Matlab/Simulink中的滑模软起动器仿真与控制研究
47 浏览量
更新于2024-08-31
2
收藏 267KB PDF 举报
"基于Matlab/Simulink的滑模软起动器仿真研究探讨了电动机软起动技术,尤其是滑模控制在软起动器中的应用。研究提出了一种滑模软起动装置,它整合了斜坡起动、限流起动、转矩控制起动和分级变频起动四种模式,以适应不同工况下的电机起动需求。通过Matlab/Simulink环境的仿真,验证了滑模控制策略的有效性和灵活性,有助于拓宽软起动器的应用领域。"
滑模软起动器是一种创新的电机起动解决方案,它利用滑模控制理论来调整触发脉冲导通角,从而改变电机的起动特性。这种控制方法无需对硬件进行大幅度改动,降低了成本,同时提供了更广泛的起动选项。在软起动器的控制系统结构中,包括了四个软起动子模块,它们分别对应斜坡起动、限流起动、转矩控制起动和分级变频起动。用户可以根据实际工况选择合适的起动模式。
1.1 仿真系统建模
在Matlab/Simulink环境下,构建了一个包含多种起动方式的软起动器模型。该模型不仅涵盖了传统的斜坡起动和限流起动,还包含了针对重载电机的转矩控制起动和分级变频起动。通过软起动方式滑模选择模块,用户能够灵活切换不同起动模式。系统仿真框图展示了各个模块间的相互作用,包括滑模软起动控制、交流调压、电机模型以及电气测量等关键部分。
1.2 触发脉冲子模块
触发脉冲子模块是系统的重要组成部分,它使用6脉冲发生器产生晶闸管所需的触发信号,并能进行延迟处理,确保对电机的精确控制。触发脉冲的精确性直接影响到电机起动的平稳性和效率。
滑模控制是一种非线性控制策略,它通过设计一个动态变化的边界(滑模表面)使得系统状态能在任意时刻趋近并保持在该表面上,从而实现对系统性能的快速响应和鲁棒性。在软起动器中,滑模控制允许电机在不同工况下快速适应,确保在起动过程中电流和转矩的平滑过渡,减少对电网的冲击,提高起动效率。
通过Matlab/Simulink的仿真,可以对滑模软起动器的性能进行深入分析和验证。仿真结果能够展示不同起动模式下电机的动态响应,如起动时间、电流波形、转矩变化等,为实际工程应用提供可靠的数据支持。
总结来说,基于Matlab/Simulink的滑模软起动器仿真研究为电动机的高效、灵活起动提供了新的思路。这种控制策略结合了多种软起动方式,提升了设备的适用性,有助于在各种工况下实现电机的平滑起动,减少对电网的影响,同时降低了硬件成本。
基于基于Matlab/Simulink的滑模软起动器仿真研究的滑模软起动器仿真研究
随着电动机的广泛使用,对电机起动的要求越来越高,对软起动装置也使用越来越多。滑模软起动器几种软起
动方式的改变主要是通过对触发脉冲导通角(alpha)不同计算方法实现的,不需要对软起动装置的硬件作大的改
变,也不会增加硬件成本。提出了一种滑模软起动装置,构建了斜坡起动、限流起动、转矩控制起动和分级变
频起动四种软起动模型。通过滑模控制,使软起动装置能够满足在不同工作场合下电动机的起动要求,进而扩
大软起动装置的使用范围。在Matlab/Simulink环境下对该软起动控制装置进行建模仿真。
摘要:摘要:随着电动机的广泛使用,对电机起动的要求越来越高,对软起动装置也使用越来越多。
