




"足球机器人决策子系统研究及MATLAB仿真"
版权申诉
本文以MiroSot机器人足球比赛为背景,以集控式微型足球机器人为研究对象,重点研究了足球机器人系统的决策子系统。足球机器人作为当前机器人研究中的热点,涉及机器人学、人工智能、智能控制、计算机视觉等多个领域。作为一个典型的多智能体协作系统,足球机器人系统为机器人学、多智能体系统理论研究和技术应用提供了一个理想的实验平台。
首先,本文对足球机器人系统的结构进行了分析,然后针对足球机器人问题的特点进行了研究。针对传统的决策系统设计思想,本文分析了常用的决策模型的优缺点,并提出了采用一种自上而下的分层递阶策略模型。通过这种策略模型,可以更好地实现足球机器人的智能决策,并提高其整体的协作性能。
在机器人的路径规划方面,本文建立了差动轮式足球机器人的运动学和动力学模型,并提出了一种基于栅格建模的遗传算法路径规划与模糊PID运动控制方法。这种方法不仅可以有效地规划机器人的路径,还可以通过模糊PID控制方法实现机器人的精确运动控制,从而提高其在比赛中的表现和竞争力。
决策系统中的策略知识库是决策的重要组成部分,本文研究了策略知识库中策略的设计方法,采用以球为中心的区域控制法,设计了足球机器人的进攻策略与防守策略等。通过这种策略知识库的设计,可以使机器人在不同情况下做出更加合理和有效的决策,提高比赛中的表现。
