FPGA实现二值图像边界检测算法
133 浏览量
更新于2024-09-03
1
收藏 283KB PDF 举报
本文主要介绍了如何在FPGA中实现二值图像的边界提取算法,通过3x3模板进行边缘检测,适用于单片机与FPGA交互的图像处理场景。
二值图像边界提取是图像处理中的基础操作,它用于识别图像中的物体轮廓。在图像处理领域,二值图像通常由黑白两种像素组成,其中白色像素代表物体,黑色像素代表背景。在给定的描述中,算法使用3x3的模板(也称为滤波器或结构元素)在图像上滑动,来检测像素的边界。
边界提取算法的工作原理如下:
1. 当3x3模板覆盖的9个像素全部为白色(即值为'1')时,认为该位置可能存在边界,因为所有相邻像素都是物体,输出也为'1'。
2. 同样,如果9个像素全为黑色('0'),则认为可能是边界,输出同样为'1'。这是因为在这种情况下,整个区域可能是背景,而边界可能位于模板的外围。
3. 在其他情况下,即模板中包含黑白混合的像素,输出设为'0',这表示这些位置不是边界。
在FPGA实现中,边界提取算法通常由硬件逻辑电路执行,以实现快速高效的处理。给定的FPGA源码模块`boundary_extraction`接收图像数据流,包括像素时钟`clk`、复位信号`rst_n`、水平同步信号`hs_in`、垂直同步信号`vs_in`以及16位的像素数据`data_in`。此外,还有输入数据有效标志`data_in_en`和相应的输出信号。模块会计算并输出处理后的图像数据到`data_out`,同时提供输出数据有效标志`data_out_en`,以便下游系统知道何时接收数据。
在FPGA内部,这个模块可能会采用并行处理的方式,对每个像素位置应用边界检测规则,生成新的二值图像。时钟信号`clk`控制着数据处理的同步,`rst_n`用于在系统启动时复位状态机,而`hs_in`和`vs_in`则用于同步图像帧的开始和结束。
实现时,可以采用查找表(LUT,Look-Up Table)或状态机来存储和执行边界检测规则。对于3x3模板,每个像素位置需要检查9个相邻像素,这意味着需要9次读取和比较操作。在FPGA中,这些操作可以并行化,从而显著提高处理速度。
FPGA实现的二值图像边界提取算法是一种高效的方法,尤其适用于实时或嵌入式系统,它能够快速地识别和输出图像的边缘信息,为后续的图像分析和处理步骤提供基础。
FPGA二值图像边界提取算法实现二值图像边界提取算法实现
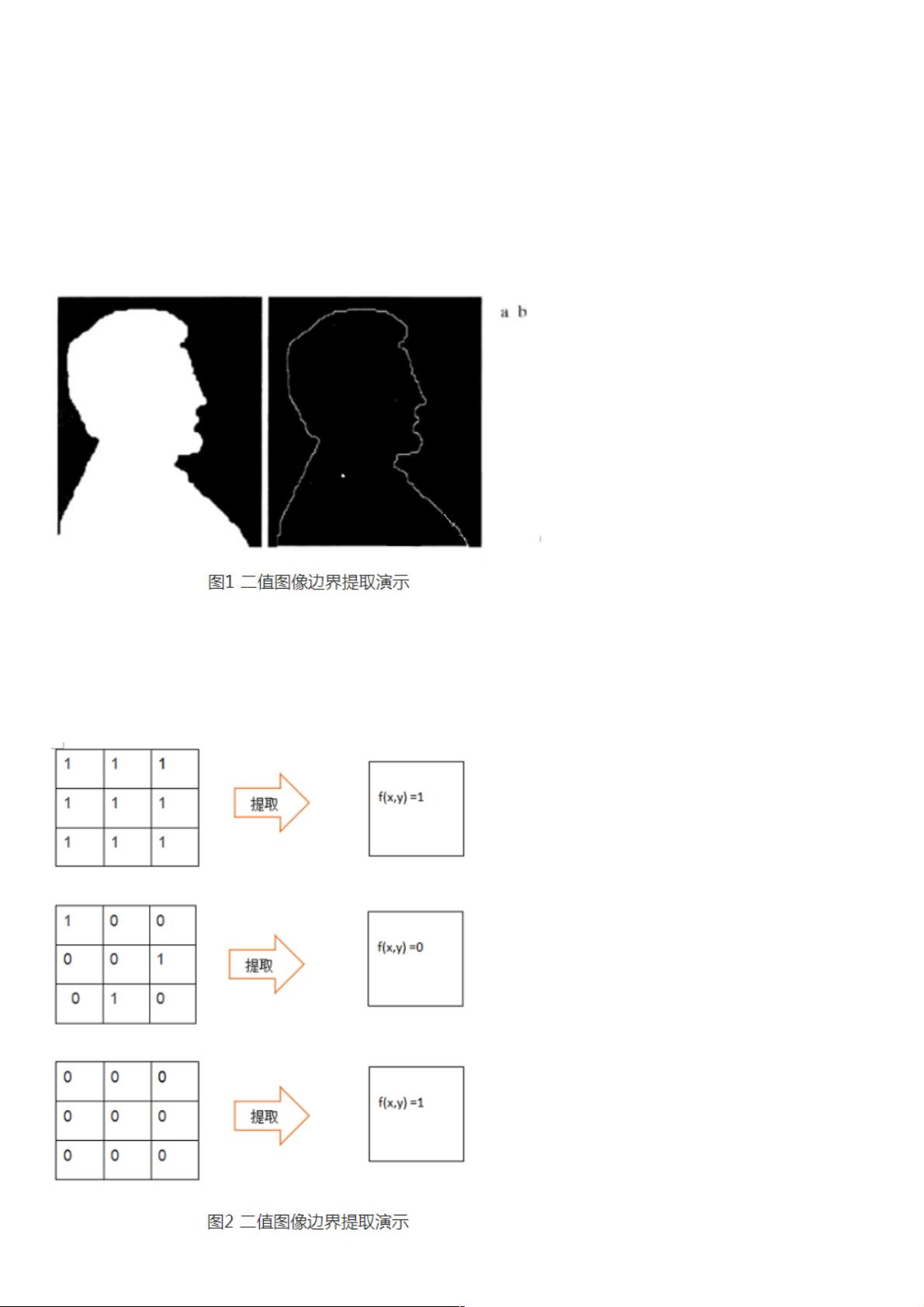
1 背景知识 图1 二值图像边界提取演示 如图1 所示,图1 a为一幅简单的二值图像,经过边界提取后形成如图1 b
