QTREE解法优化研究:动态树问题与高效算法
需积分: 9 167 浏览量
更新于2024-09-17
收藏 233KB PDF 举报
"QTREE解法的一些研究"
在本文中,作者YangZhe对QTREE解法进行了深入探讨,特别是针对SPOJ375问题的优化算法。尽管已有的解决方案,如基于Link-Cut Trees的O((n+q)logn)时间复杂度解法,能够解决此类问题,但作者注意到还有提升空间。Link-Cut Trees是一种强大的数据结构,适用于处理动态树问题,但它的性能在处理QTREE问题时并不理想,因为它没有充分利用问题的特性。
作者随后引入了一个利用问题特性的新解法,该方法的时间复杂度为O(n+qlog2n),在SPOJ平台上表现出良好的效率,一度排名第二。然而,为了进一步优化,作者尝试将路径维护的数据结构改为Splay Tree,期望通过减少常数因子来提高运行速度。虽然理论上时间复杂度降低到O((n+q)logn),但Splay Tree的常数因子大导致实际效果并不理想。
通过对各种解法的比较和分析,作者最终提出了一个静态的“全局平衡二叉树”数据结构。这种数据结构能够以O((n+q)logn)的时间复杂度维护整棵树,且在实践中表现出优于O(n+qlog2n)算法的速度。
动态树问题(Dynamic Tree Problems)是算法领域的一个重要课题,通常涉及树结构在操作过程中频繁改变的情况。Link-Cut Trees是一种为了解决动态树问题而设计的数据结构,包括Access、FindRoot、Cut和Join等基本操作。这些操作的平均时间复杂度为O(logn),得益于轻重边路径剖分(Heavy-Light Decomposition)和Preferred Child变化次数的均摊分析。
作者的研究旨在为QTREE问题提供更高效、更适合问题特性的解法,希望通过分享这些研究,激发更多人对动态树问题的深入探索。本文详述了各种解法的实现细节、时间复杂度分析以及它们在实践中的表现,对于理解动态树问题和Link-Cut Trees的应用具有很高的参考价值。
3.2 Link-Cut Trees 的的的操操操作作作
3.2.1 Access
ACCESS 操作是 Link-Cut Trees 的所有操作的基础. 假设调用了过程 ACCESS(v), 那么从点 v 到根结
点的路径就成为一条新的 Preferred Path. 如果路径上经过的某个结点 u 并不是它的父亲 parent(u) 的 Pre-
ferred Child, 那么由于 parent(u) 的 Preferred Child 会变为 u , 原本包含 parent(u) 的 Preferred Path 将
不再包含结点 parent(u) 及其之上的部分.
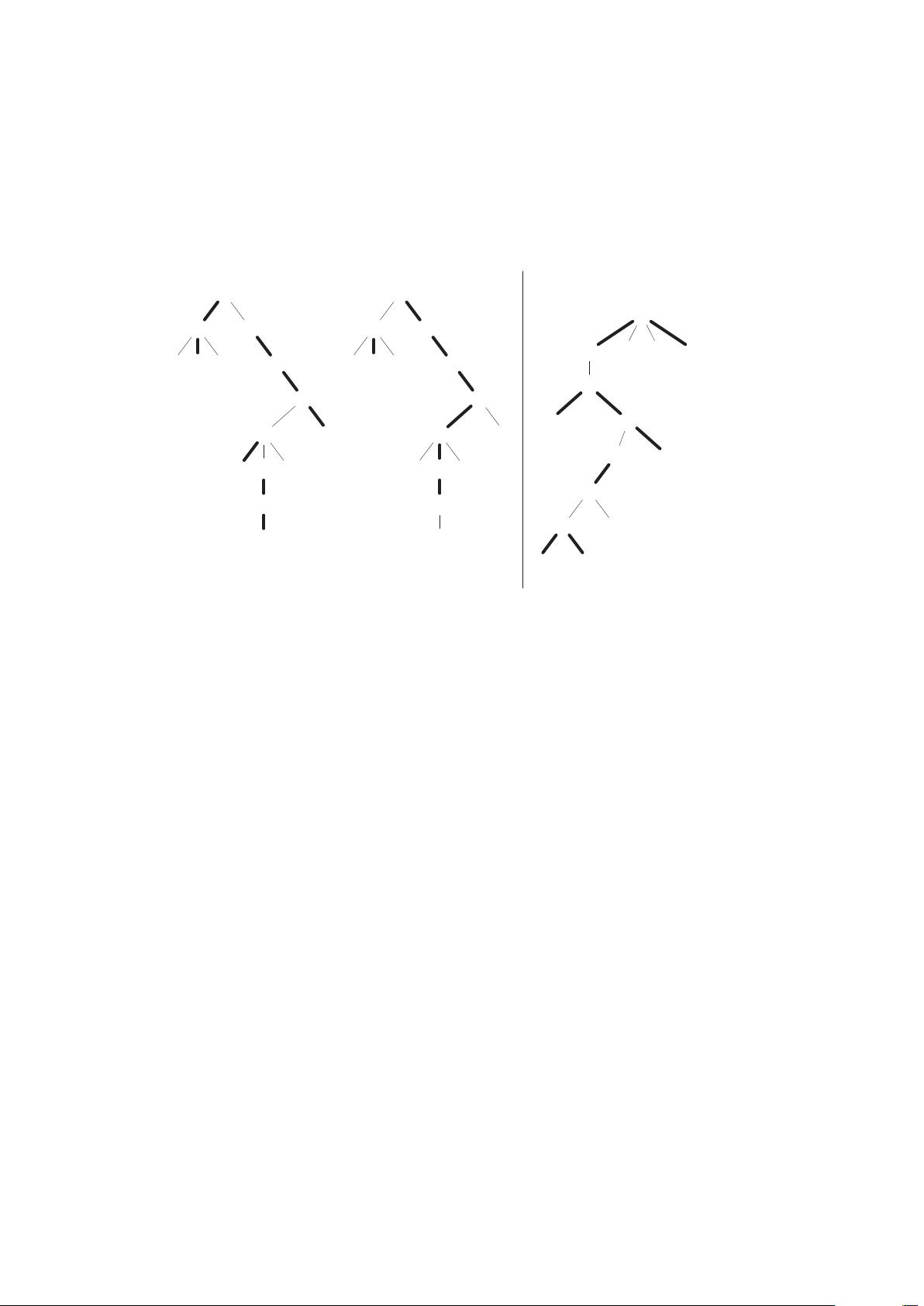
下图为 Link-Cut Trees 的一个结构示意图, 及一次 ACCESS 操作的前后对比图.