最后,本文进行了系统的仿真实验,对足球机器人的决策子系统进行了验证和评估。通过仿真实验的结果,可以证明本文提出的决策子系统设计方法的有效性,并为足球机器人的实际应用提供了理论支持。
综上所述,本文通过针对足球机器人系统的决策子系统进行深入研究,提出了一种自上而下的分层递阶策略模型,并结合遗传算法路径规划与模糊PID运动控制方法,以及以球为中心的区域控制法,设计了足球机器人的决策系统。通过系统的仿真实验,验证了该系统的有效性,并为足球机器人的进一步研究和应用提供了新的思路和方法。
第 11 页
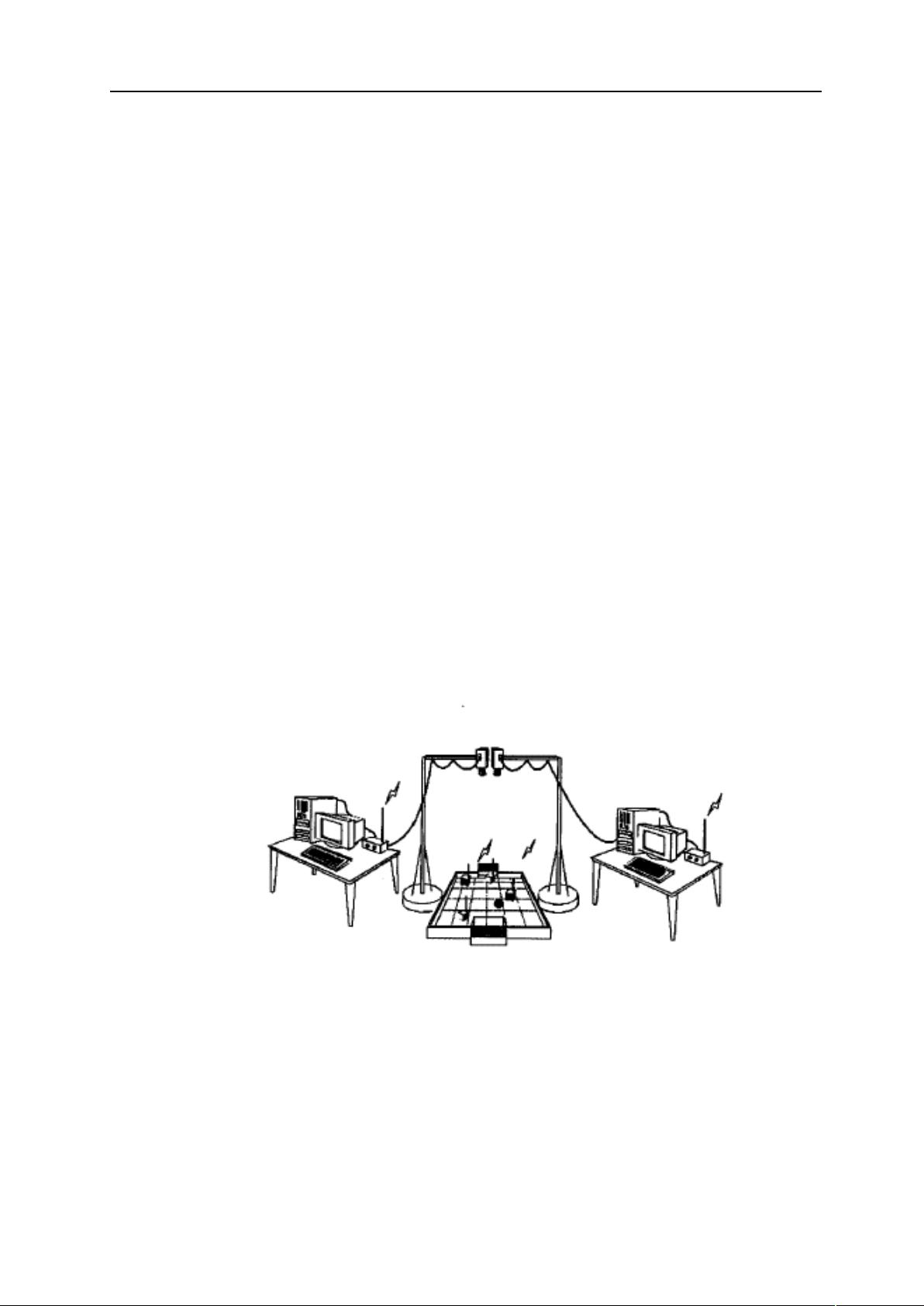
制足球机器人系统(vision-base Brain on board soccer robot system)”。在这
种系统中,采用全局视觉且只有全局视觉数据处理在主计算机上完成,然
后把处理结果发给场上每个机器人,机器人自己据此做出策略决策,进行
运动控制机器人具有速度控制、位置控制、自动避障等功能,在RoboCup
的小型机器人赛(F180)常采用这种模式。
