Matlab模糊控制工具箱教程:四步打造模糊控制器
版权申诉
108 浏览量
更新于2024-08-10
收藏 277KB DOC 举报
"4步教你学会使用matlab模糊控制工具箱"
Matlab模糊控制工具箱是设计和实现模糊逻辑控制器的强大工具,它简化了模糊控制器的创建过程,无需深入理解复杂的模糊化、模糊推理和反模糊化算法。通过4个主要步骤,用户可以快速构建和修改模糊控制器。
1. **确定模糊控制器结构**:
在设计模糊控制器时,首先要明确其结构。通常,这涉及到定义输入和输出变量。在这个例子中,输入是误差(e)和误差变化(ec),输出是控制量(u)。工具箱提供了增加或修改变量的功能,以适应不同控制系统的需求。二维控制结构适用于这种双输入单输出的控制问题。
2. **输入输出变量的模糊化**:
模糊化是将精确的数值转换为模糊集合的过程。选择合适的语言变量,如{NB, NM, NS, ZO, PS, PM, PB},这些代表了不同的模糊区间。接着,设置每个变量的论域,例如{-3, -2, -1, 0, 1, 2, 3}。然后,为每个变量选择或定义对应的隶属度函数,这可以在MemberFunctionEdit窗口中完成。用户可以自定义论域范围,添加不同数量的隶属函数,并调整它们的形状以满足设计需求。
3. **模糊推理决策算法设计**:
模糊推理是根据预先设定的模糊规则进行的。这些规则通常基于专家的经验或已有的控制策略。对于给定的输入模糊集,可以建立一个模糊控制规则矩阵,比如49条规则。模糊推理过程就是将输入映射到相应的输出,依据规则库进行模糊逻辑操作,最后得出模糊输出。
4. **输出模糊量的解模糊**:
模糊控制器的输出是模糊集,需要通过反模糊化来得出精确的控制信号。反模糊化方法通常涉及最大隶属度原则或其他算法,将模糊输出转换为单一的精确值,以便实际应用到控制系统中。
在Matlab中,模糊控制工具箱提供了图形用户界面,使得用户能够直观地进行这些步骤,大大降低了模糊逻辑系统的开发难度。通过不断的调整和优化,设计师可以创建出满足特定控制需求的高效模糊控制器。
4 步教你学会使用 matlab 模糊控制工具箱
Matlab 模糊控制工具箱为模糊控制器的设计提供了一种非常便捷的途径,通过
