卫星高度计与地球科学:技术与应用手册
需积分: 10 111 浏览量
更新于2024-07-18
1
收藏 63.12MB PDF 举报
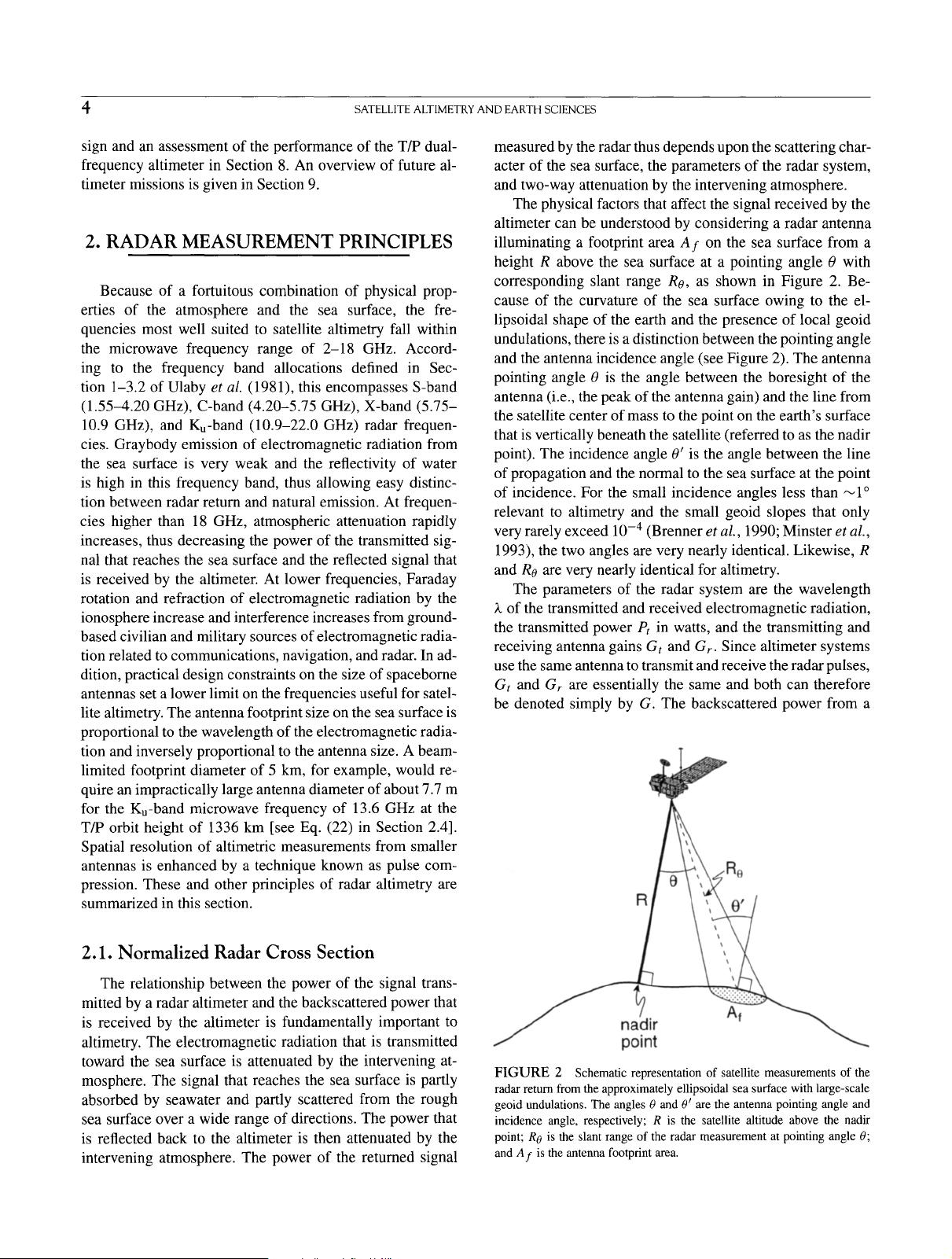
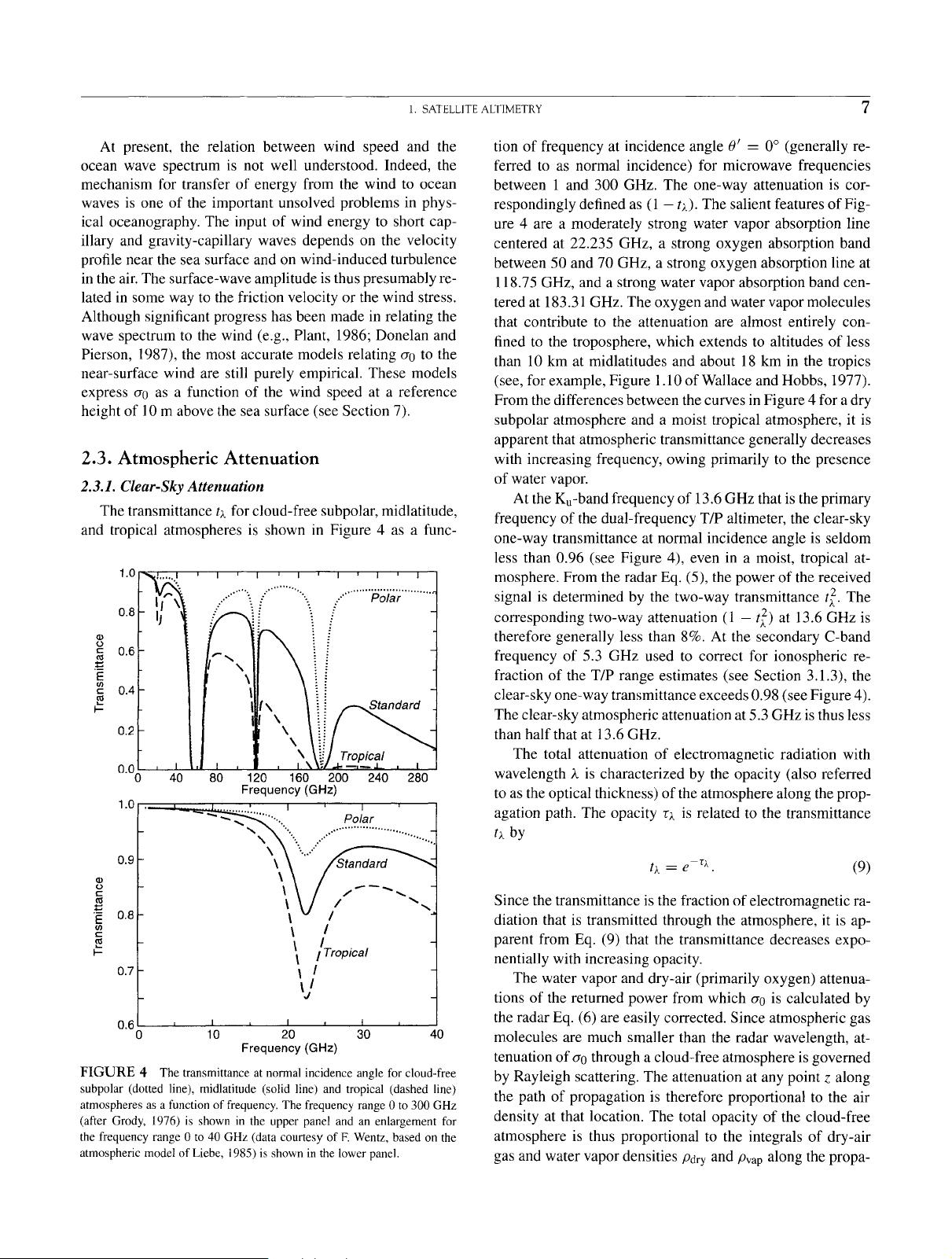
"Satellite Altimetry and Earth Sciences-Lee.Lueng.Fu"
《卫星测高与地球科学》是国际地球物理学系列中的第69卷,由李-卢恩·傅(Lee-Lueng Fu)和安妮·卡森纳维(Anne Cazenave)编辑。这本书详细介绍了卫星测高技术及其在地球科学中的应用,涵盖了海洋学、大地测量学和地球物理学等领域。
卫星测高技术起源于20世纪60年代的人造卫星时代,它通过在太空中的雷达测高仪对全球海面形状进行频繁测量。这种技术具有革命性的意义,因为它能够快速获取全球海洋的地形信息,而这是传统船舶测量无法实现的。海洋的环流、温度和盐度时刻在变化,船只需要数周或数月才能横渡大洋进行测量,因此无法实时全面地观测全球海洋。
卫星测高技术的出现为海洋学家提供了一种独特工具,可以绘制全球海洋地形图,从而研究海洋环流及其随时间的变化。它对于理解洋流模式、海平面变化、气候变化以及地球动力学过程至关重要。此外,卫星测高数据还能用于监测冰川消融、海岸线变化、台风和飓风活动,以及评估全球变暖对海洋生态系统的影响。
在大地测量学方面,卫星测高技术有助于精确测定地球的形状和地壳运动,这对于地震学、板块构造研究以及地壳均衡理论有重要贡献。同时,它在地球物理学中也有广泛应用,例如研究海洋重力场、地磁场和地球内部结构。
该书详尽阐述了卫星测高的原理、数据处理方法和各种应用技术,为科研人员、工程师和学生提供了宝贵的参考资料。书中可能包括了数据校正、误差分析、时间序列分析、数据融合等关键技术的讨论,以及如何将这些数据应用于气候模型、海洋环流模型的构建和改进。
《卫星测高与地球科学》是一部综合性的手册,不仅详细介绍了卫星测高技术,还展示了其在地球科学研究中的广泛和深远影响。通过这本书,读者可以深入了解这一领域的最新进展和技术挑战,以及它如何塑造我们对地球系统动态的理解。

1. SATELLITE ALTIMETRY 3
measurement imprecision can be reduced to less than 1 cm
by averaging the measurements over along-track distances
of ~ 100 km. Other sources of measurement error such as
corrections for atmospheric refraction and sea-state biases in
the range estimates are of much greater concern since they
typically have length scales on the order of 100 km or longer.