图2.2 基于视觉的半自主型足球机器人系统示意图
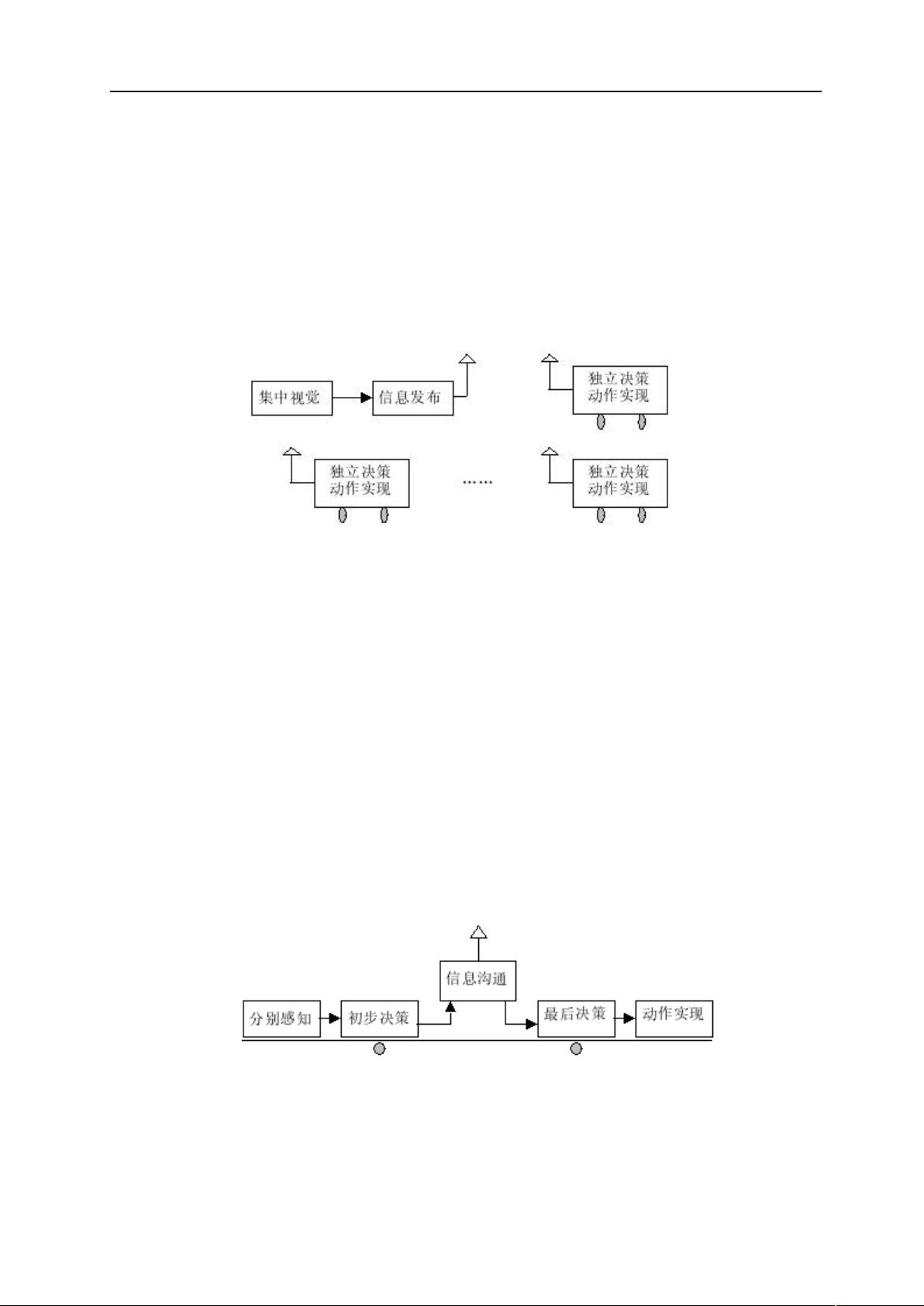
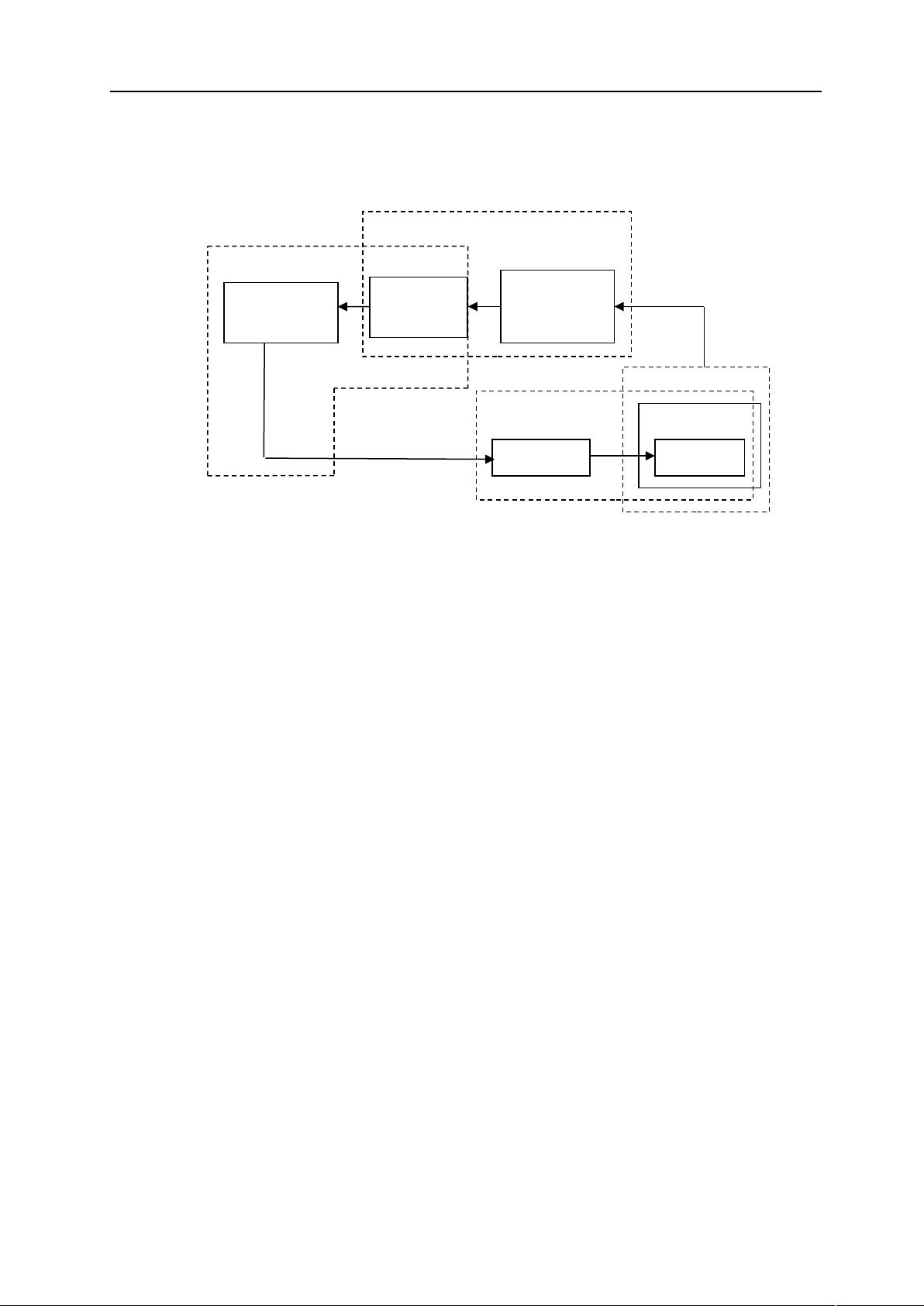
3.全自主型足球机器人系统,又称“基于机器人的足球机器人系统(Robot-
base soccer robot system)”。如图 2.3所示,机器人具有完全的自主行为,
自身具有感知系统,一般装有多种传感器,所有的计算(传感信息处理、
决策)都由机器人自身来完成。各个机器人分别感知,感知器官不仅局限
于视觉,还可辅以红外和声纳等,进行距离和障碍检测。这样信息融合成
为首当其冲的技术难题;机器人间的信息沟通则要靠无线通信网络;网络
形式与通信协议也成为制约系统性能的关键技术。RoboCup的中型足球机
器人比赛(F2000),和四足机器狗比赛( Sony Legged League)及人形足
球机器人比赛(Humanoid)就属于此类系统。
图2-3 全自主型足球机器人系统示意图
以上三种模式的系统,从智能的角度讲,第一、二、三种模式呈递增
趋势,从控制方式来看,第三种属于分布式控制,第一、二种属于集中控
剩余63页未读,继续阅读
相关推荐





omyligaga
- 粉丝: 102
 我的内容管理
展开
我的内容管理
展开








最新资源
- PHP开源影视系统PPVOD v2.0 Beta2发布
- ArcGIS Engine实现最优路径分析的方法
- Java实现自行车商店网站桌面客户端的Web服务更新
- AES加密算法在MATLAB中的实现与原理
- Android开发入门:贪吃蛇游戏实战教程
- Voxler4汉化范例文件:12个中文版样本文件介绍
- 深入分析XML解析技术:dom、sax与dom4j
- Delphi编程中控制Win32应用实例数量的MaxInst控件
- VC++图像编程实例:图像处理与动画效果教程
- UEFI BIOS Updater:简易AMI BIOS改装工具使用指南
- Neo4j实现跨品牌车辆搜索系统原型
- 自动删除Oracle过期归档日志的计划任务设置
- libjpeg库深度应用:实现图片压缩而不失真
- 3Dmax2009至Quest3D4.2.3的cgr文件导出插件发布
- 0.5mm间距TQFP器件手工焊接全攻略
- QQ灌水机源代码解析与使用指南






















