基于单片机的直流电机转速PID控制设计详解
需积分: 9 181 浏览量
更新于2024-07-01
收藏 630KB DOC 举报
本文档详细介绍了基于单片机的直流电机转速PID控制系统的设计,旨在实现对电机转速的精确控制和实时显示。设计主要包括以下几个关键部分:
1. 直流电机选型与工作原理:
学员需选择一款直流电机,并深入理解其工作原理,包括电磁场作用、电枢绕组和换向器等结构如何协同工作,以及转速与输入电流的关系。
2. PID控制原理:
PID(比例-积分-微分)控制器是核心部分,用于根据设定的转速目标和实际转速的偏差,自动调整电机驱动信号,以达到稳态精度±5r/min的要求。PID控制方框图展示了整个控制系统的逻辑流程。
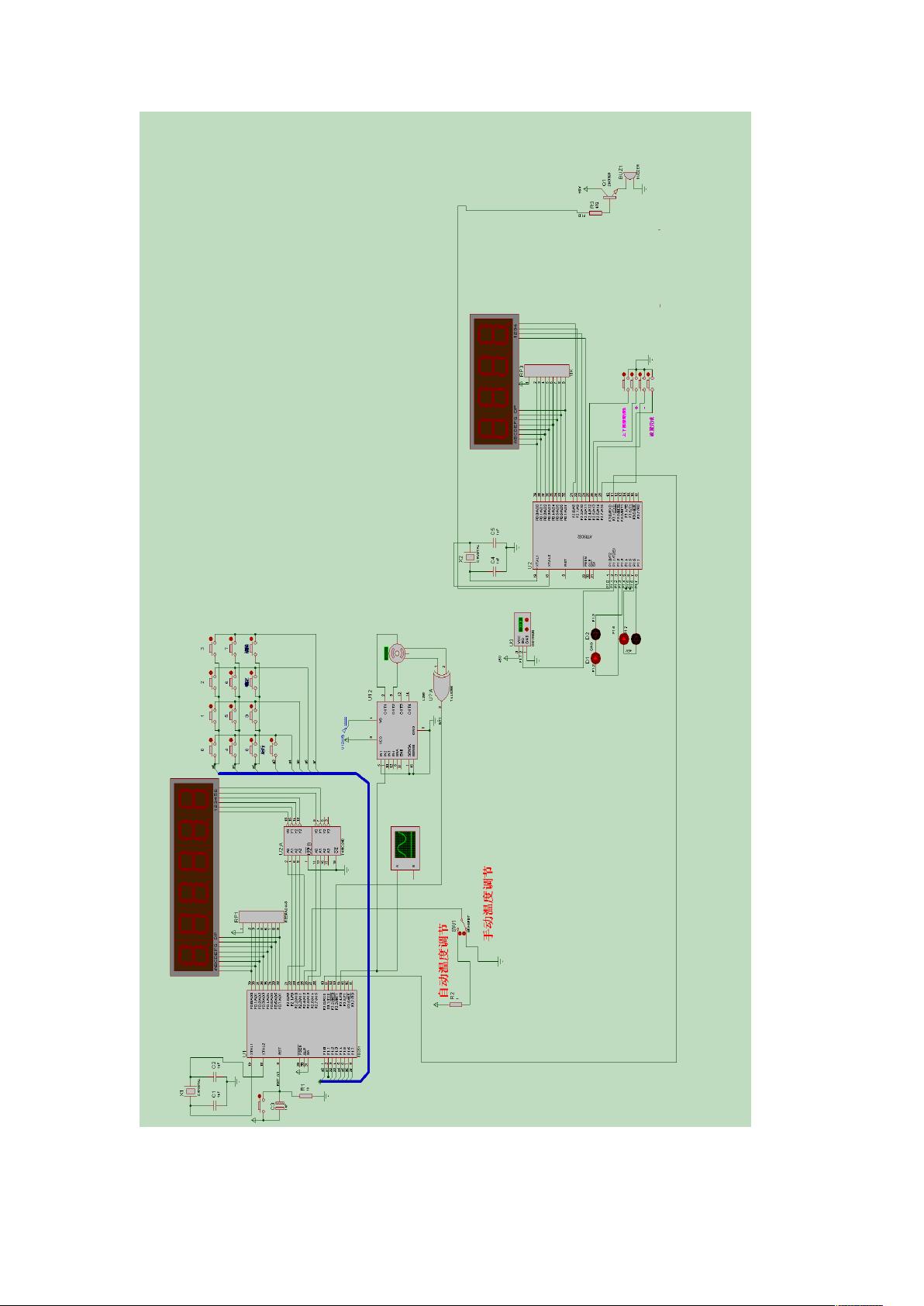
3. 硬件设计:
硬件设计包含PID控制电路、复位电路、键盘输入、显示电路、串行通信电路和温度检测模块。PID控制电路负责调节电机,复位电路确保单片机初始化,键盘用于用户交互,DS18B20用于实时监测电机运行环境温度。
4. 软件设计:
软件设计流程图展示程序执行顺序,包括直流电机控制子程序,使用定时器0进行定时计算,以及温度检测子程序。外部中断INT1用于捕捉电机转速变化,一号单片机利用定时器1生成串行通信所需的波特率。
5. 调试与运行结果:
设计完成后,学员需要通过实际操作进行系统调试,验证PID控制的效果,确保电机能在指定的转速范围内稳定运行,并记录运行结果,如实际转速与设定值的比较。
6. 课程设计体会:
通过这次设计,学生将加深对单片机工作原理、硬件设计和控制理论的理解,同时锻炼了实践能力和问题解决能力。
在整个设计过程中,参考了《单片机原理与接口技术》和《单片机微型计算机原理与接口技术》两本书籍,为设计提供了理论基础。
这份文档提供了一个完整的设计过程,涵盖了从硬件选择到软件编程,再到系统测试的各个环节,是学习和研究单片机控制技术的一个实用案例。
7 / 39
图 2.2 电路连接图

剩余38页未读,继续阅读
270 浏览量
144 浏览量
109 浏览量
2023-07-01 上传
2023-07-01 上传
2022-06-20 上传
2023-07-01 上传

智慧安全方案
- 粉丝: 3844
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- jspm-sample.tk:示例 jspm 应用程序 - 使用 angular 开发到生产流程
- 解析玩具:解析玩具
- 理财管理信息系统.rar
- Tampermonkey-Scripts
- 外语培训机构信息网页模板
- spideForm:动态HTML 5画布,用于创建显示表单的图形
- e-indicacao-fe
- StereoCorrespondenceGC:使用图切割技术实现立体对应
- parameterized-reporting-presentation
- TrackerUI
- ReactTemplate.zip
- 小度wifi、360wifi、MiWifi、wifibao_MacOS-15可用.zip
- replaceall:替换 JavaScript 字符串中的所有实例
- 扇贝学习工具-crx插件
- Base32-Module:用于与Base10相互转换的Base32Module
- hss-urlmeme:轻松将图像发布到HSS聊天室
