单片机超声波测距系统设计与驱动详解
需积分: 5 62 浏览量
更新于2024-07-01
收藏 335KB DOC 举报
本设计书详细介绍了如何利用单片机技术设计一个超声波测距系统,以实现移动机器人的避障功能。该系统主要包括以下几个部分:
1. **概述**:
- 超声波测距原理基于声波的反射和传播时间差,通过发送超声波脉冲,测量发射信号到接收到反射信号的时间,从而计算出目标物体与传感器的距离。这与雷达测距原理相似,但超声波具有指向性强、传播距离远的优点,适合于实时、精确的测量。
2. **超声波测距模块**:
- 设计中包含了超声波发射器、接收器以及相应的驱动电路。驱动线路图展示了模块的连接方式,控制时序图则展示了启动模块的程序逻辑,例如通过连续的空操作 `_nop_()` 来控制发射和接收信号的时间。
- 实物图展示了一个具体的超声波模块,它包括发射和接收电路,以及可能的延时控制元件。
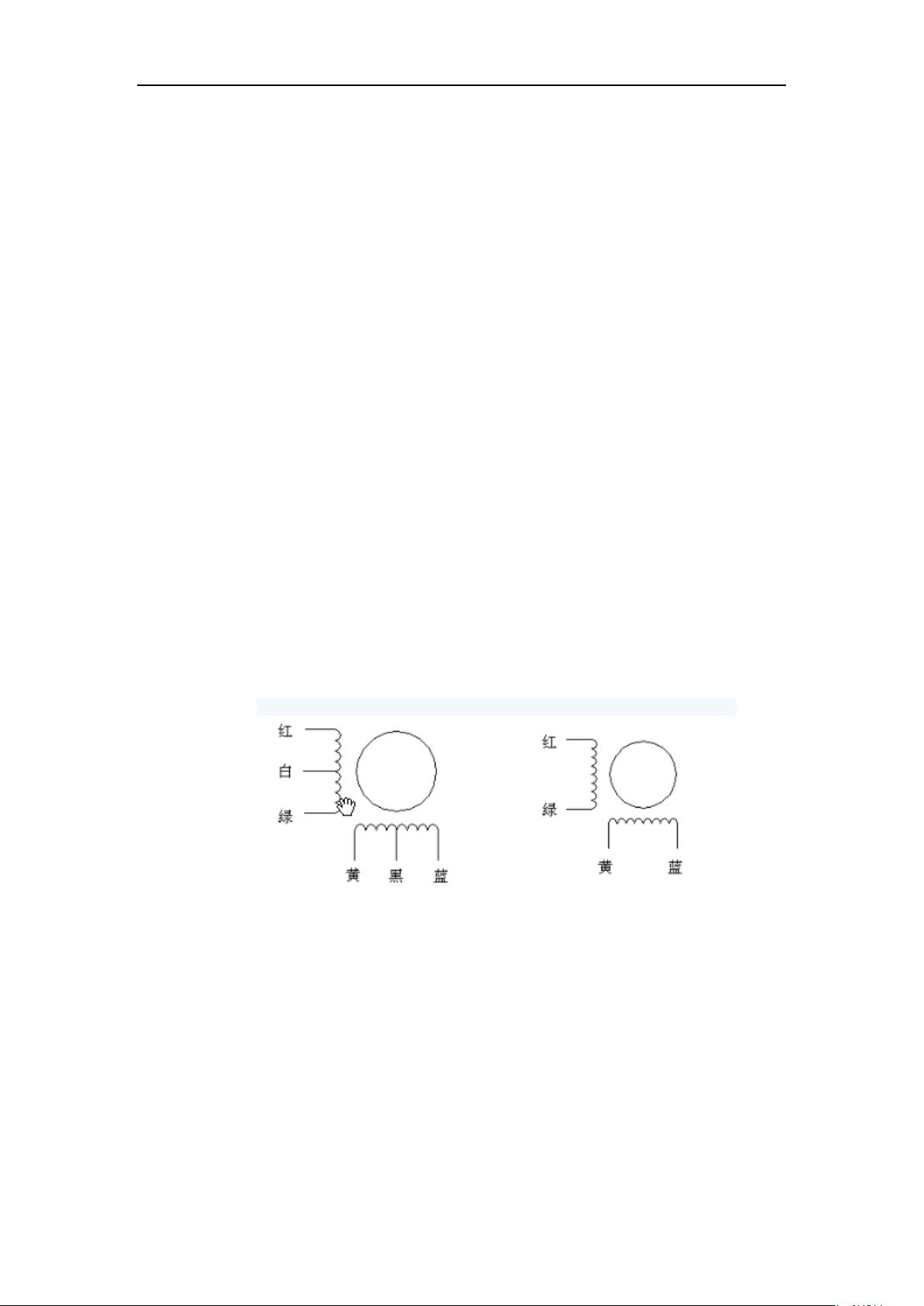
3. **步进电机驱动模块**:
- 为了实现机器人的移动,设计还涉及步进电机的驱动。采用了2相6线步进电机驱动方式,通过L298N驱动芯片来控制电机的转动。驱动芯片原理图展示了芯片内部的工作原理,实物图则展现了芯片的外观和实际应用。
4. **12864液晶显示模块**:
- 显示模块用于将测距结果以数字形式呈现给用户或机器人控制系统。读字节和写字节时序图展示了数据交互的时机和流程,确保了清晰准确的信息显示。
5. **报警设置**:
- 在设计中,还包括了对测量结果的处理和警报设置,当检测到特定距离阈值时,可能会触发警告信号,以便及时调整机器人的行动策略。
6. **程序设计**:
- 程序部分详细描述了超声波测距模块、步进电机以及其他模块的启动、控制和数据处理流程,确保整个系统的稳定运行。
7. **总结**:
- 该设计书不仅阐述了理论原理,还提供了实际硬件布局和编程实现,为移动机器人实现自主避障功能提供了完整的技术方案。通过结合超声波测距、步进电机控制和液晶显示,设计出了一套高效、精确且易于维护的测距系统。
这个单片机超声波测距设计书涵盖了从原理到实践的各个环节,为读者提供了一个完整的机器人避障系统开发框架。
. . .
4 / 20
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
TX=0;
}
超声波实物图
3、步进电机驱动模块
4
2 相 6 线步进电机驱动方式
剩余19页未读,继续阅读
2023-02-27 上传
2021-09-15 上传
2021-10-02 上传
2022-07-08 上传
2021-10-10 上传
2022-11-29 上传
2022-05-31 上传

智慧安全方案
- 粉丝: 3802
- 资源: 59万+
 我的内容管理
展开
我的内容管理
展开







最新资源
- IEEE 14总线系统Simulink模型开发指南与案例研究
- STLinkV2.J16.S4固件更新与应用指南
- Java并发处理的实用示例分析
- Linux下简化部署与日志查看的Shell脚本工具
- Maven增量编译技术详解及应用示例
- MyEclipse 2021.5.24a最新版本发布
- Indore探索前端代码库使用指南与开发环境搭建
- 电子技术基础数字部分PPT课件第六版康华光
- MySQL 8.0.25版本可视化安装包详细介绍
- 易语言实现主流搜索引擎快速集成
- 使用asyncio-sse包装器实现服务器事件推送简易指南
- Java高级开发工程师面试要点总结
- R语言项目ClearningData-Proj1的数据处理
- VFP成本费用计算系统源码及论文全面解析
- Qt5与C++打造书籍管理系统教程
- React 应用入门:开发、测试及生产部署教程
