式,即瞬时停止和减速后停止。瞬时停止是指机器人立即减速并迅速停止,而减速后停止则是指机器人逐步减缓速度直至完全停止。
程序的停止状态有两种:强制结束和暂停。强制结束意味着程序执行已经彻底终止,示教操作盘上会显示“ABORTED”。如果在子程序执行中强制结束主程序,子程序的返回信息将丢失。另一方面,暂停状态表示程序被暂时中断,屏幕上显示“PAUSED”,可以通过再启动操作继续执行中断的程序,即使在子程序中也是如此。
人为中止程序可以通过多种途径实现,包括按下示教操作盘、操作面板的急停按钮或Deadman开关,通过外围设备I/O的*IMSTP输入。此外,按下HOLD按钮或通过*I/O的*HOLD输入也能使程序暂停。更进一步,使用“ABORT(ALL)”选项或外围设备I/O的*CSTOPI输入可以强制结束程序。
急停是紧急情况下停止程序的一种方法,按下操作面板或示教器上的急停按钮会导致机器人瞬时停止,同时触发急停报警,伺服电源断开。恢复急停状态需要排除导致急停的原因,解锁急停按钮,然后通过示教器的RESET键消除报警。
HOLD键用于程序的减速停止,按下后程序会被中断并进入暂停状态。要恢复程序,可以直接再启动以解除暂停。如果需要强制结束程序,可以通过辅助菜单选择“ABORT(ALL)”。
总结来说,FANUC机器人在执行程序时的停止和恢复涉及多种操作和状态,用户应根据具体情况灵活运用,确保机器人系统的安全和高效运行。理解并掌握这些操作对于FANUC机器人的日常维护和故障处理至关重要。
FANUC 机器人有关执行程序的停止和恢复的说明
程序的停止,即停止执行中的程序。
程序停止的原因,有程序执行中因发生报警而偶然停止以及人为停止(包括报警的发生)。
动作中的机器人停止的方法有:
瞬时停止:机器人迅速减速后停止
减速后停止:机器人缓慢减速后停止
程序的停止状态有如下 2 种:
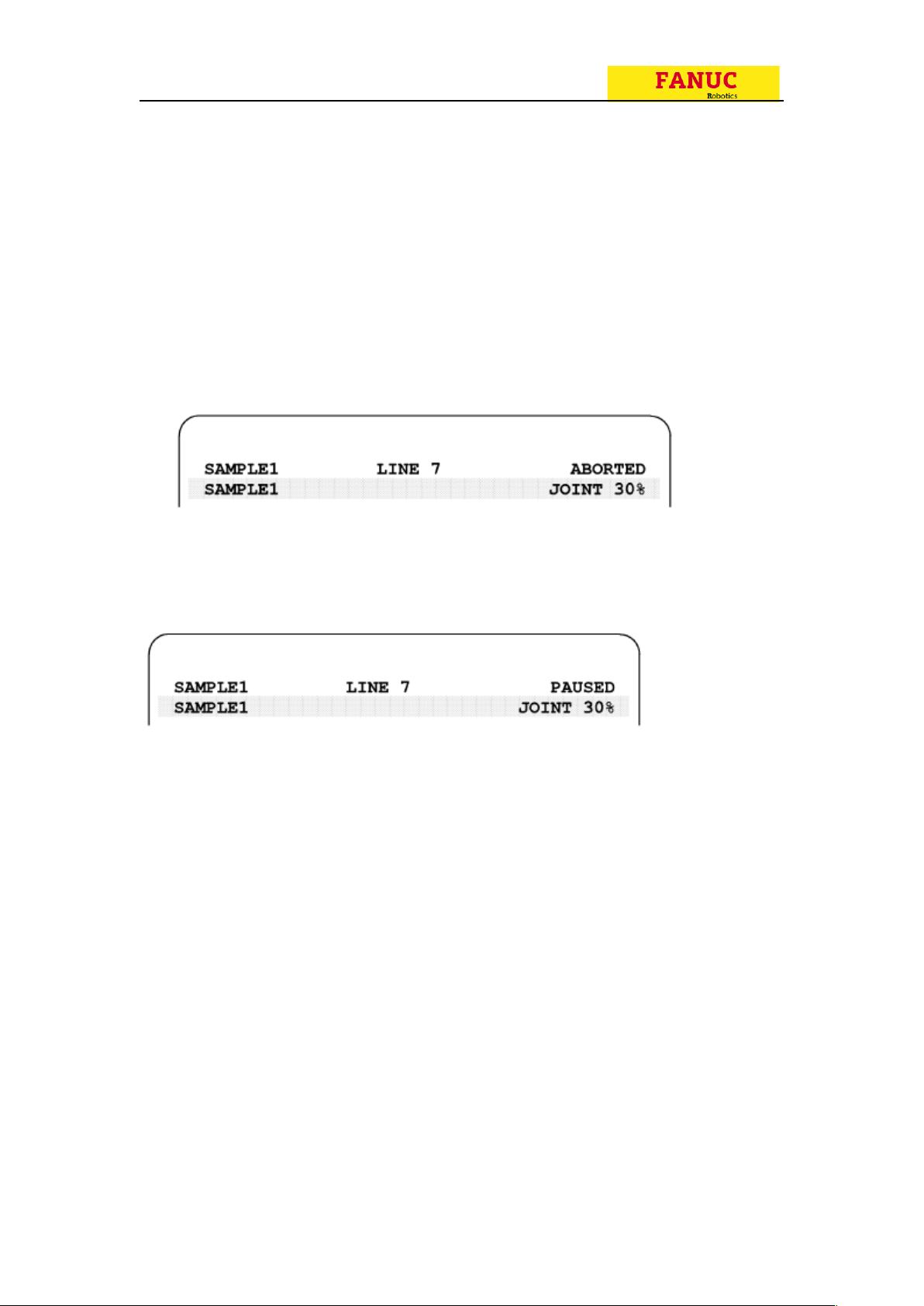
强制结束:显示程序的执行已经结束的状态。示教操作盘画面上显示“ABORTED”
(中止)
在子程序执行过程中强制结束主程序时,返回主程序的信息丢失。
暂 停 ( 中断): 表 示 程 序 的 执 行被 暂 时 中 断 的 状 态。示教 操 作 盘 画 面 上 显示
“PAUSED”(暂停)