它我们不需要进行复杂的模糊化、模糊推理及反模糊化运算,只需要设定相应参数,
就可以很快得到我们所需要的控制器,而且修改也非常方便。下面将根据模糊控制
器设计步骤,一步步利用 Matlab 工具箱设计模糊控制器。
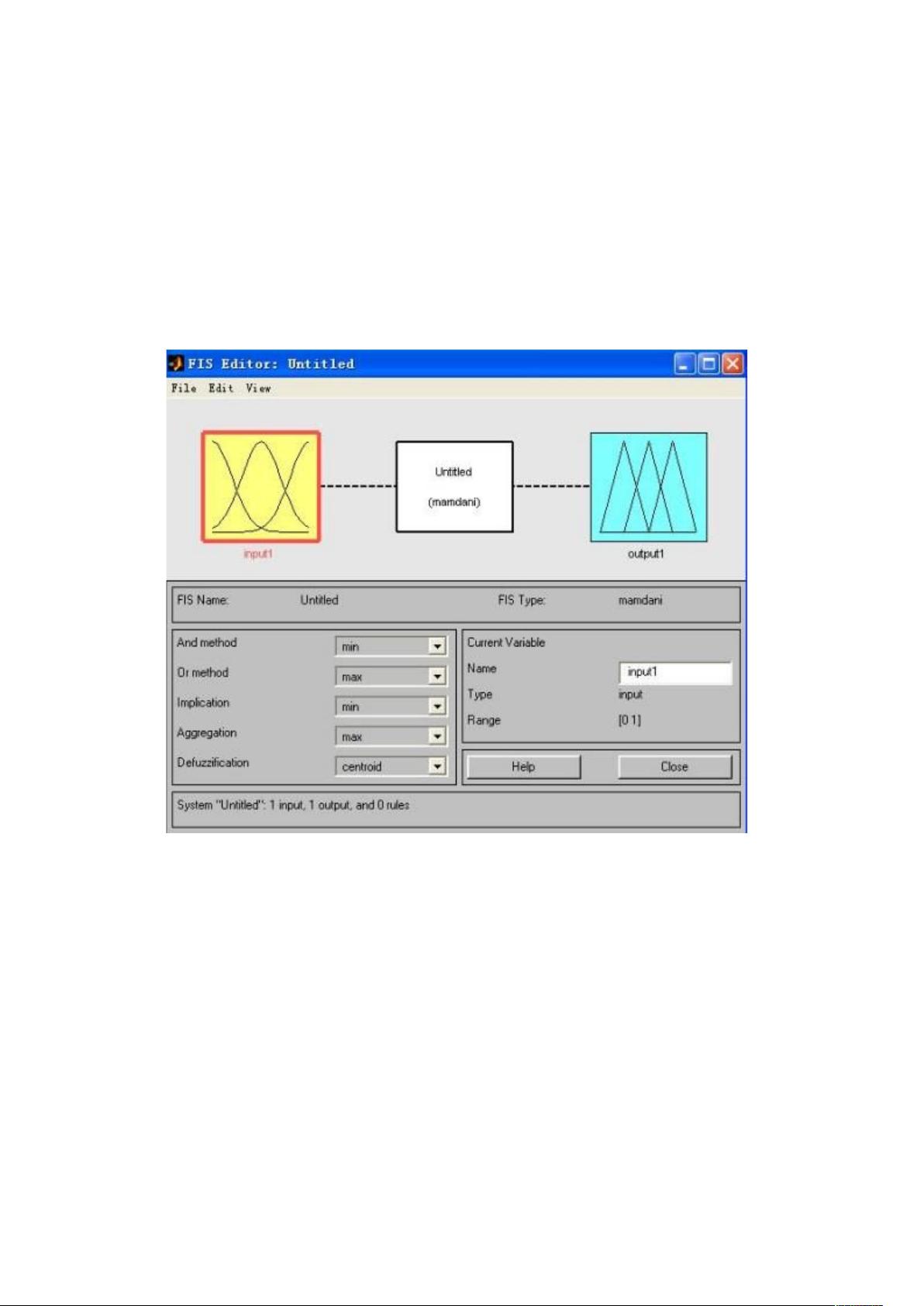
首先我们在 Matlab 的命令窗口(command window)中输入 fuzzy,回车
就会出来这样一个窗口。
下面我们都是在这样一个窗口中进行模糊控制器的设计。
1.确定模糊控制器结构:即根据具体的系统确定输入、输出量。
这里我们可以选取标准的二维控制结构,即输入为误差 e 和误差变化 ec,输
出为控制量 u。注意这里的变量还都是精确量。相应的模糊量为 E,EC 和 U,我们
可以选择增加输入(Add Variable)来实现双入单出控制结构。
下载后可阅读完整内容,剩余6页未读,立即下载
2022-11-27 上传
2022-11-27 上传
159 浏览量
1283 浏览量
1803 浏览量
762 浏览量
2021-10-04 上传
2021-10-10 上传
点击了解资源详情

爱吃苹果的Jemmy
- 粉丝: 85
- 资源: 1134
 我的内容管理
展开
我的内容管理
展开







最新资源
- 抄算组抄表员考核内容和评分标准XLS
- jdk-11.0.10.zip
- pytorch-blockswap:块交换代码(ICLR 2020)
- algorithm
- Keras数据集.7z
- 360炫酷网址导航
- 公司设计管理专职行为规范考评表
- ab并发测试及说明.rar
- 贷款还款预测
- movie_app:React JS基础课程(2021更新)
- PyctureStream:使用Kafka,Spark Streaming和TensorFlow进行图像处理的PoC
- torch_cluster-1.5.6-cp38-cp38-linux_x86_64whl.zip
- Lowrate Screen Sharing-crx插件
- autocomplete:轻松查找英语词典中的单词
- 奥克斯企业文化全案剖析DOC
- CS50x的从零开始的迷宫式革命
