电厂热工系统智能控制:新算法与应用改进
版权申诉
145 浏览量
更新于2024-07-02
收藏 3.62MB PDF 举报
本篇论文深入探讨了"人工智人-家居设计"领域中电厂热工系统建模与先进智能控制的应用研究。论文聚焦于当前传统DMC(Direct Matrix Control)算法在复杂家居环境及电厂热工系统中的局限性。作者分析了为何原始DMC算法不适用于这些对象,并提出了一种创新的方法,通过转换Shirring矩阵的形式,扩展了其应用范围。与非自调节过程中的其他算法相比,提出的算法在实践性上有所增强。
通过模拟和实际电厂锅炉水平系统的应用验证,该算法的有效性得到了证实。论文着重介绍了一种新的Smith预测器设计,它结合了模糊自调谐和基于Matlab反馈自动调谐技术,旨在解决传统Smith预测器手动调整困难且对过程参数变化敏感的问题。新系统在多种典型热力发电厂锅炉复杂控制系统下的仿真模型上进行了测试,结果显示其在控制性能上显著优于传统系统,特别是在处理存在死时滞和高阶过程时表现出优越性。
这一创新性方案不仅适用于那些死时滞显著的过程,而且对于高阶动态系统也展现出强大的适应性。整体而言,这篇论文不仅提供了对人工智能在家居设计中的新视角,还为提高工业过程控制的智能化和自动化水平提供了实用的策略和技术支持。通过这一研究,我们看到了人工智能如何在提升能源效率和用户体验方面发挥关键作用,以及未来可能引领的家居和能源行业的变革。
,一一第一章火电机衄l杂热工曩麓控似与建模应用研竞的生晨与晨曩博士后出站报告
精深和强大功能的计算,设计要具备完备的对象频率特性信息以及线性模型。
鲁棒控制理论为我们提供了系统化设计模型不确定对象最佳控制嚣的理论框架,揭示了用一范
数度量系统性能比传统的2范数(ISE)更接近于实际需要的规律t因而比基于精确数学模型的现代
控制理论更适合于实际应用。但就目前鲁棒控制设计方法在动力机组控制系统中的研究状况来看,
还存在以下的问题需要解决:(1)鲁棒控制设计方法虽是针对对象模型不确定性提出来的.但设计
仍需要控制对象的相对准确的数学模型,并且模型中应包括对象建模中存在的非结构不确定性甚至
结构不确定性的详细描述.以减少设计的保守性:(2)设计由于考虑了模型的不确定性,所以得到
的控制器的结构和阶次依赖于控制对象的结构和阶次,复杂的控制对象就会导致控制器具有过高的
阶次。因此实际应用时需要考虑模型或控制器的降阶和简化。(3)LQG/LTR方法设计的控制器常需
要过高的增益,因而达到同样的控制效果需要较大的控制输入,这容易使控制量产生饱和进而影响
控制质量;p综合方法可以利用结构奇异值(SSV)得到保守性较小的设计.但这个过程有两个缺
点:一是SSV的计算比较繁琐,二是得到的结论不是用具有工程意义的系统灵敏度函数和余灵敏度
函数的简单函数来表示的;(4)鲁棒控制设计方法不能直接完成时滞对象的控制器设计。
尽管控制系统理论已获得长足的发展,先进控制方案实际应用于火电动力机组的实例仍非常少
见。这在很大程度上归因于先进控制方案在l}I下实际要求条件下难以保证机组运行良好:实时性能、
大范围运行能力、高维和复杂过程动态,或者因为这些方案成立的假设条件例如高斯分布型噪声、
固定不变的过程参数、正确且精确的测量以及过程动态的充分了解等在实际中难以满足。
大多数先进控制方法的主要缺陷在于要求用于设计和运行的系统数学模型必须精确.而动力机