关键词:关键词:滑模;软起动器;Simulink;斜坡起动;限流起动;转矩控制起动;分级变频起动
0 引言引言
不同的电机软起动方式具有各异的特性。斜坡起动、限流起动解决电机起动过程产生的过大冲击电流,这种起动方式适合
于轻载电机起动;转矩控制起动、分级变频起动可以解决使用降压起动带来的起动转矩过小的问题,适用于重载的电机起动。
构建适应不同工作场合需
要的电动机滑模软起动控制器具有工程应用价值。滑模软起动装置集斜坡起动、限流起动、转矩控制起动、分级变频起动
等方式于一体,通过改变对交流模块输入的晶闸管导通脉冲选择电动机的软起动方式,进而扩大软起动装置的使用范围。本文
在Matlab/Simulink环境下对滑模软起动进行了建模仿真研究。
1 软起动器的控制系统结构软起动器的控制系统结构
1.1 仿真系统建模
在Mafiab/Simulink环境中,建立一个软起动器的模型,其综合了斜坡软起动、限流软起动、转矩控制软起动及分级变频
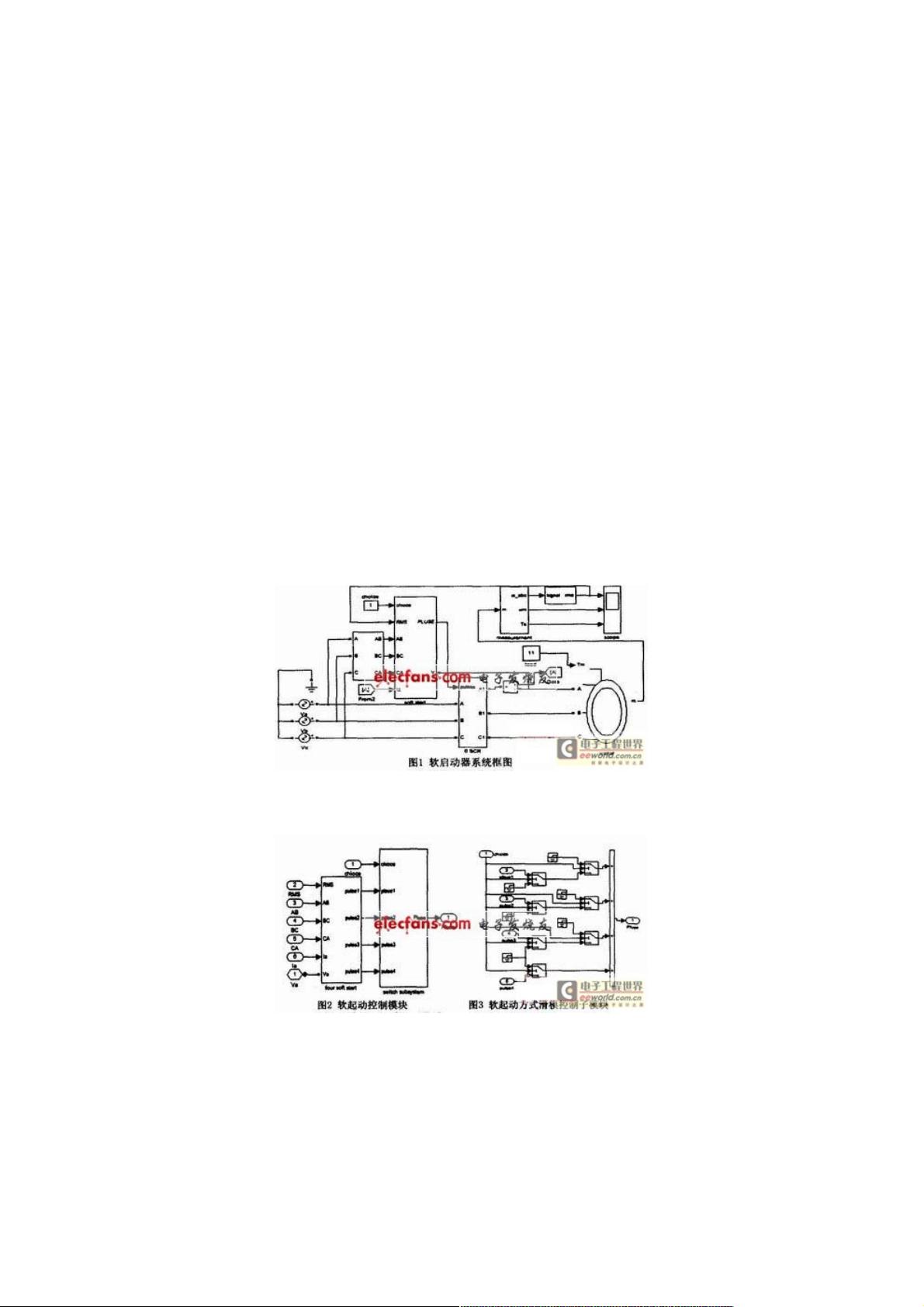
软起动这几种软起动方式。并且使该软启动器实现能够让用户根据需要,选择一种适合用于电机软起动的方式进行起动。图1
是基于Simulink的系统仿真框图。在仿真系统中,主要包括了滑模软起动控制、交流调压、电机和电气测量模块等单元。
滑模软起动控制模块是由4个软起动子模块(four soft start)和软起动方式滑模选择模块(switch subsystem)组成。输入量有
电机定子电流单相有效值RMS、电机A相输入的电压值Va与电流值Ia和同步电压。
1.2 触发脉冲子模块
在整个系统中的晶闸管的触发脉冲主要使用6脉冲发生器模块来产生,并且能够对6脉冲进行延迟,生成一组可控的6相脉
冲波。产生的6相脉冲在4个软起动方式中都有使用。其中图4是六脉冲发生器的子系统。
下载后可阅读完整内容,剩余3页未读,立即下载
430 浏览量
630 浏览量
1239 浏览量
107 浏览量
229 浏览量
2021-10-16 上传

weixin_38581308
- 粉丝: 2
 我的内容管理
展开
我的内容管理
展开







最新资源
- MSP430单片机与DS1302的调试技术探讨
- Vue 3 UI功能构建:Baleada Composition与API的结合应用
- 筱可账号密码快捷输入工具——懒人族的快速登录神器
- Flask应用实现:用户登录时生成令牌
- 利用jQuery打造动态交互的万年历应用
- 一键部署:内置JDK的Tomcat7稳定版本
- hao123看图王绿色免安装版体验:简洁实用的图片浏览工具
- Android客户端通过POST与Servlet服务器交互示例
- 使用lodash.js在Tryit编辑器中实现简单功能
- SpringBoot与Kafka集成实践教程:定时消费Topic示例
- 新中新DKQ-A16D阅读软件功能介绍
- C语言轻松制作52单片机打地鼠游戏
- React Native高效本地选取器的配置与应用
- 阳光ICO图标提取器:免费绿色软件快速提取图标
- Android端图片上传至PHP服务器详细教程
- Python项目:模因生成器入门与部署指南