Through a concerted effort devoted to algorithm improve-
ment, the root-sum-of-squares of these various measurement
errors has been reduced to about 2.7 cm (see Table 11 in
Section 8.3). Equally important, there has been a parallel im-
provement in precision orbit determination that has reduced
root-mean-square errors of estimated orbit height H from
10 m for GEOS-3 to 2.5 cm for TOPEX/POSEIDON (see
Table 1). The overall root-sum-of-squares measurement ac-
curacy for the TOPEX/POSEIDON dual-frequency altime-
ter estimates of sea-surface height is therefore about 4 cm
(see Section 8.3).
One of the purposes of this chapter is to pay tribute to the
success of the intensive effort that has been devoted to the
technical details of altimetry over the past 2 decades. The
present ~4 cm state-of-the-art overall accuracy of the sea-
surface height estimates h has been achieved through ma-
jor technological advancements in precision orbit determi-
nation and a dedicated effort to improve each of more than
40 sensor and geophysical algorithms. This attention to algo-
rithm improvements has transformed altimetry from a semi-
quantitative measurement of the sea-surface height for which
the distinction between measurement errors and geophysical
signals was sometimes difficult to discern, to a highly quan-
titative measure of sea-surface height variability that is pro-
viding insight into the wide range of dynamical processes
summarized in later chapters. Moreover, a major benefit of
the high degree of accuracy that has been achieved with the
TOPEX/POSEIDON dual-frequency altimeter is that it is no
longer essential for users to be deeply versed in all of the id-
iosyncrasies of satellite altimetry. Altimetry has thus become
a standard tool for oceanographic research.
The interest in ever more subtle signals with smaller-
amplitude sea-surface height signatures in the altimeter data
demands a thorough understanding of the errors of each of
the corrections applied to altimeter data. As various algo-
rithms have improved, errors in other algorithms that were
once considered of secondary concern have become the fo-
cus of attention. Each of the corrections that must be applied
for accurate determination of the sea-surface height by satel-
lite altimetry is described from basic principles in this chap-
ter. Although full wavenumber-frequency descriptions of the
various measurement errors are not yet available, the magni-
tudes of the errors of each of the corrections can be estimated
as described herein. If not taken into consideration, some of
these errors might be mistakenly interpreted as variations of
the sea surface height.