组的高维和复杂性使得基于全工况精确数学模型的集中控制方案难以实现。另一方面这种情况也造
成了大多数机组至今仍在继续沿用基于PID算法的多回路分散控制方案的局面。
1.3.3智能控制方法与应用研究现状
电厂控制的复杂控制目标和任务以及控制对象动态特性的不确定性、非线性等特征.使得传统
的基于对象精确数学模型的控制方法的应用受到限制。就在常规控制理论面临复杂生产过程的挑战
的时候,人们在工程实殴中发现这些复杂过程却可出熟练的擐作人员通过在实践中不断学习、积累
经验而达到有效的控制,这使人们逐渐意识到在传统控制中加入逻辑推理和启发式知识的重要性。
与此同时人工智能由于计算机科学技术的迅速发展而形成-f]学科。这些发展和思想促进了智能控
制理论的诞生.智能控制作为新兴的边缘交叉学科.目前对智能控制系统尚未统一的定义,然面对
它的基本特征却可加以描述,IEEE控制系统学会在文献【44】中描述为:“智能控制系统必须具有适应
能力以应付变化的环境和条件,但如果要能适应较大的不可预测的变化,系统还必须具有学习能力:
系统应具有在不确定环境中的自主能力,以最终实现自行设定并达到控制目标:为有效处理复杂性,
系统应具存分级分层的功能结构.”这显然对控制系统的设计提出了较高的要求,也为控制理论的
发展指明了方向.。在电厂控翻研究领域.目前关于智能控错的实际应用的报导虽然较少,但在各种
国际会议和杂志中发表文献【4习【46】【47】的日益增多表明了电厂控制系统研究的发展趋势。
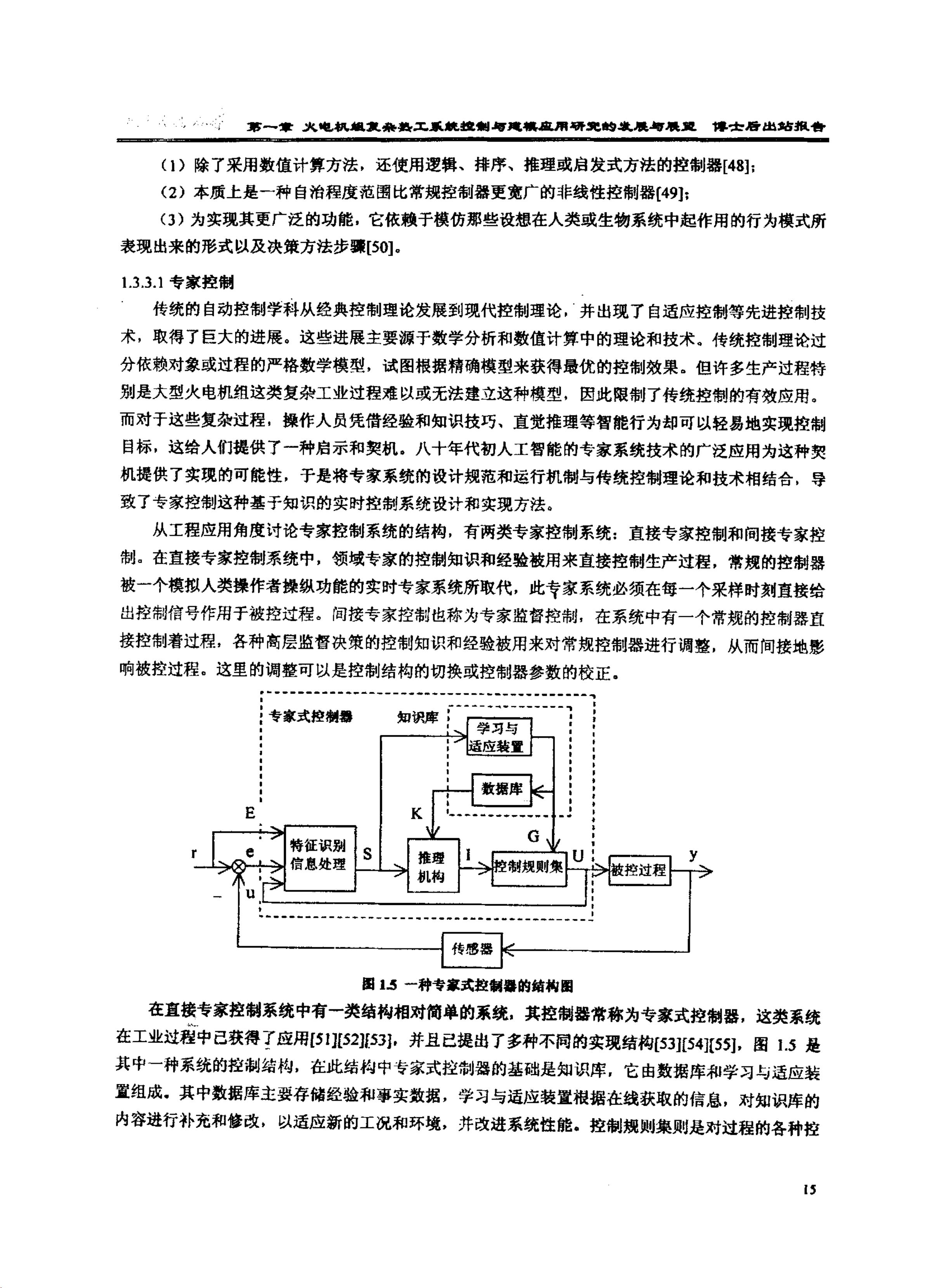
智能控制中“智能”的通常用法适用于那些采用模糊逻辑、专家系统或神经网络及其他智能
方法的控制系统,它通常表示具有下列特征的控制器:
14
剩余91页未读,继续阅读
2022-07-06 上传
2022-07-14 上传
2022-07-12 上传
2022-07-12 上传
2022-07-13 上传
2022-07-09 上传
2022-07-11 上传
2022-07-13 上传

programmh
- 粉丝: 4
- 资源: 2162
 我的内容管理
展开
我的内容管理
展开







最新资源
- C++解析PDF文件的源码示例
- ClassStuffdotjpg:课堂博客
- choco-cpviz:Choco3的扩展以处理cpviz librairie
- 主要用于学习mysql.zip
- capstan:基于Apache Flink的项目
- InfInstall VC++ inf安装程序
- Jenkins-webapp
- 喵API
- jsCodeDemo:JavaScript 模拟实现前端常见函数,算法面试题
- dfs-proxy:杂草dfs代理
- lpnyc:学习 Python NYC 的 TDD(测试驱动演示)旨在成为一个元包,可以自动测试发现针对 Python 2 和 3 运行的单元测试
- 这是我在学习《php 和MySql Web 开发》过程中所写的代码.zip
- api-spec-modules:用于实现REST API的一组可重用的规范
- VC++ 6.0远程备份下载程序
- gxsd-android-tch_stu:高速速读_老师端和学生端
- guess-the-number