所示的图像,显示出了白色区域的轮廓。 2 边界提取算法 使用黑色提取,背景为白色,‘1’表示白色,‘0’表示黑
色。 图2 二值图像边界提取演示 我们使用3x3模板进行边界提取,所以当3x3九个点都是‘1’的时候,输出为‘1’,
当九个点都是‘0’的时候,输出为‘1’,其他情况输出均为‘0’。 3 FPGA二值图像边界提取算法实现 图2中我们使用
串口传图传入的是二值图像。FPGA源码:/*Module name: boundary_extracTIon.vDescripTIon: binary image
boundary extracTIon*/`TImescale 1ns/1psmodule boundary_extraction( input clk, //pixel clkinput rst_n,input
hs_in,input vs_in,input [15:0] data_in,input
1 背景知识
图1 二值图像边界提取演示
如图1 所示,图1 a为一幅简单的二值图像,经过边界提取后形成如图1 b 所示的图像,显示出了白色区域的轮廓。
2 边界提取算法
使用黑色提取,背景为白色,‘1’表示白色,‘0’表示黑色。
下载后可阅读完整内容,剩余5页未读,立即下载
639 浏览量
点击了解资源详情
点击了解资源详情
2023-11-10 上传
153 浏览量
2023-03-13 上传
2010-08-16 上传
2022-10-25 上传
383 浏览量

weixin_38600460
- 粉丝: 5
 我的内容管理
展开
我的内容管理
展开







最新资源
- 整合营销力量:CRX插件的推广与优化
- 电子科技大学概率论与数理统计优质课件分享
- jQuery手风琴图片滑动展示特效教程与下载
- 机器学习训练数据包:LineSVC与HOG结合手写识别
- VB中创建Code 39条形码的教程与代码示例
- 易语言实现的学校智能排课系统源码
- 深入解析Spring AOP编程技术及应用实例
- 鼠标颜色提取器:便捷获取颜色编码绿色版
- 多功能图标管理工具发布,操作简便效率高
- DaebWxHook:安全操作微信接口及关键文件介绍
- netMEDIA-crx插件:一站式招聘候选人来源
- 电子商务布局设计与响应式尺寸规范指南
- Git 2.25.1与TortoiseGit 2.2.0.0官方64位版安装指南
- 2017年张志君SpringBoot视频教程完整资料整理
- PowerCLI脚本库:自动化虚拟环境管理
- Adobe官方配色神器Kuler插件深度解析