一棵树
ACCESS (N) 以后
ACCESS (N) 之前的 Link-Cut Trees
细边为 Path Parent 边,
粗边为 Auxiliary Tree
上的边
A
B C
D E F G
H
I J
K L M
N
O
A
B C
D E F G
H
I J
K L M
N
O
A
B
C
D EF
G
H
I
JK
L
MN
O
粗边为 Preferred Edge, 细边为普通边
图 1: 一棵树及其 Link-Cut Trees, 以及一次 ACCESS 操作的前后对比
ACCESS 的操作有些出人意料, 就是直接更新需要被更新的 Auxiliary Tree. 这看起来并不怎么高效,
但事实上, 在后面我们将证明它的时间复杂度是均摊 O(log n) 的.
首先, 由于访问了点 v, 那么它的 Preferred Child 应当消失. 先将点 v 旋转到它所属的 Auxiliary
Tree 的根, 如果 v 在 v 所属的 Auxiliary Tree 中有右儿子(也就是 v 原来的 Preferred Child), 那么应
该将 v 在 v 所属的 Auxiliary Tree 中的右子树(对应着它的原来的 Preferred Child 之下的 Preferred
Path)从 v 所属的 Auxiliary Tree 中分离, 并设置这个新的 Auxiliary Tree 的 Path Parent 为 v.
然后, 如果点 v 所属的 Preferred Path 并不包含根结点, 设它的 Path Parent 为 u, 那么需要将 u 旋转
到 u 所属的 Auxiliary Tree 的根, 并用点 v 所属的 Auxiliary Tree 替换到点 u 所属的 Auxiliary Tree 中
点 u 的右子树, 再将原来点 u 所属的 Auxiliary Tree 中点 u 的右子树的 Path Parent 设置为 u. 如此操作,
直到到达包含根结点的 Preferred Path.
3.2.2 Find Root
在 ACCESS(v) 之后, 根结点一定是 v 所属的 Auxiliary Tree 的最小结点. 我们先把 v 旋转到它所属
的 Auxiliary Tree 的根. 再从 v 开始, 沿着 Auxiliary Tree 向左走, 直到不能再向左, 这个点就是我们要找
的根结点. 由于使用的是 Splay Tree 数据结构保存 Auxiliary Tree, 我们还需要对根结点进行 Splay 操作.
3.2.3 Cut
先访问 v, 然后把 v 旋转到它所属的 Auxiliary Tree 的根, 然后再断开 v 在它的所属 Auxiliary Tree 中
与它的左子树的连接, 并设置.
3.2.4 Join
先访问 v , 然后修改 v 所属的 Auxiliary Tree 的 Path Parent 为 w, 然后再次访问 v .
3
剩余11页未读,继续阅读
点击了解资源详情
点击了解资源详情
点击了解资源详情
2010-07-10 上传
2022-08-03 上传
点击了解资源详情
2012-12-11 上传
2021-05-04 上传

xinge008
- 粉丝: 2
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- Android应用源码之写的google map api 应用.zip项目安卓应用源码下载
- AdvExpFig:导出 MATLAB 图-matlab开发
- SuperChangelog:超级变更日志插件的源代码
- death_calc_version2
- hw_python_oop
- LX-PWM,ev3程序怎么看c语言源码,c语言程序
- material-typeahead-sample
- 基于Linux、QT、C++的“别踩白块儿”小游戏
- physx-js:PhysX for JavaScript
- 提取均值信号特征的matlab代码-First_unofficial_entry_2021:First_unofficial_entry_20
- Siege_solution_website
- ecf-2021-jd
- number.github.io:通过Szymon Rutyna
- Kinesys-RenPy-Practice:RenPy制作游戏
- Ad,c语言源码反码补码转换代码,c语言程序
- vgrid:具有魔术媒体查询混合功能的可变SCSS网格系统