As summarized above and shown schematically in Fig-
ure 1, accurate determination of the orbit height H is an
integral part of altimetric determination of the sea-surface
height h. Indeed, the improvement in orbit accuracy by more
than two orders of magnitude over the past decade is the pri-
mary reason for the improved accuracy and utility of altime-
ter data. A detailed discussion of the evolution of precision
orbit determination is therefore included as Section 4 in this
chapter.
Accurate estimates of R and H are not sufficient for
oceanographic applications of altimeter range measure-
ments. The sea-surface height given by Eq. (2) relative to
the reference ellipsoid is the superposition of a number of
geophysical effects. In addition to the dynamic effects of
geostrophic ocean currents that are of primary interest for
oceanographic applications (see Chapters 2, 3, and 4), h
is affected by undulations of the geoid
h g
about the ellip-
soidal approximation (Chapter 10), tidal height variations
h r (Chapter 6), and the ocean surface response
ha
to
at-
mospheric pressure loading (Chapter 2). These effects on
the sea-surface height must be modeled and removed from
h in order to investigate the effects of geostrophic currents
on the sea surface height field. The geoid undulations, tidal
height and atmospheric pressure loading contributions to h
are briefly described here in Section 5; more detailed discus-
sions are given in later chapters. The dynamic sea-surface
height is thus estimated as
hd = h - hg - hr -- ha
= H-R+ZARj-hg-hr-ha.
(3)
J
While complicating altimetric estimation of the range R,
the alteration of the incident radar pulse by the rough sea
surface can be utilized to extract other geophysical informa-
tion from the radar returns. In particular, the significant wave
height 3 can be estimated from the shape of the returned sig-
nal as described in Sections 2.4.2 and 6. In addition, since the
sea-surface roughness is highly correlated with near-surface
winds, the wind speed can be estimated from the power of
the returned signal as described in Section 7.
The emphasis throughout this chapter is on the correction
algorithms applied to the dual-frequency altimeter onboard
the TOPEX/POSEIDON satellite (referred to hereafter as
T/P). This state-of-the-art altimeter sets the standard for fu-
ture altimeter missions since it is significantly more accurate
than any of the other altimeters that have been launched to
date. After discussions of the various elements of satellite
estimation of the sea surface height as outlined above, the
chapter concludes with a summary of the T/P mission de-
3As discussed in Sections 2.4.1 and 6, the significant wave height is a
traditional characterization of the wave height field that is approximately
equal to four times the standard deviation of the wave heights within the
altimeter footprint.


剩余476页未读,继续阅读
2018-11-25 上传
2019-05-28 上传
2023-05-23 上传
2023-08-02 上传
2023-04-02 上传
2023-06-12 上传
2023-06-12 上传
2023-06-12 上传
2023-06-07 上传

qidaimu
- 粉丝: 16
- 资源: 19
 我的内容管理
展开
我的内容管理
展开







最新资源
- 磁性吸附笔筒设计创新,行业文档精选
- Java Swing实现的俄罗斯方块游戏代码分享
- 骨折生长的二维与三维模型比较分析
- 水彩花卉与羽毛无缝背景矢量素材
- 设计一种高效的袋料分离装置
- 探索4.20图包.zip的奥秘
- RabbitMQ 3.7.x延时消息交换插件安装与操作指南
- 解决NLTK下载停用词失败的问题
- 多系统平台的并行处理技术研究
- Jekyll项目实战:网页设计作业的入门练习
- discord.js v13按钮分页包实现教程与应用
- SpringBoot与Uniapp结合开发短视频APP实战教程
- Tensorflow学习笔记深度解析:人工智能实践指南
- 无服务器部署管理器:防止错误部署AWS帐户
- 医疗图标矢量素材合集:扁平风格16图标(PNG/EPS/PSD)
- 人工智能基础课程汇报PPT模板下载