通过再启动操作,可继续执行被中断的程序。在通过程序调用指令被调用的子程序中暂停
而再启动时,也可以返回到主程序。
希望在程序的其他行启动或启动其他程序时,需要强制中止程序,解除暂停状态。
人为中止程序的方法有如下几种:
按下示教操作盘、操作面板的急停按钮、 Deadman 开关。外围设备 I/O 的*IMSTP
输入。
按下示教操作盘、操作面板的 HOLD 按钮。外围设备 I/O 的*HOLD 输入。通过这些
操作和输入来中断程序的执行。
示教操作盘的辅助菜单“ABORT(ALL)”(中止全部)。外围设备 I/O 的*CSTOPI 输
入。通过这些选择和输入的选择,强制结束程序的执行。
1. 通过急停操作来停止和恢复程序
按下操作面板或示教器上的急停按钮,机器人瞬时停止。此时,发生急停报警。
急停时:
机器人的动作瞬时停止,暂停程序的执行
发出报警,断开伺服电源
急停的方法和步骤:
下载后可阅读完整内容,剩余4页未读,立即下载
2021-01-07 上传
2021-07-12 上传
2022-07-11 上传
2022-07-10 上传
2021-07-06 上传
2021-01-05 上传
2021-06-29 上传

AAA_自动化工程师
- 粉丝: 6936
- 资源: 3429
 我的内容管理
展开
我的内容管理
展开







最新资源
- Aspose资源包:转PDF无水印学习工具
- Go语言控制台输入输出操作教程
- 红外遥控报警器原理及应用详解下载
- 控制卷筒纸侧面位置的先进装置技术解析
- 易语言加解密例程源码详解与实践
- SpringMVC客户管理系统:Hibernate与Bootstrap集成实践
- 深入理解JavaScript Set与WeakSet的使用
- 深入解析接收存储及发送装置的广播技术方法
- zyString模块1.0源码公开-易语言编程利器
- Android记分板UI设计:SimpleScoreboard的简洁与高效
- 量子网格列设置存储组件:开源解决方案
- 全面技术源码合集:CcVita Php Check v1.1
- 中军创易语言抢购软件:付款功能解析
- Python手动实现图像滤波教程
- MATLAB源代码实现基于DFT的量子传输分析
- 开源程序Hukoch.exe:简化食谱管理与导入功能
